
Ustawienia pozycji montażu robota
Robota można instalować pod dowolnym kątem. Aby skonfigurować pozycję montażu robota, należy dotknąć przycisku 
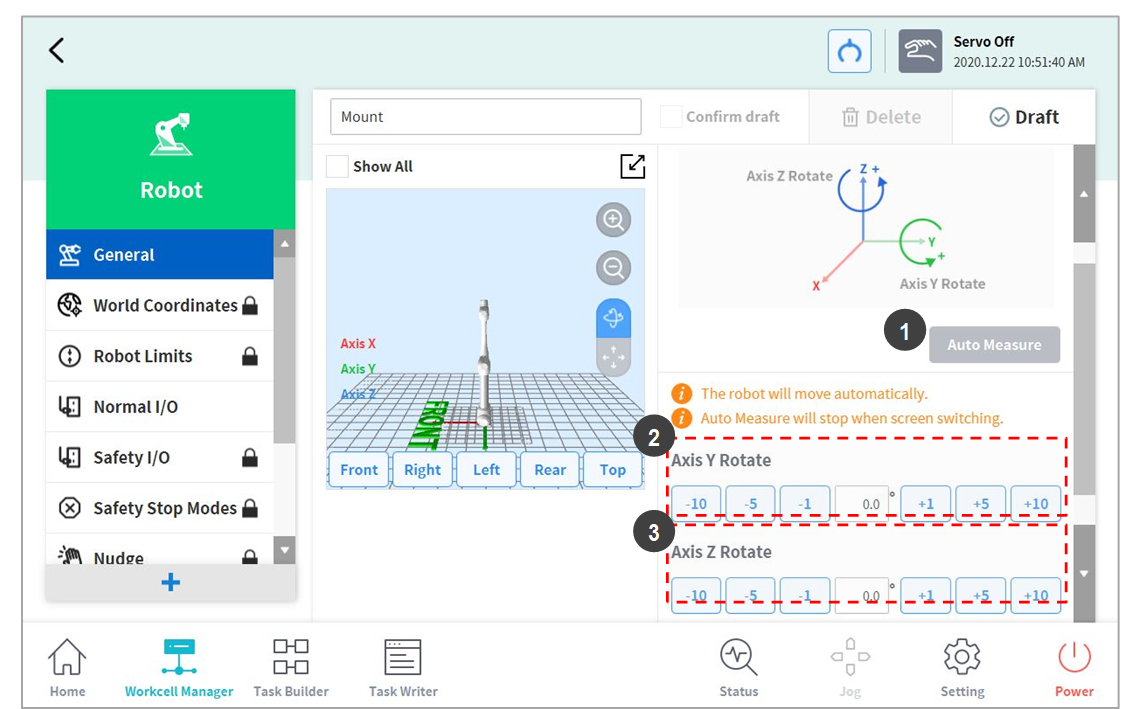
Lp | Element | Opis |
|---|---|---|
1 | Auto Calculate | Automatycznie oblicza kąt montażu robota. |
2 | Y-axis Rotation Setting | Wprowadź kąt osi Y robota podczas montażu. |
3 | Z-axis Rotation Setting | Wprowadź kąt osi Z robota podczas montażu. |
Uwaga
Dotknąć przycisku Auto Calculate, aby automatycznie obliczyć wartość. Operator może użyć funkcji Auto Calculate do pozycji montażu, jeśli podstawa robota jest nachylona o ponad 5 stopni względem podłoża. Funkcja Auto Calculate służąca do obliczania pozycji montażu robota umożliwia łatwą konfigurację pozycji instalacyjnej wymaganą przez bezpośrednie uczenie, funkcje Force Control (sterowania siłowego) i Compliance Control (sterowania podatnego) bez wprowadzania dokładnych wartości kątów instalacji, jednak dokładność automatycznie obliczonej bezwzględnej pozycji robota może być niższa od dokładnie zmierzonych wartości.
Ostrożność
Modele z serii H nie obsługują funkcji pozycji montażu robota. Montaż musi być wykonany na ziemi.