Zrozumienie zgodności/kontroli siły
OPCJONALNIE CIĘŻKO 20 MIN
Sterowanie siłą i kontrola podatności to funkcje sterujące siłą robota. Funkcje te sterują również ruchem i wymuszaniem sterowania ruchem, jeśli dodano polecenie ruchu. Kontrola zgodności i kontrola siły hamowania różnią się w następujący sposób:
- Kontrola zgodności
- Podczas kontroli zgodności robot jest zgodny z siłą zewnętrzną na końcu TCP robota, a po usunięciu siły zewnętrznej zostaje utworzona siła, która przywraca robota do jego pierwotnej pozycji, co powoduje, że robot przemieszcza się do odpowiedniej pozycji.
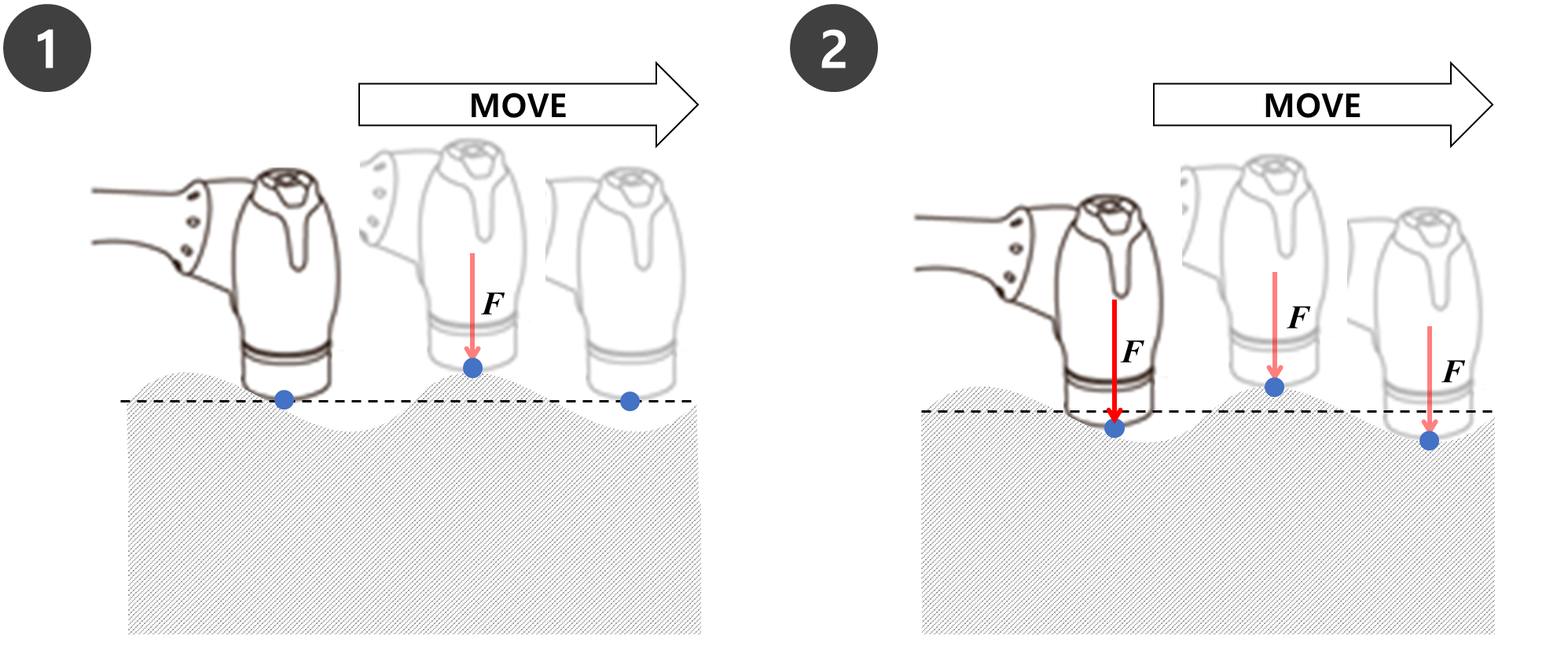
- It może być używany, gdy ruch liniowy jest wymagany na nierównej powierzchni bez uszkodzenia robota i powierzchni. It może służyć do zapobiegania nieoczekiwanym kolizjom wokół obrabianego przedmiotu.
