
Ustawienia punktu środkowego narzędzia (TCP)
Podczas konfigurowania punktu środkowego narzędzia (TCP) należy również zdefiniować położenie i kąt obrotu w oparciu o współrzędne kołnierza. Odległość od domyślnego punktu początkowego współrzędnej kołnierza do punktu środkowego narzędzia (TCP) w kierunkach X, Y i Z nie może być większa niż 10000 mm. Dodatkowo, jeśli przeliczone długości ( 
W szczególności, jeśli TCP jest skonfigurowany przy użyciu funkcji Auto Calculate, obliczenia dokonywane są wyłącznie na podstawie pozycji X, Y i Z, dlatego konieczne jest wprowadzenie kąta obrotu. Kąt obrotu można zdefiniować za pomocą pozycji A, B i C i opiera się on na metodzie obrotu Eulera Z-Y-Z.
Definicje osi współrzędnych wyrażone za pomocą x, y, z oraz osi współrzędnych wyrażone za pomocą X, Y, Z:
- Oś współrzędnych „Flange Coordinate” (x, y, z): Kierunek osi współrzędnych określony na końcu kołnierza jest identyczny ze współrzędnymi robota przy kącie przegubu robota (0,0,0,0,0,0).
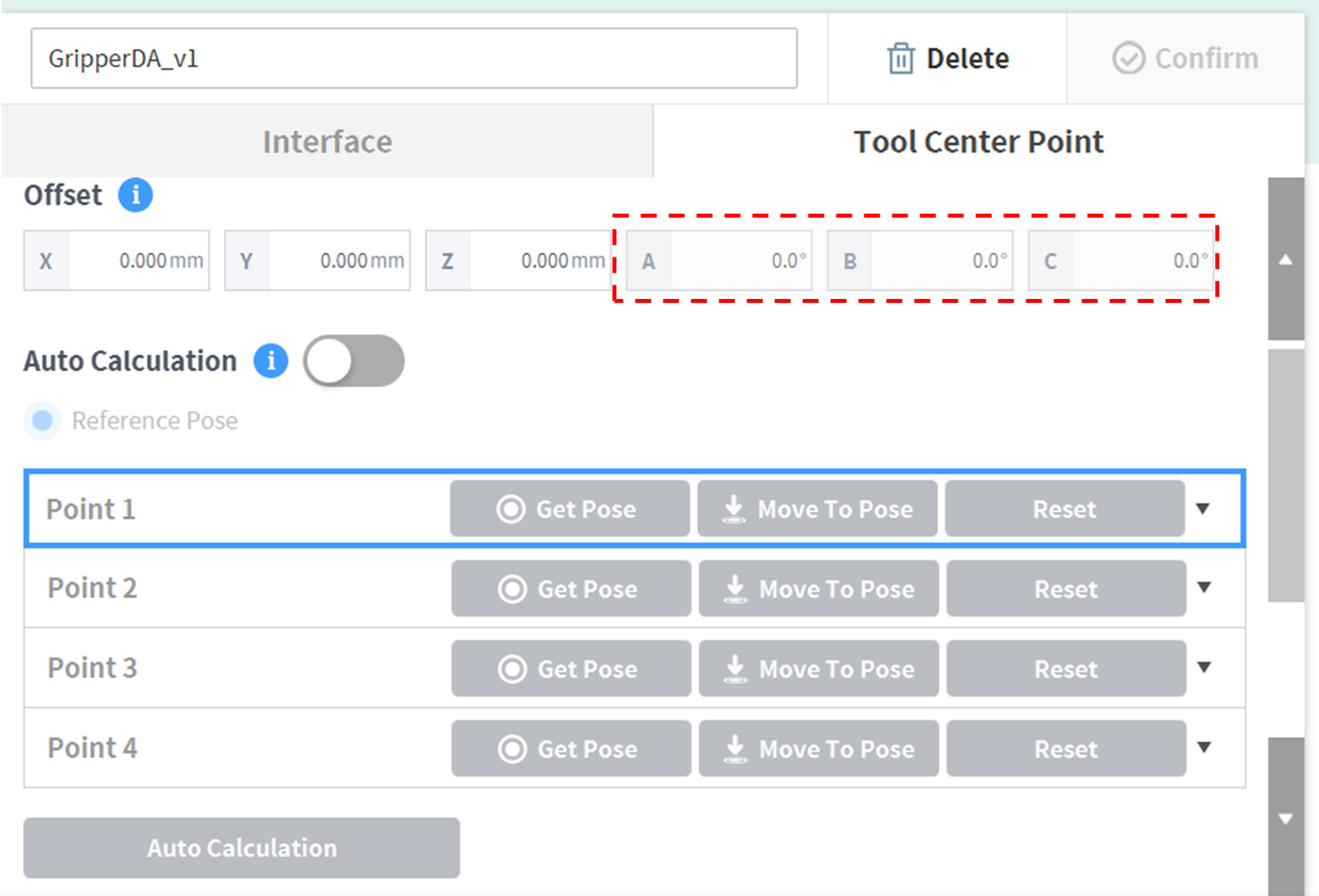
- Oś współrzędnych „TCP Coordinate” (X, Y, Z): Oś współrzędnych jest definiowana na końcu narzędzia zainstalowanego na końcu kołnierza lub punktu roboczego. Kąt obrotu „TCP Coordinate” określa się na podstawie „Flange Coordinate” w następującej kolejności od 1) do 3):
1) Obrócić o A stopni wzdłuż osi z Flange Coordinate (współrzędnej kołnierza).
2) Obrócić o B stopni wzdłuż osi y’ współrzędnej obróconej zgodnie z 1)
3) Obrócić o C stopni wzdłuż osi z’’ współrzędnej obróconej zgodnie z 2)
W tym miejscu podano kilka przykładów konfigurowania TCP zgodnie z metodą opisaną powyżej:
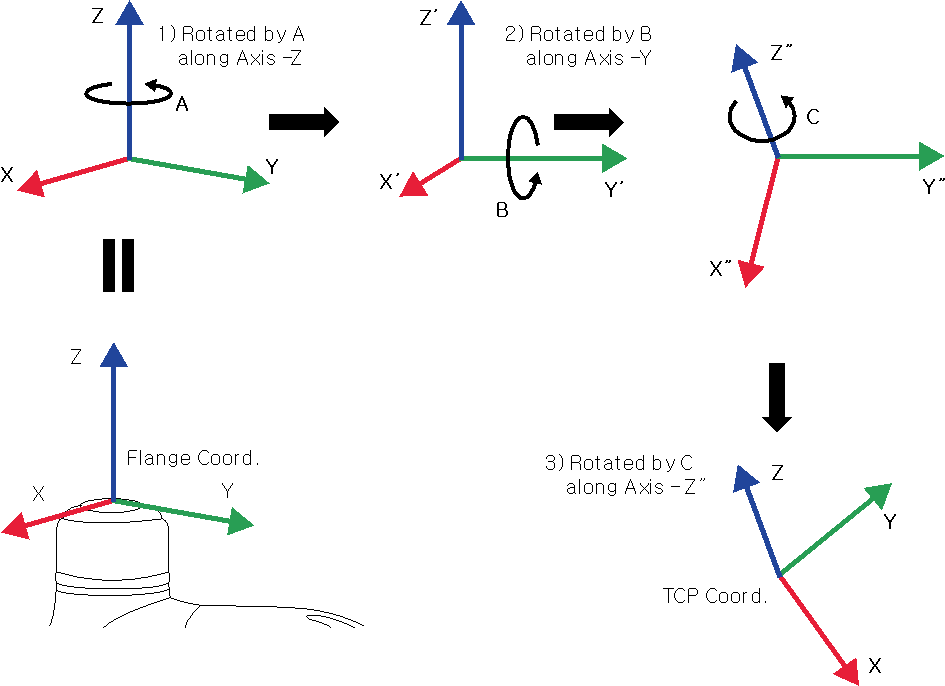
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Ogólny chwytak z przesunięciem w kierunku Z (TCP Coord)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: Lewy chwytak pod kątem 45 stopni (TCP Coord. L)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: Prawy chwytak pod kątem 45 stopni (TCP Coord. R)