
Ekran trybu rzeczywistego: Karta z informacjami o efektorze końcowym
Karta z informacjami o efektorze końcowym na ekranie trybu rzeczywistego Task Builder ma następującą strukturę:
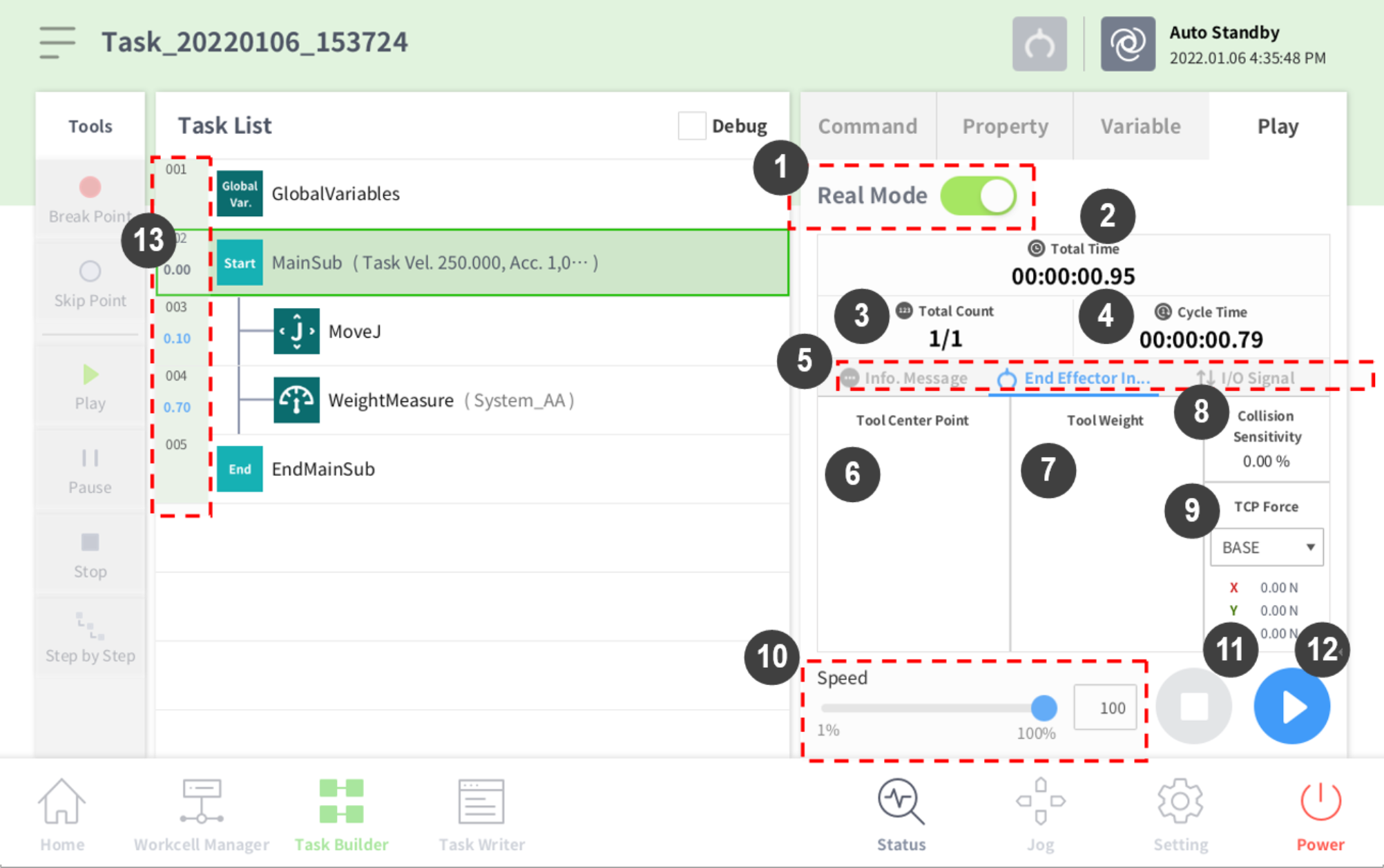
Lp | Element | Opis |
1 | Real Mode ( | Służy do ustawiania trybu testowego robota.
|
2 | Total time | Wyświetla całkowity czas, jaki upłynął od uruchomienia zadania. |
3 | Total count | Wyświetla całkowitą liczbę wykonań zadania. |
4 | Average execution time | Wyświetla średni czas, jaki upłynął podczas wykonywania jednego cyklu zadania na liście zadań. |
5 | Information Screen Shift Tab | Możesz przełączać się między ekranem wiadomości z informacjami o robocie, ekranem informacji o efektorze końcowym i ekranem informacji o wejściu/wyjściu.
|
6 | Tool center point information area | Wyświetla informacje o punkcie środkowym narzędzia ustawione na podstawie funkcji punktu środkowego narzędzia oraz konfiguracji ciężaru ustawionego polecenia TCP lub impulsowania. |
7 | Tool weight information | Wyświetla informacje o ciężarze narzędzia ustawione na podstawie funkcji punktu środkowego narzędzia oraz konfiguracji ciężaru ustawionego polecenia TCP lub impulsowania. |
8 | Collision information area | Wyświetla wartość czułości kolizji ustawioną dla obszaru, w którym znajduje się robot w danym momencie. |
9 | Force information area | Wyświetla informacje o sile występującej w układach współrzędnych: bazowym, światowym, użytkownika i referencyjnym. Referencyjny układ współrzędnych pokazuje siłę na podstawie informacji o układzie współrzędnych zastosowanym do robota. |
10 | Speed slider | Służy do ustawiania prędkości robota w trybie rzeczywistym lub wirtualnym. |
11 | Stop button | Zatrzymanie bieżącego zadania. |
12 | Execute/pause toggle button | Wykonuje lub wstrzymuje pracę z listy zadań. |
13 | Time | Wyświetla czas poświęcony odpowiedniemu poleceniu/umiejętności. |

Przestroga
- Przed wykonaniem zadania należy symulować je w trybie wirtualnym, aby sprawdzić, czy przebiega zgodnie z planem.
- Zaleca się testowanie programu robota przez wyznaczanie tymczasowych punktów orientacyjnych poza obszarem roboczym innej maszyny. Firma Doosan Robotics nie odpowiada za uszkodzenia powstałe wskutek błędnego programowania lub nieprawidłowego działania robota ani za uszkodzenia sprzętu.
- Przycisk zatrzymania awaryjnego znajduje się na programatorze ręcznym. W razie nagłej potrzeby należy nacisnąć przycisk zatrzymania awaryjnego, aby zatrzymać robota.
W modelach bez czujnika Force Torque Sensor wartości siły (X, Y, Z) nie są monitorowane.