
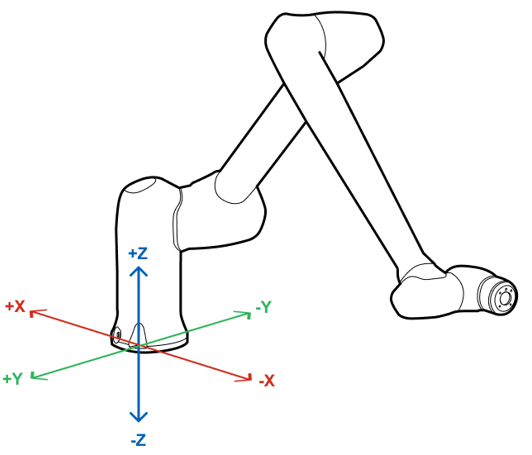
Wykonywanie na bazie podstawy robota
Aby robot wykonał ruch na bazie podstawy, należy:
Wybrać kartę Task na ekranie Jog.
Wybrać współrzędne wyświetlania do użycia jako podstawa i wybrać Base jako punkt odniesienia współrzędnych zadania.
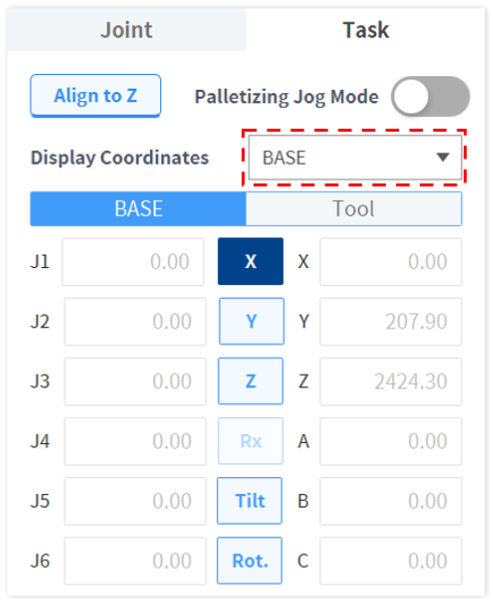
Wybrać Base Coordinates (Współrzędne podstawy), aby wykonać ruch. (Rx jest nieaktywny dla modeli serii P)
Nacisnąć i przytrzymać przycisk kierunku(


Uwaga
Obszar bezpieczeństwa nie ma zastosowania w trybie wirtualnym.