- Kontrola siły
- Podczas kontroli siły na końcu protokołu TCP robota jest generowana siła. Przyspieszenie jest generowane w kierunku, w którym siła jest generowana, tak więc robot porusza się w kierunku ruchu, jak również w kierunku siły w tym samym czasie.
- Kiedy kontakt jest wykonany z obiektem, siła będzie zastosowana na obiekcie do momentu, gdy siła ustawiona i siła odpychająca obiektu tworzą równowagę.
- It może być użyty, gdy wymagana jest jednakowa siła na ruchu liniowym na nierównej powierzchni. It może być stosowany w zadaniach wymagających stałej siły podczas ruchu, takich jak polerowanie.
Uwaga
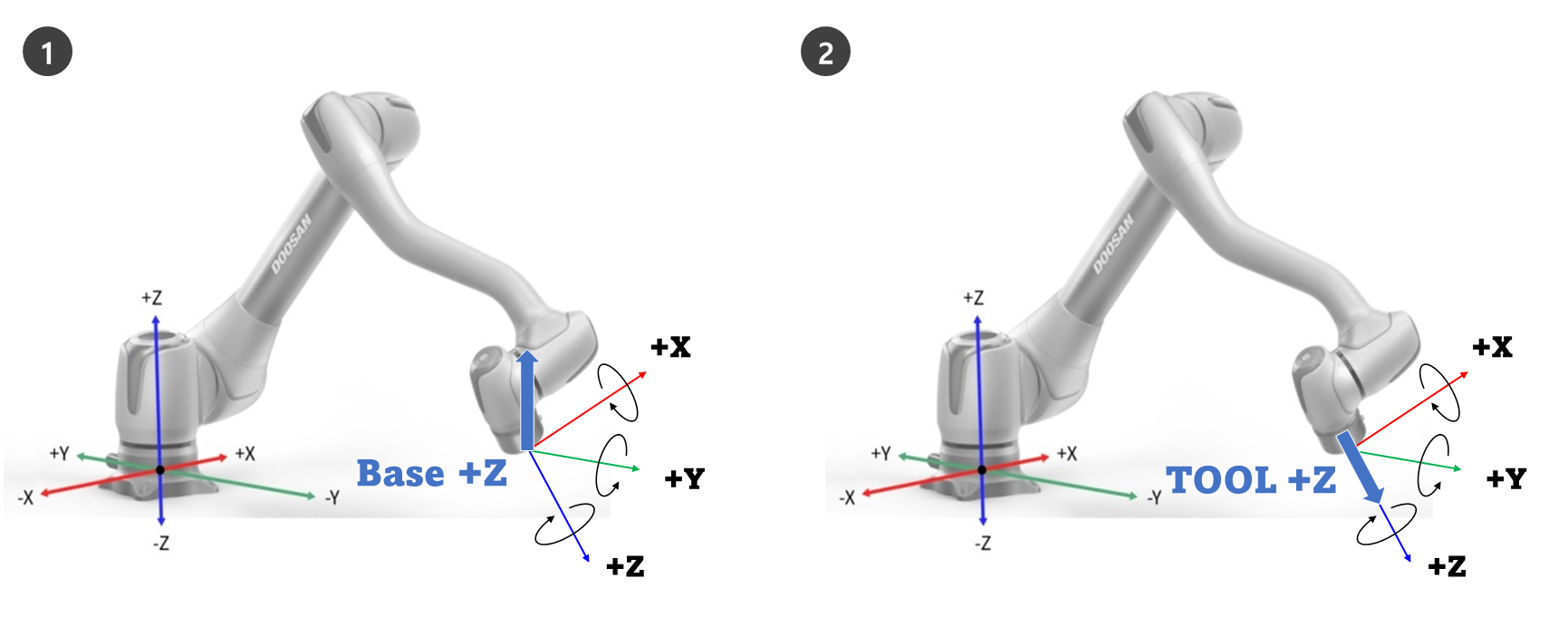
Polecenia zgodności i siły są wykonywane w oparciu o bieżące współrzędne. Domyślną współrzędną zadania są współrzędne bazowe, a współrzędne można zmienić za pomocą polecenia Set.
