Kształty limitów przestrzeni / stref są ustawiane w następujący sposób:
Element
Opis
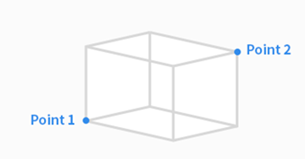
Cuboid
Kształt limitu przestrzeni / strefy ustawiany jest jako prostopadłościan.
Użytkownik wprowadza dolny punkt końcowy (Point 1) i górny punkt końcowy (Point 2) prostopadłościanu i naciska przycisk Save Pose.
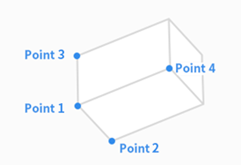
Tilted Cuboid
Kształt limitu przestrzeni / strefy ustawiany jest jako nachylony prostopadłościan.
Wprowadzić punkt odniesienia (Point 1), punkt końcowy osi x (Point 2), punkt końcowy osi y (Point 3), punkt końcowy osi z (Point 4) prostopadłościanu nachylonego i nacisnąć przycisk Save Pose.
Trzy linie (Point 1-Point2, Point 1-Point 3, Point 1-Point 4) muszą przecinać się pod kątem prostym. (Dopuszcza się odchylenie ±5 stopni)
Ruch ograniczony „blokady powierzchni” i „blokady osi” oparty na punkcie 1 pomoże robotowi łatwiej uzyskać punkt 2, punkt 3 i punkt 4.
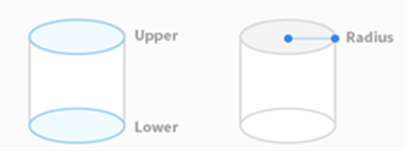
Cylinder
Kształt limitu przestrzeni / strefy ustawiany jest jako walec.
Należy wprowadzić punkt jako odległość promieniową, punkt na górnej i na dolnej płaszczyźnie walca, a następnie nacisnąć przycisk Save Pose.
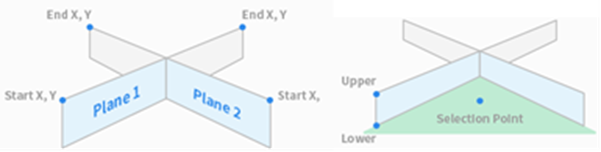
Multi-plane Box
Kształt limitu przestrzeni / strefy ustawiany jest jako pudełko wielopłaszczyznowe.
Należy ustawić wysokość góry i dołu ramki, a następnie nacisnąć przycisk Add Pose w celu dodania płaszczyzny.
Zaznaczyć współrzędne X i Y, aby ustawić kierunek płaszczyzny, i nacisnąć przycisk Save Pose. Użytkownik może skonfigurować do sześciu płaszczyzn.
Należy ustawić współrzędne punktów obszaru przeznaczonego do skonfigurowania.
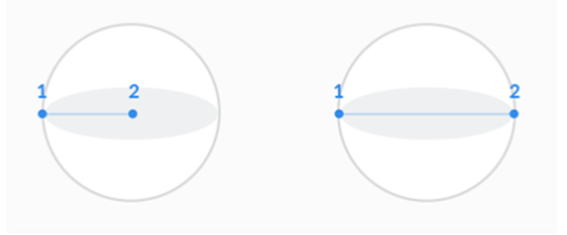
Sphere
Kształt limitu przestrzeni / strefy ustawiany jest jako kula.
Aby skonfigurować promień, należy podać położenie punktu środkowego i punkt skrajnego kuli, natomiast w celu skonfigurowania średnicy należy wprowadzić dwa punkty skrajne kuli, a następnie nacisnąć przycisk Save Pose.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.