Ustawienia strefy obniżenia czułości wykrywania kolizji
Aby ustawić strefę obniżenia czułości wykrywania kolizji, dotknij przycisku 
- Należy podać nazwę stanowiska roboczego w polu Workcell Name znajdującym się na górze ekranu Workcell Setting.
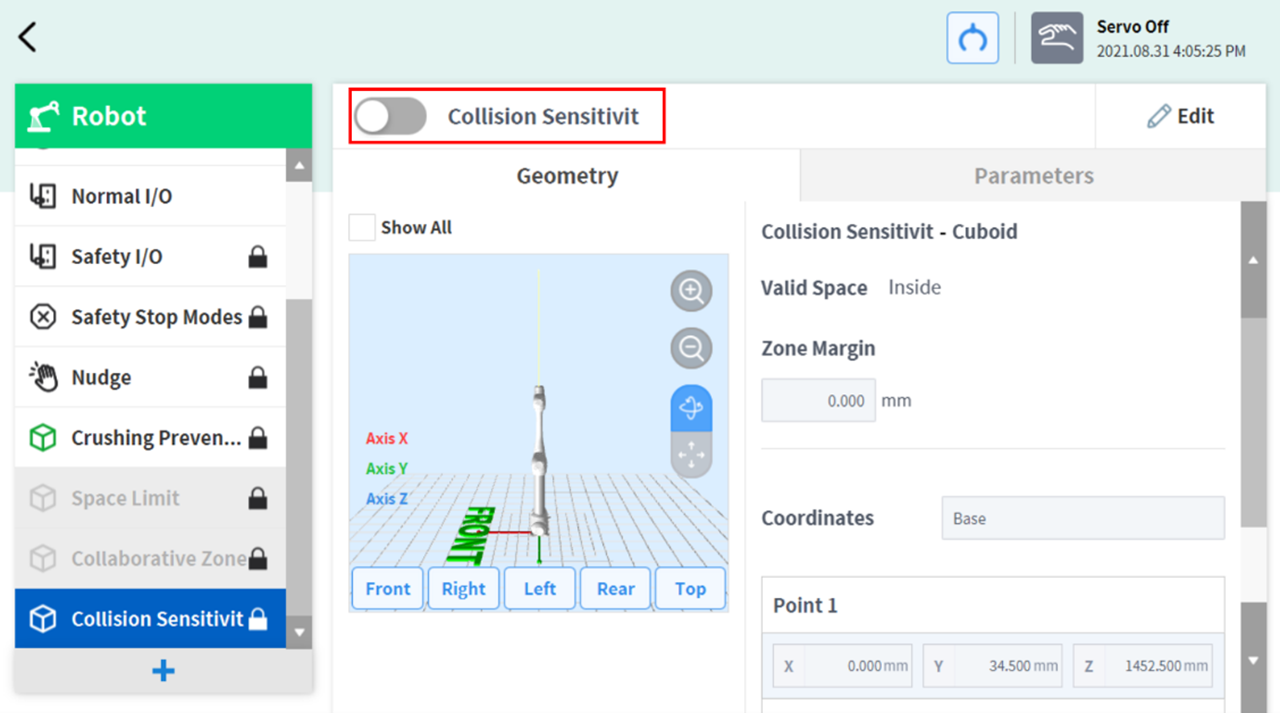
- Informacje o pozycji należy ustawić zgodnie z Zone shape oraz Valid Space i Zone Margin na karcie Geometry.
Ustaw override option, TCP/Robot Limits i Dynamic Zone Enable na karcie Parameters, a następnie naciśnij przycisk Draft.
Ostrzeżenie
- Strefa obniżenia czułości kolizji to strefa wysokiego priorytetu.
- Strefy wysokiego priorytetu są nadrzędne względem innych stref i globalnych limitów robota. Jeśli nakłada się wiele stref wysokiego priorytetu, funkcja bezpieczeństwa wykorzystuje NAJMNIEJ ograniczony limit bezpieczeństwa. Z tych powodów wielkość strefy wysokiego priorytetu powinna być określona jako możliwie najmniejsza w celu zapewnienia bezpieczeństwa.
- Sprawdź, czy wszystkie wyświetlane parametry są takie same jak te, które powinny być ustawione, a następnie zaznacz opcję Confirm draft i naciśnij przycisk Confirm.
- Naciśnij przycisk Activate Toggle, aby zastosować strefę obniżenia czułości kolizji.