- Rys. 1 jest kierunkiem działania, gdy na współrzędne bazowe stosowana jest kontrola siły/zgodności w kierunku +Z.
- Rys. 2 jest kierunkiem działania, gdy na współrzędne narzędzia jest stosowana kontrola siły/zgodności w kierunku +Z.
Kontrola zgodności

Kontrola zgodności to funkcja, która spełnia wymagania siły zewnętrznej zgodnie z ustawioną sztynością, gdy siła jest zastosowana na końcu TCP robota. It równoważy siły w punkcie docelowym i jest to metoda kontroli, która generuje siłę odpychającą, jeśli przemieszczenie występuje poza punktem równoważenia. Podczas kontroli zgodności robot odbija się jak sprężyna.
- Jeśli kolizja zostanie wykonana w przypadku używania samego sterowania ruchem, może dojść do uszkodzenia obiektu, który uległ kolizji.
- Roboty Doosan Robotics zatrzymują się bezpiecznie w przypadku wystąpienia kolizji, ale w zależności od ustawień użytkownika, takich jaklimity bezpieczeństwa > czułość kolizji, mogą wystąpić następujące sytuacje.
- Jeśli podczas kontroli ruchu funkcja kontroli zgodności zostanie włączona, robot będzie się poruszał, gdy będzie się przylegał do obiektu, który został kolizji.
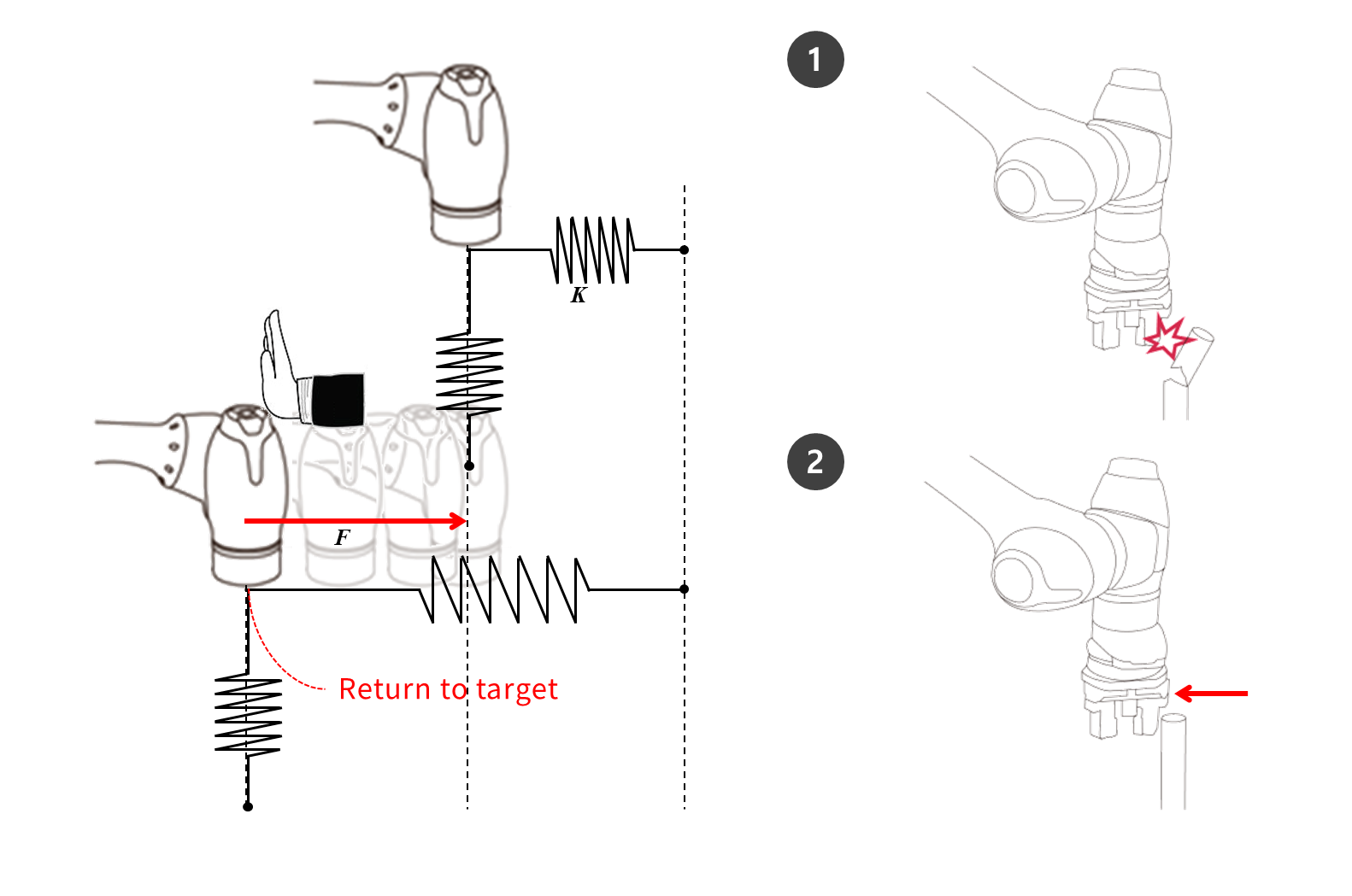
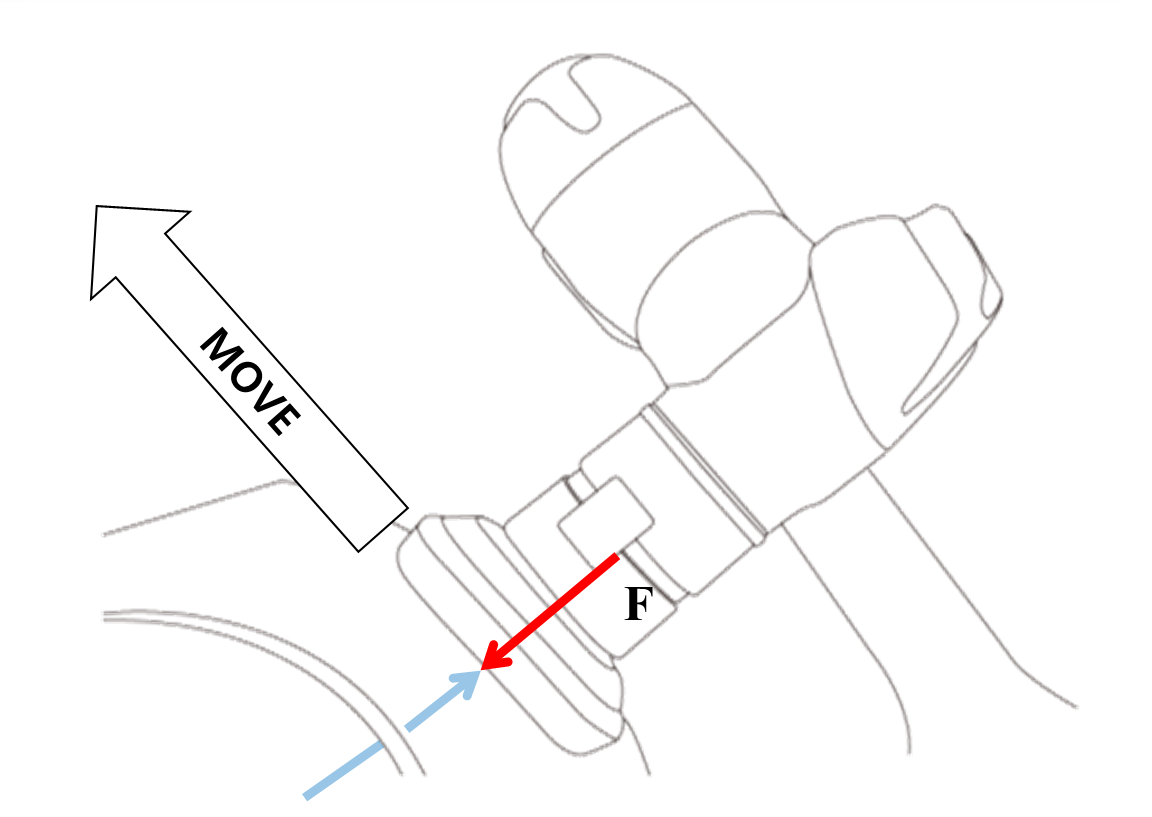
Jeżeli F jest siłą zewnętrzną, K jest sztyłością, a X jest odległością, to następujące wzory są prawdziwe.
