
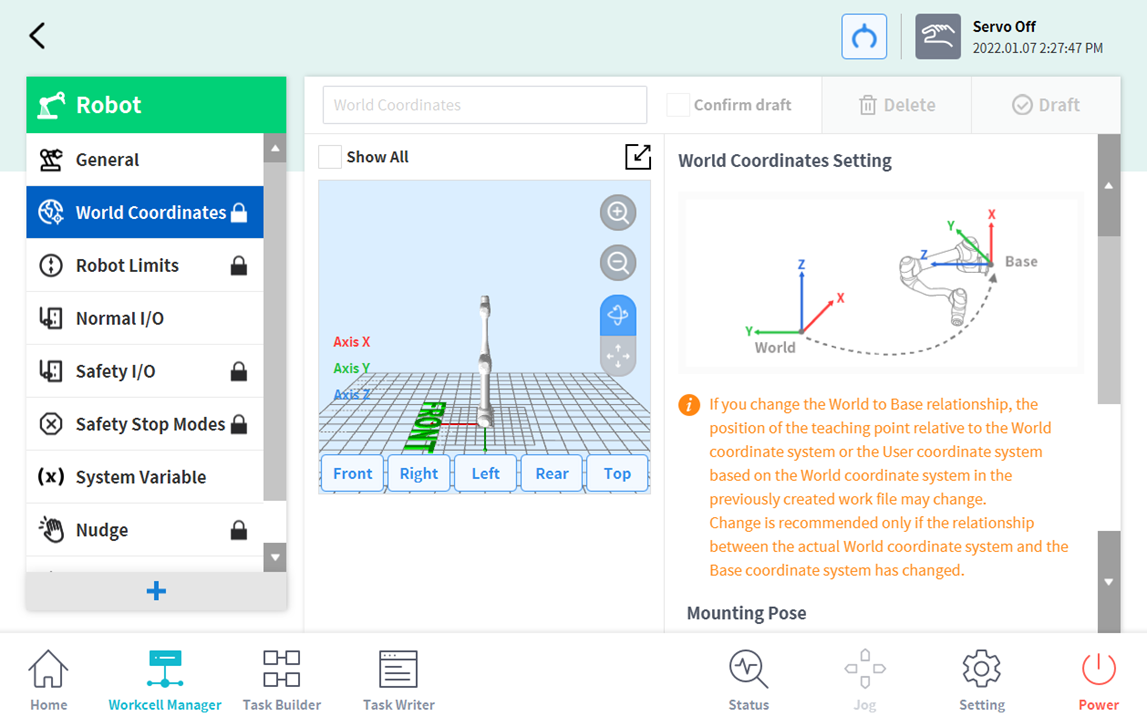
Ustawienia współrzędnych globalnych
W tym miejscu można ustawić układ współrzędnych robota i obrabianego przedmiotu. Ten układ współrzędnych nosi nazwę współrzędnych globalnych i różni się od współrzędnych podstawy, które są przyporządkowane na stałe do podstawy. Operator może ustawić pozycję współrzędnych podstawy za pomocą współrzędnych globalnych; współrzędne globalne można wybrać podczas uczenia i ruchu robota w Task Builder i Task Writer. Aby ustawić współrzędne globalne, należy dotknąć przycisku Add 
- Dotknąć przycisku Edit u góry.
