Podstawowe zasady poleceń umiejętności
Polecenia umiejętności bazują na kilku wzorach działania.
Aby robot mógł rozpocząć działanie, należy podać masę i punkt środkowy narzędzia (TCP) zamontowanego w robocie, a podstawowy schemat operacyjny poleceń związanych z uprawnieniem musi wykorzystywać położenie podejścia i wycofania prostopadłe do położenia odniesienia.
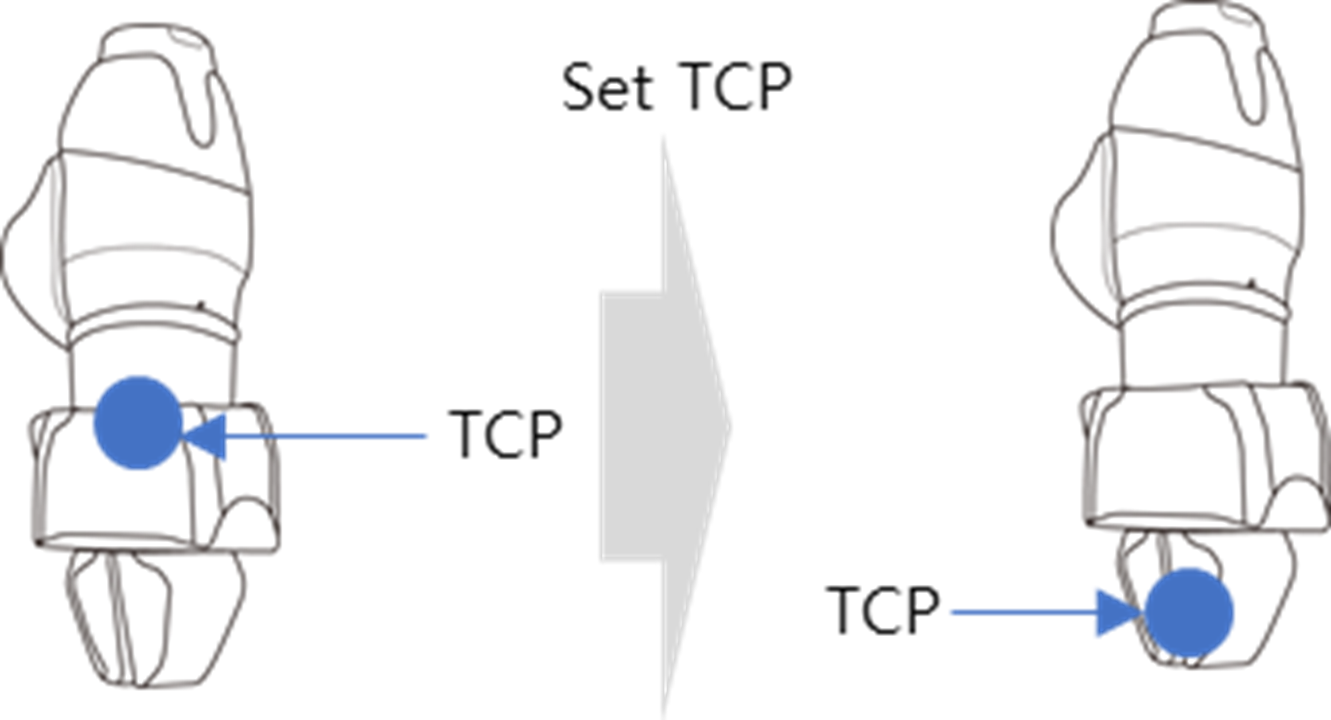
TCP Setting: Użycie polecenia umiejętności End Effector spowoduje automatyczną zmianę ustawienia przesunięcia TCP. Etap wykonania polecenia umiejętności End Effector zawiera ustawienie przesunięcia dostosowane do TCP dla End Effector. Jeśli przesunięcie TCP zmienia się, korzystanie z funkcji Blending Motion, która płynnie łączy polecenie poprzedniego ruchu, nie jest możliwe.
