
Mocowanie robota
Przymocować robota czterema śrubami M8, wkręcając je w otwory 9,5 mm w podstawie manipulatora.
- Zalecamy stosowanie momentu dokręcenia śrub 20 Nm.
Podłożyć podkładkę (płaską lub sprężystą), aby zapobiec poluzowaniu śrub wskutek drgań.
- Za pomocą znacznika Φ5 określić dokładnie stałe miejsce montażu manipulatora.
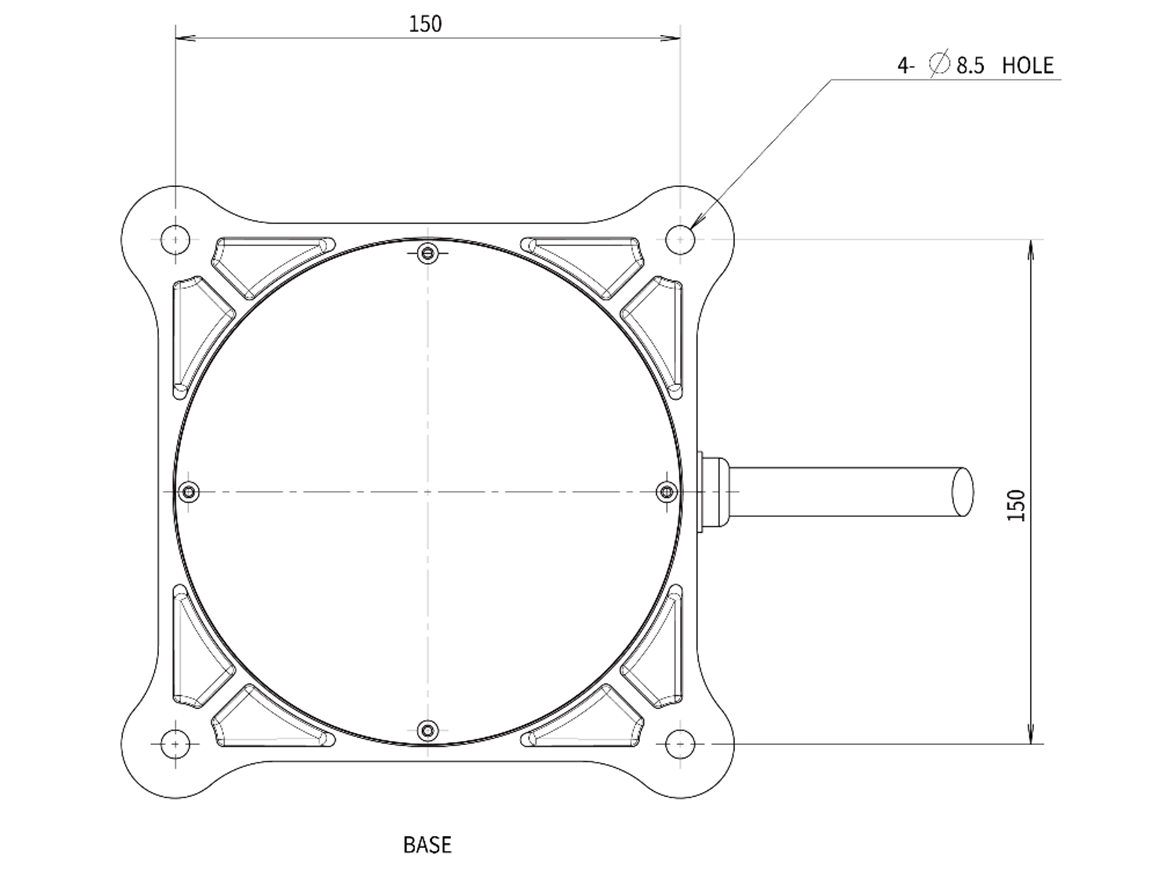
Rysunek podstawy manipulatora: użyć czterech śrub M8. Jednostka [mm]
Ostrzeżenie
- Dokręcić śruby do oporu, aby zabezpieczyć manipulator przed poluzowaniem podczas obsługi.
- Zainstalować podstawę manipulatora na solidnej powierzchni zdolnej wytrzymać obciążenie powstające podczas pracy (10 x maks. moment i 5 x masa robota).
- Robot zinterpretuje drgania podstawy manipulatora jako kolizję i uaktywni zatrzymanie awaryjne Dlatego w miejscach montażu, w których zachodzi automatyczna zmiana położenia, nie należy montować podstawy robota tam, gdzie występuje duże przyspieszenie ruchu.
- Zamontować ramię manipulatora w określonym miejscu za pomocą odpowiednich metod. Powierzchnia montażu musi być solidna.
- Manipulator ulegnie uszkodzeniu w przypadku dłuższego kontaktu z wodą. Nie korzystać z robota w warunkach, w których mógłby ulec zamoczeniu lub znaleźć się pod wodą.