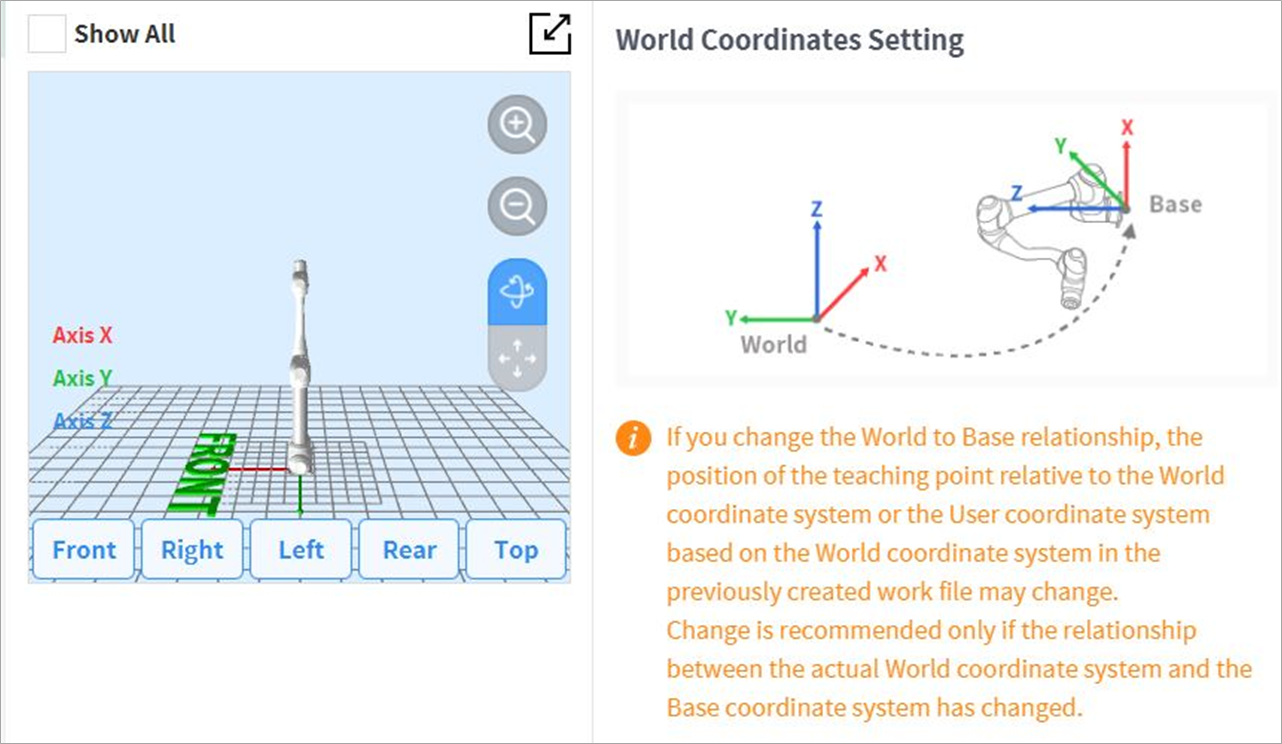
Należy skorzystać z rysunku przedstawiającego zależność między współrzędnymi globalnymi a współrzędnymi podstawy, a także pamiętać o odpowiednich środkach ostrożności.
Ostrzeżenie
Podczas zmiany zależności między współrzędnymi globalnymi i podstawy może dojść do zmiany punktu uczenia należącego do współrzędnych globalnych lub współrzędnych użytkownika na podstawie współrzędnych globalnych. Wprowadzanie zmian zaleca się wyłącznie przy zmianie rzeczywistej zależności między współrzędnymi globalnymi a współrzędnymi podstawy.
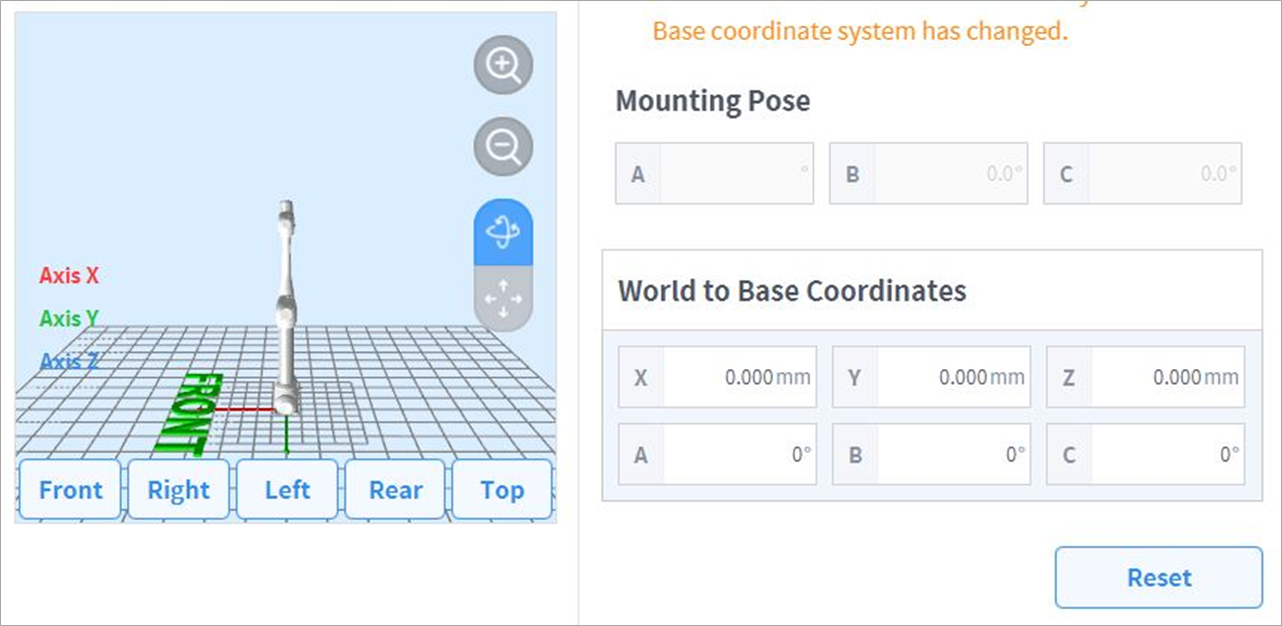
- Pozycja montażowa (nachylenie instalacyjne) jest wyświetlana pośrodku z prawej. Współrzędne globalne opisują środowisko pracy z perspektywy użytkownika, dlatego kierunek Z współrzędnych globalnych jest kierunkiem wskazującym sufit. Jako że jedna oś współrzędnych podstawy jest połączona na stałe z dolną płaszczyzną robota, zależność między współrzędnymi globalnymi a współrzędnymi podstawy zmienia się stosownie do lokalizacji/pozycji robota. Na potrzeby ilustracji zamieszczonej powyżej przyjęto, że robota zainstalowano na ścianie. W tym przypadku oś Z współrzędnych podstawy jest umieszczona prostopadle do ściany, co oznacza położenie równoległe do osi Y współrzędnych globalnych, a nachylenie pozycji montażowej i obrót są wyświetlane odpowiednio jako 90 i 0. Zależność między współrzędnymi globalnymi i współrzędnymi podstawy definiuje się jako zależność współrzędnych podstawy na podstawie współrzędnych globalnych. W przypadku z góry określonego rozmieszczenia elementów w środowisku roboczym należy ustawić współrzędne