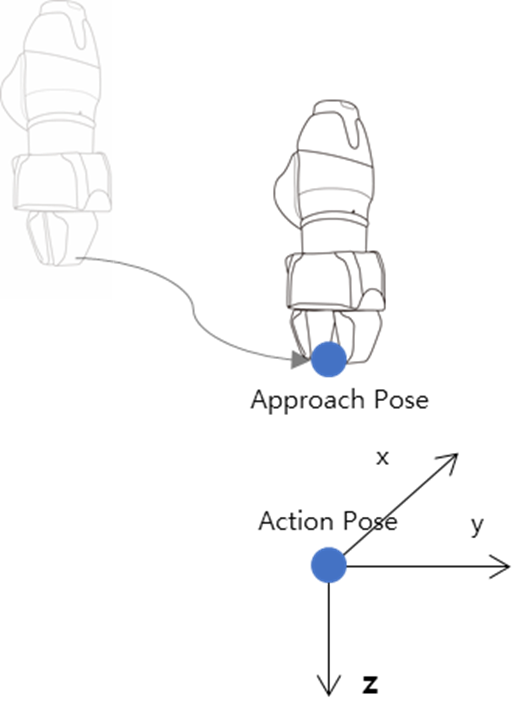
Move to Approach Pose: Punkt dostępny w celu wykonania ruchu do pozycji podejścia. Ustawia się w kierunku Z z Approach Pose (pozycji podejścia), ale można też wybrać inny kierunek. Wprowadzona odległość podejścia jest obliczana automatycznie dla pozycji działania i przenosi się do odpowiedniego punktu.
Move to Reference Pose: Punkt na przedmiocie obrabianym, w którym efektor końcowy wykonuje pracę. Aby ustawić szczegółowe współrzędne inne niż prędkość i przyspieszenie dla położenia
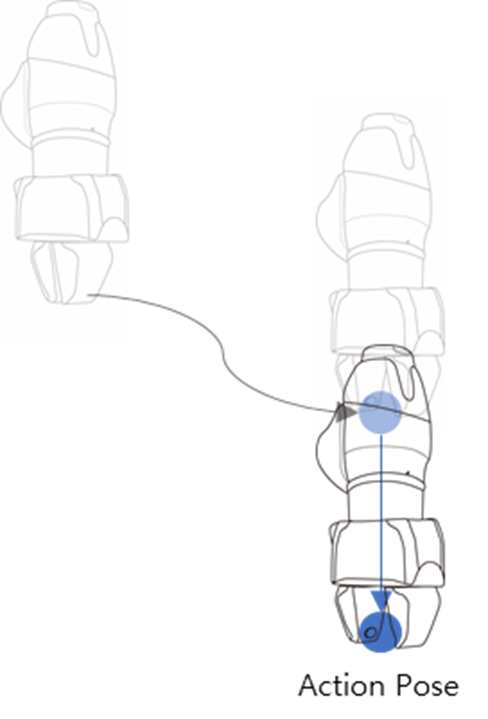
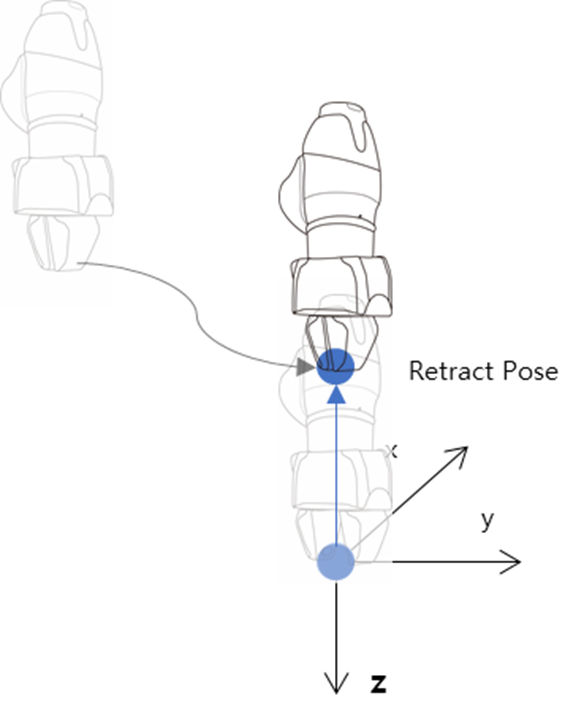
Move to Retract Pose: Punkt pobierania obrabianego przedmiotu i bezpiecznego przenoszenia go do następnego punktu. Jest to kierunek Z z Approach Pose (pozycji podejścia), ale można też wybrać inny kierunek. Wprowadzona odległość cofania jest obliczana automatycznie dla pozycji działania i przenosi się do odpowiedniego punktu.
