
Obsługa ręczna – naucz się, jak prowadzić bezpośrednie nauczanie
OBOWIĄZKOWE ŁATWE 5 MIN

Bezpośrednie nauczanie jest używane do trzymania końca robota rękami, aby popchnąć i pociągnąć robota do żądanej pozycji, a następnie zastosować pose do aktualnie wybranego ruchu. Istnieją dwie metody nauczania bezpośredniego.
- Freedrive: Każde połączenie porusza się w kierunku, w którym użytkownik zastosował siłę
- Powiązany ruch: Koniec robota porusza się lub obraca tylko w kierunku ustawionym w ruchu powiązanym, nawet gdy siła jest zastosowana z kierunku losowego
Freedrive
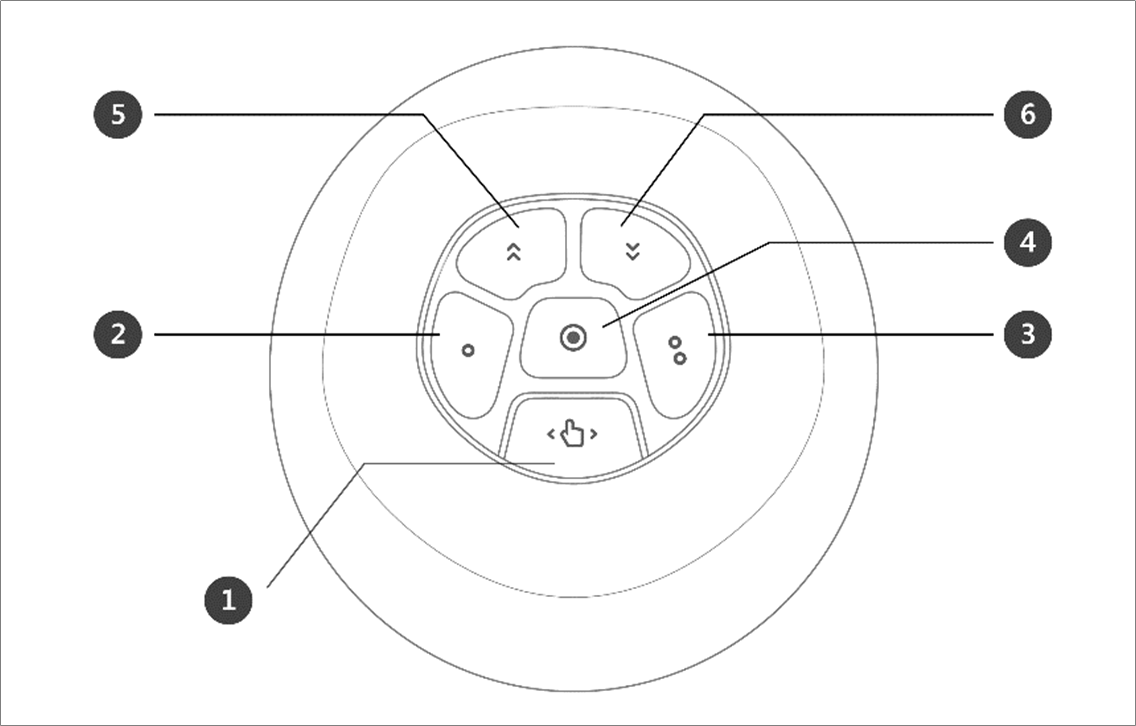
Naciśnięcie przycisku 1 powoduje włączenie trybu Freedrive, co umożliwia swobodne przemieszczanie robota. Każde połączenie porusza się w kierunku, w którym użytkownik zastosował siłę. Po zwolnieniu przycisku robot nie może być przesuwany ręcznie.
- Podczas bezpośredniego nauczania dioda LED robota miga na niebiesko.
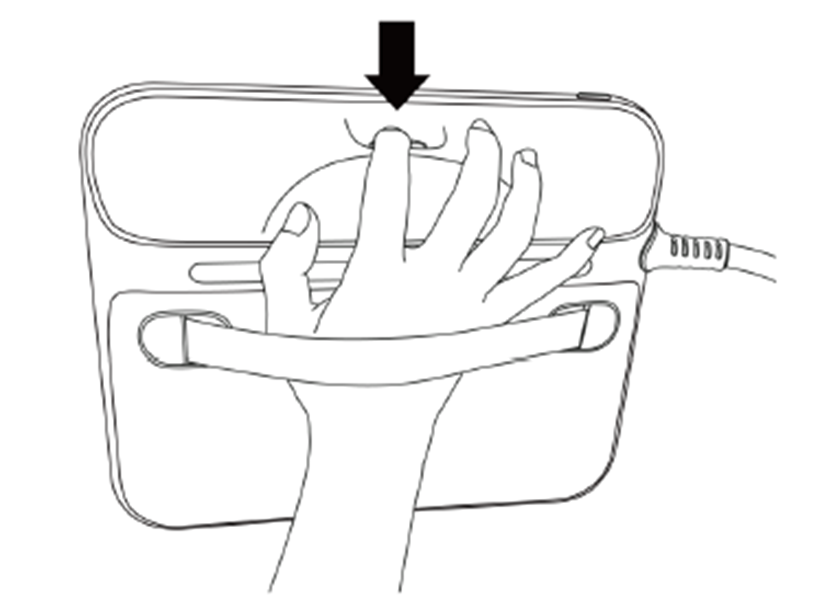
Naciśnięcie przycisku ręcznego prowadzenia z tyłu manipulatora spowoduje włączenie trybu Freedrive, podobnie jak naciśnięcie przycisku 1, a robot będzie mógł poruszać się swobodnie.
Więcej informacji na temat poszczególnych funkcji przycisków zawiera Obsługa za pomocą prowadzenia ręcznego.
Powiązany ruch
Po naciśnięciu przycisku 2 i przycisku 3 koniec robota porusza się tylko w kierunku odpowiadającym warunkowi powiązania, nawet gdy siła jest przykładana z kierunku losowego. Warunek powiązania można ustawić z 2 z 4 warunków na poniższym rysunku: Powiązana oś z, powiązana płaszczyzna fix, powiązana powierzchnia i powiązana kierunek.