
Podłączanie we/wy sterownika
Do zacisku we/wy sterownika można podłączyć manipulator, programator ręczny oraz różne inne urządzenia zewnętrzne. Urządzenia peryferyjne przeznaczone do podłączenia obejmują zabezpieczenia, w tym przycisk zatrzymania awaryjnego, kurtynę świetlną i maty bezpieczeństwa, oraz urządzenia niezbędne do skonfigurowania komórki roboczej robota, w tym pneumatyczne zawory elektromagnetyczne, przekaźniki, sterowniki PLC i kodery przenośników taśmowych.
Na we/wy sterownika składa się sześć modułów:
- Listwa zaciskowa dla wejścia styku bezpieczeństwa (TBSFT): Służy do podłączania urządzeń wymaganych dla zatrzymania awaryjnego i zatrzymania ochronnego
- Listwa zaciskowa do zasilania cyfrowego we/wy (TBPWR):
- Konfigurowalny cyfrowy blok we/wy (TBCI1–4, TBCO1–4): Służy do podłączania urządzeń peryferyjnych wymaganych do użytkowania robota
- Listwa zaciskowa dla analogowego we/wy (TBAIO):
- Listwa zaciskowa wejścia kodera (TBEN1, TBEN2)
- Listwa zaciskowa dla wyjścia styku bezpieczeństwa (TBSTO): łączy się z linią zasilania urządzeń peryferyjnych robota, tak że gdy robot wchodzi w stan STO, zasilanie urządzeń peryferyjnych jest również wyłączane
Rysunek poniżej przedstawia układ połączeń elektrycznych wewnątrz sterownika.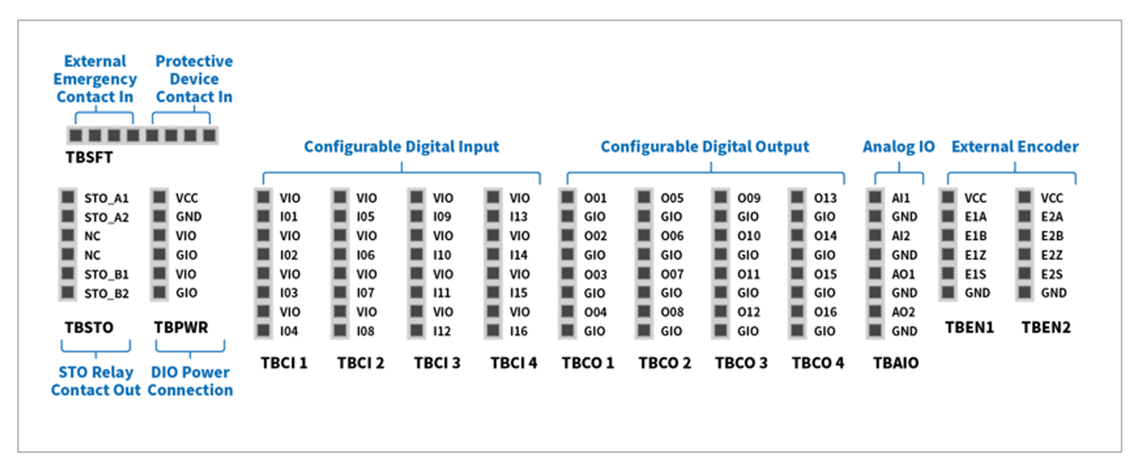
Przestroga
- Aby zapobiec uszkodzeniu produktu i awarii, podczas podłączania zacisków do we/wy sterownika należy wyłączyć zasilanie.
- Firma Doosan Robotics nie udziela rekompensaty za żadne uszkodzenia wynikające z nieprawidłowego podłączenia zacisków lub zaniedbań po stronie użytkownika.
- Należy pamiętać o wyłączeniu zewnętrznego źródła zasilania przy wyłączaniu zasilania sterownika.