
Nazwy i funkcje
Manipulator
Nazwy części
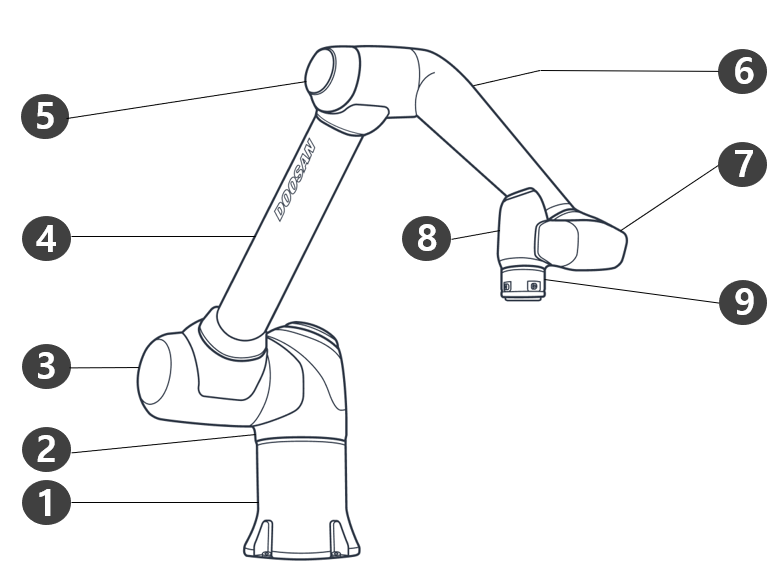
Lp | Nazwa | Lp | Nazwa |
|---|---|---|---|
1 | Base | 6 | Link2 |
2 | J1 | 7 | J5 |
3 | J2 | 8 | J6 |
4 | Link1 | 9 | Tool Flange |
5 | J3 | 10 |
Najważniejsze funkcje
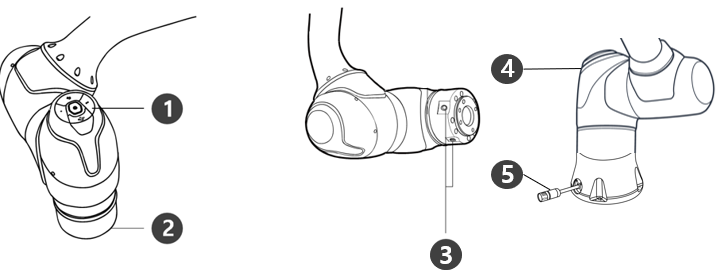
Lp | Element | Opis |
|---|---|---|
1 | Cockpit | [Opcja] Sterownik używany do bezpośredniego uczenia i obsługi. |
2 | Tool flange | Miejsce montażu narzędzi. |
| 3 | Flange I/O | Gniazdo we/wy do sterowania narzędziem. (Wejście cyfrowe 3-kan., wyjście 3-kan.) |
4 | LED | Wyświetla stan robota za pomocą różnych kolorów. |
5 | Connector | Służy do zasilania robota i komunikacji z nim. |
Sterownik
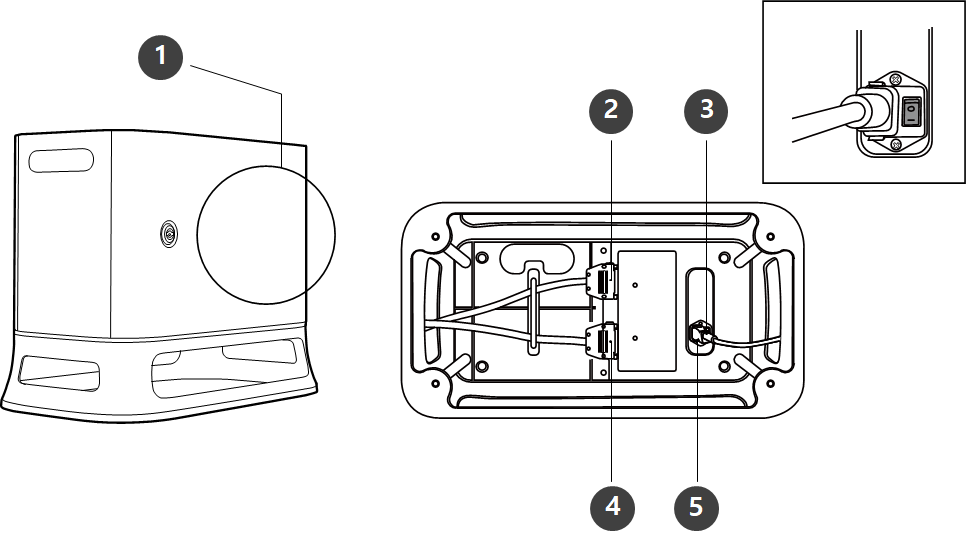
Lp | Element | Opis |
|---|---|---|
1 | I/O connection terminal (internal) | Służy do podłączania sterownika lub urządzeń peryferyjnych. |
2 | Teach pendant cable connection terminal | Służy do podłączania przewodu programatora ręcznego do sterownika. |
3 | Power switch | Służy do włączania/wyłączania głównego zasilania sterownika. |
4 | Manipulator cable connection terminal | Służy do podłączania kabla manipulatora do sterownika. |
5 | Power connection terminal | Służy do podłączania zasilania sterownika. |
Uwaga
- Jeśli wybrano opcjonalny sterownik, należy zapoznać się z informacjami na temat podłączania kabli zawartymi w załączniku.