
Ekran trybu rzeczywistego: Karta z informacjami o efektorze końcowym
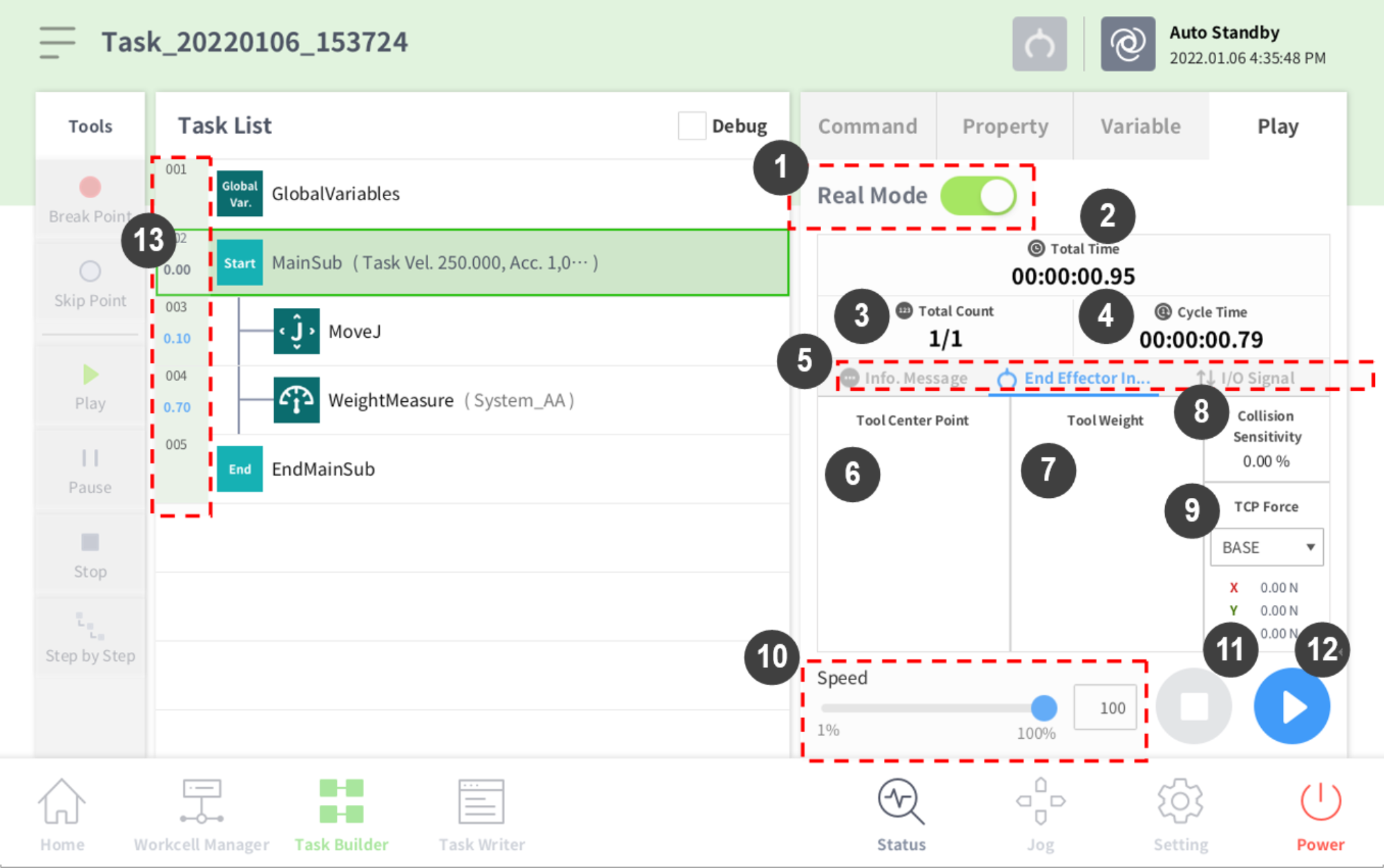
Karta z informacjami o efektorze końcowym na ekranie trybu rzeczywistego Task Builder ma następującą strukturę:
Lp | Element | Opis |
1 | Real Mode ( | Służy do ustawiania trybu testowego robota.
|
2 | Total time | Wyświetla całkowity czas, jaki upłynął od uruchomienia zadania. |
3 | Total count | Wyświetla całkowitą liczbę wykonań zadania. |
4 | Average execution time | Wyświetla średni czas, jaki upłynął podczas wykonywania jednego cyklu zadania na liście zadań. |
5 | Information Screen Shift Tab | Możesz przełączać się między ekranem wiadomości z informacjami o robocie, ekranem informacji o efektorze końcowym i ekranem informacji o wejściu/wyjściu.
|
6 | Tool center point information area | Wyświetla informacje o punkcie środkowym narzędzia ustawione na podstawie funkcji punktu środkowego narzędzia oraz konfiguracji ciężaru ustawionego polecenia TCP lub impulsowania. |
7 | Tool weight information | Wyświetla informacje o ciężarze narzędzia ustawione na podstawie funkcji punktu środkowego narzędzia oraz konfiguracji ciężaru ustawionego polecenia TCP lub impulsowania. |
8 | Collision information area | Wyświetla wartość czułości kolizji ustawioną dla obszaru, w którym znajduje się robot w danym momencie. |
9 | Force information area | Wyświetla informacje o sile występującej w układach współrzędnych: bazowym, światowym, użytkownika i referencyjnym. Referencyjny układ współrzędnych pokazuje siłę na podstawie informacji o układzie współrzędnych zastosowanym do robota. |
10 | Speed slider | Służy do ustawiania prędkości robota w trybie rzeczywistym lub wirtualnym. |
11 | Stop button | Zatrzymanie bieżącego zadania. |
12 | Execute/pause toggle button | Wykonuje lub wstrzymuje pracę z listy zadań. |
13 | Time | Wyświetla czas poświęcony odpowiedniemu poleceniu/umiejętności. |

Przestroga