odpowiednio do rozmieszczenia. Wartości X/Y/Z odnoszą się do ruchu, a wartości A/B/C do obrotu na podstawie definicji kątów Eulera Z-Y-Z. Jeśli pozycja montażowa jest określana w sposób zgodny z pozycją instalacyjną robota, prawidłowym postępowaniem jest użycie kąta obrotu B/C jako pozycji montażowej B/C. Jeśli jednak pozycja montażowa jest ustawiona za pomocą funkcji Auto assumption, gdzie założona wartość może zawierać odchylenia, zaleca się korzystanie z kąta obrotu określonego zgodnie z danym rozmieszczeniem.
- Dotknąć przycisku Apply.
- Dotknąć przycisku Confirm.
Uwaga
Programy użytkownika utworzone za pomocą Task Builder i Task Writer po zastosowaniu wartości nachylenia montażu w wersjach oprogramowania sprzed GF020400 muszą bazować na współrzędnych globalnych z zastosowaniem wartości nachylenia montażu podczas aktualizowania do wersji oprogramowania po GF020400 i przeliczać wszystkie współrzędne podstawy na współrzędne globalne w programie użytkownika, aby móc prawidłowo wykorzystać istniejące punkty uczenia.
Jeśli wiele robotów pracuje we wspólnej przestrzeni roboczej lub jeśli robot jest zainstalowany na urządzeniu ruchomym, np. na podstawie mobilnej lub na torze liniowym, wtedy zależność i pozycja punktów uczenia między przedmiotem obrabianym a podstawą robota mogą ulec zmianie. W środowiskach tego typu należy ustawić współrzędne globalne, które są łatwe do nauczenia i łatwe udostępnienia.
Po zainstalowaniu lub wymianie narzędzia ciężar narzędzia musi zostać skonfigurowany przed użyciem robota. Aby uzyskać więcej informacji na temat ustawiania ciężaru narzędzia, zobacz Ustawienia ciężaru narzędzia.