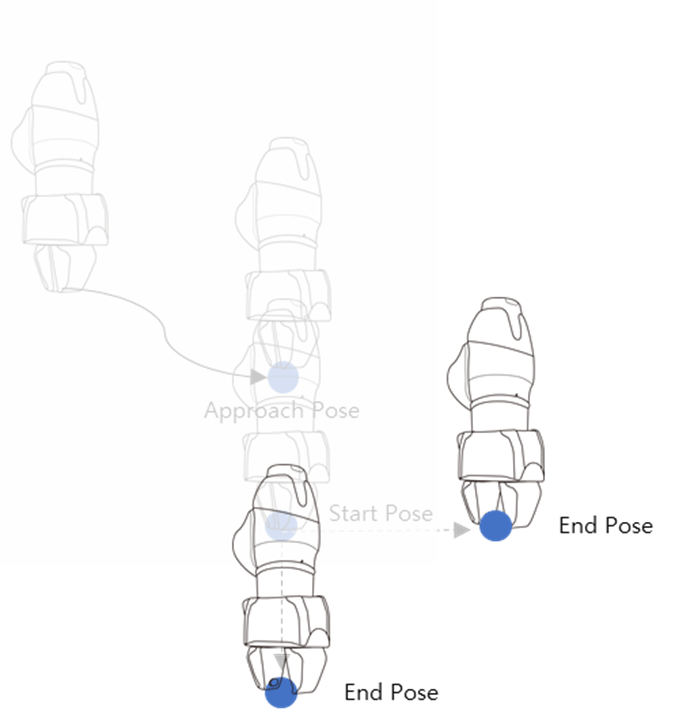
Move to Start Pose: Jeśli cel działania efektora końcowego nie kończy się pojedynczym ruchem, może istnieć punkt pośredni i punkt końcowy, a pozycja początkowa działania to punkt, w którym rozpoczyna się praca. (tj. uprawnienie Door_OpenClose – położenie początkowe)
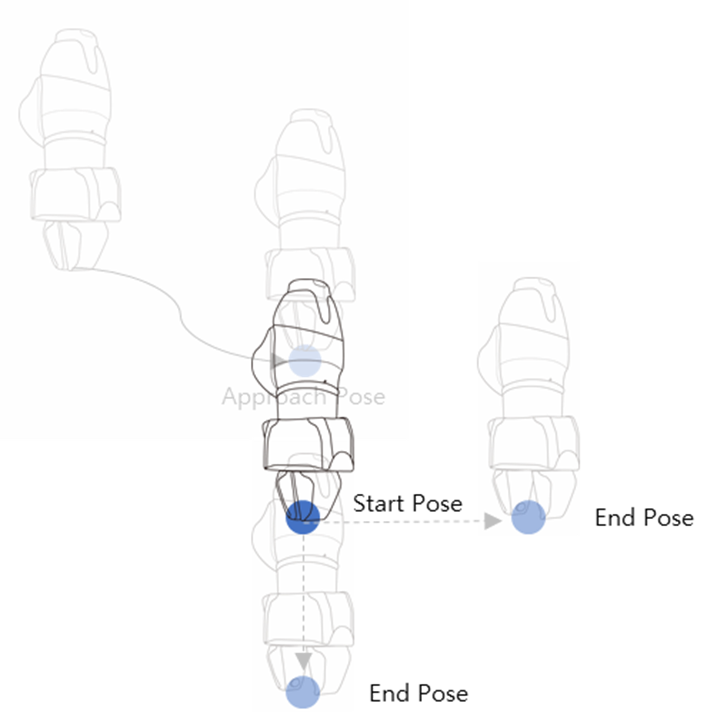
Move to End Pose: Jeśli cel działania efektora końcowego nie kończy się na pojedynczym ruchu, może istnieć punkt pośredni i punkt końcowy, a pozycja zakończenia działania to punkt, w którym kończy się praca. (tj. uprawnienie Door_OpenClose – położenie końcowe)