
Doprowadzanie zasilania do sterownika
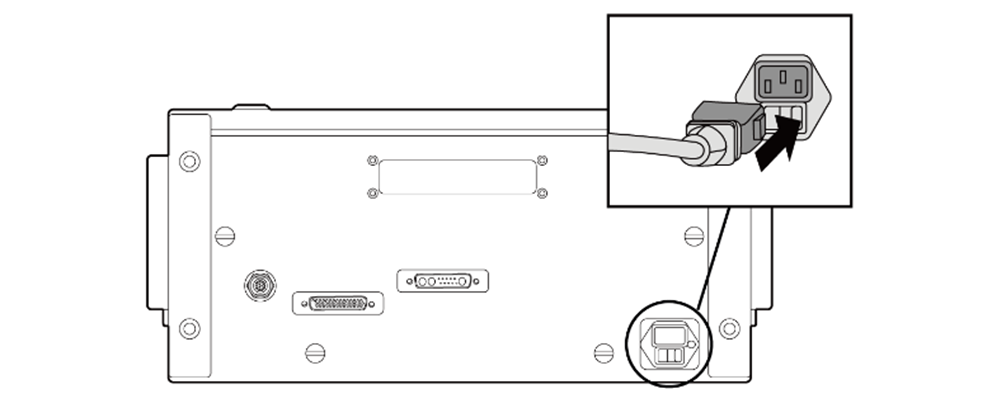
Aby doprowadzić zasilanie do sterownika, należy podłączyć kabel zasilający sterownika do standardowego gniazda zasilania IEC.
- Należy użyć kabla ze standardową wtyczką dopasowaną do gniazda w kraju eksploatacji.
- Aby mieć pewność, że kabel nie poluzuje się, należy wcisnąć wtyczkę do oporu w odpowiednie złącze sterownika do chwili, aż słyszalne będzie kliknięcie. Podłączyć standardową wtyczkę IEC C14 i odpowiednio dopasowany kabel IEC C13 (patrz niżej) do sterownika.
Ostrzeżenie
- Po podłączeniu kabla zasilającego należy się upewnić, że robot jest prawidłowo podłączony do masy (połączenie z masą). Zapewnić połączenie ze wspólną masą dla wszystkich urządzeń w systemie za pomocą nieużywanej śruby oznaczonej symbolem masy wewnątrz sterownika. Przewód masy musi spełniać wartość znamionową maksymalnego natężenia prądu systemu.
- Zabezpieczyć wejście zasilania sterownika za pomocą wyłącznika automatycznego.
- Nie zmieniać ani nie przedłużać kabla zasilającego. Może to spowodować pożar lub awarię sterownika.
- Przed zasileniem sterownika należy się upewnić, że wszystkie kable są podłączone prawidłowo. Należy stosować zawsze oryginalny kabel dołączony do produktu.
Uwaga
- Podczas konfigurowania systemu zalecamy zainstalowanie wyłącznika zasilania umożliwiającego równoczesne odłączenie zasilania od wszystkich urządzeń.
- Źródło zasilania musi spełniać minimalne wymagania dotyczące masy, uziemienia i wyłączników automatycznych. Specyfikacja elektryczna: (Jeśli wybrano opcjonalny sterownik, należy zapoznać się z instrukcjami zawartymi w załączniku)
- Jeśli napięcie wejściowe wynosi poniżej 180 V, ruch robota może być ograniczony w zależności od obciążenia i ruchu.
Parametr | Specyfikacja |
Input Voltage | 100 – 240 VAC |
Input Power Fuse (@100-240V) | 15 A |
Input Frequency | 47 – 63 Hz |