- F = K * X.
- K = F / X.
- X = F / K.
W oparciu o powyższe wzory, jeśli sztywność kontroli podatności jest ustawiona na 1000N/m i jeśli robot porusza się 1 mm, generowana siła zewnętrzna wynosi 1N.
- F=1000 N/m*0.001 m=1 N (0.001 m=1 mm)
Uwaga
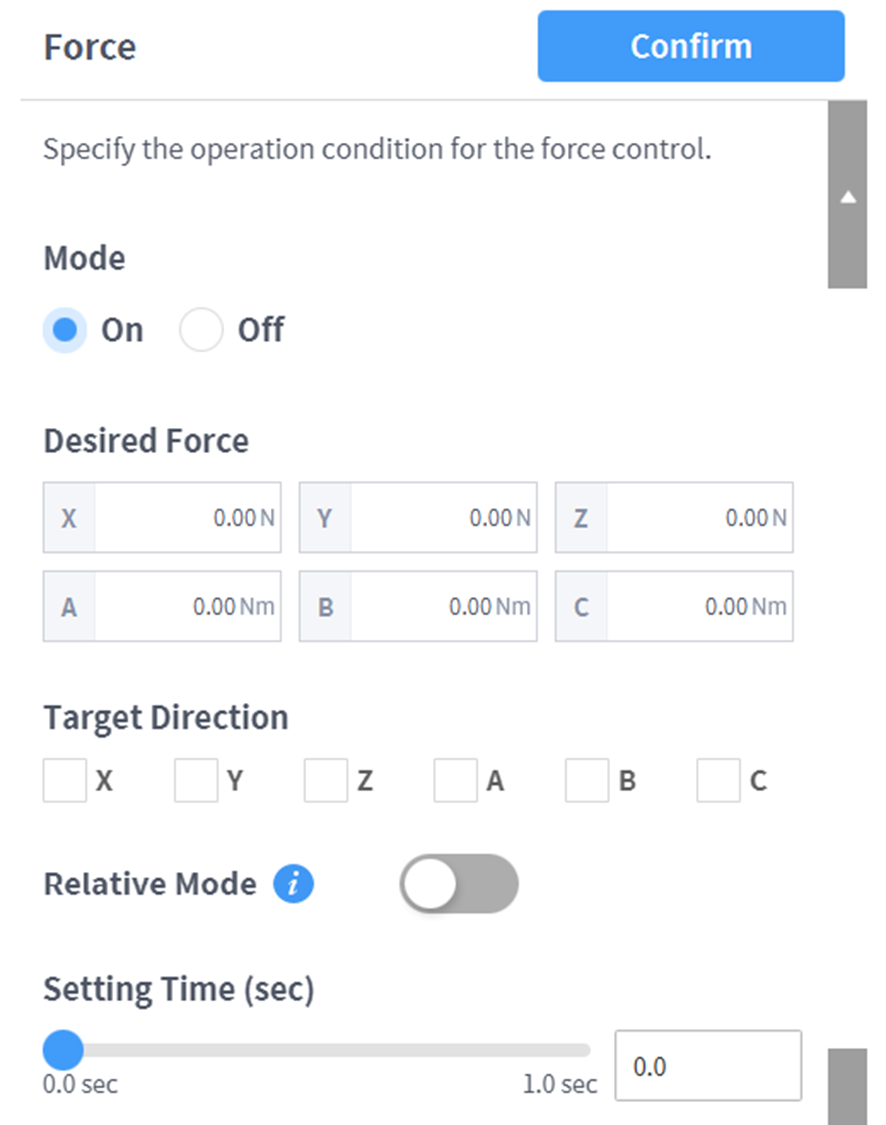
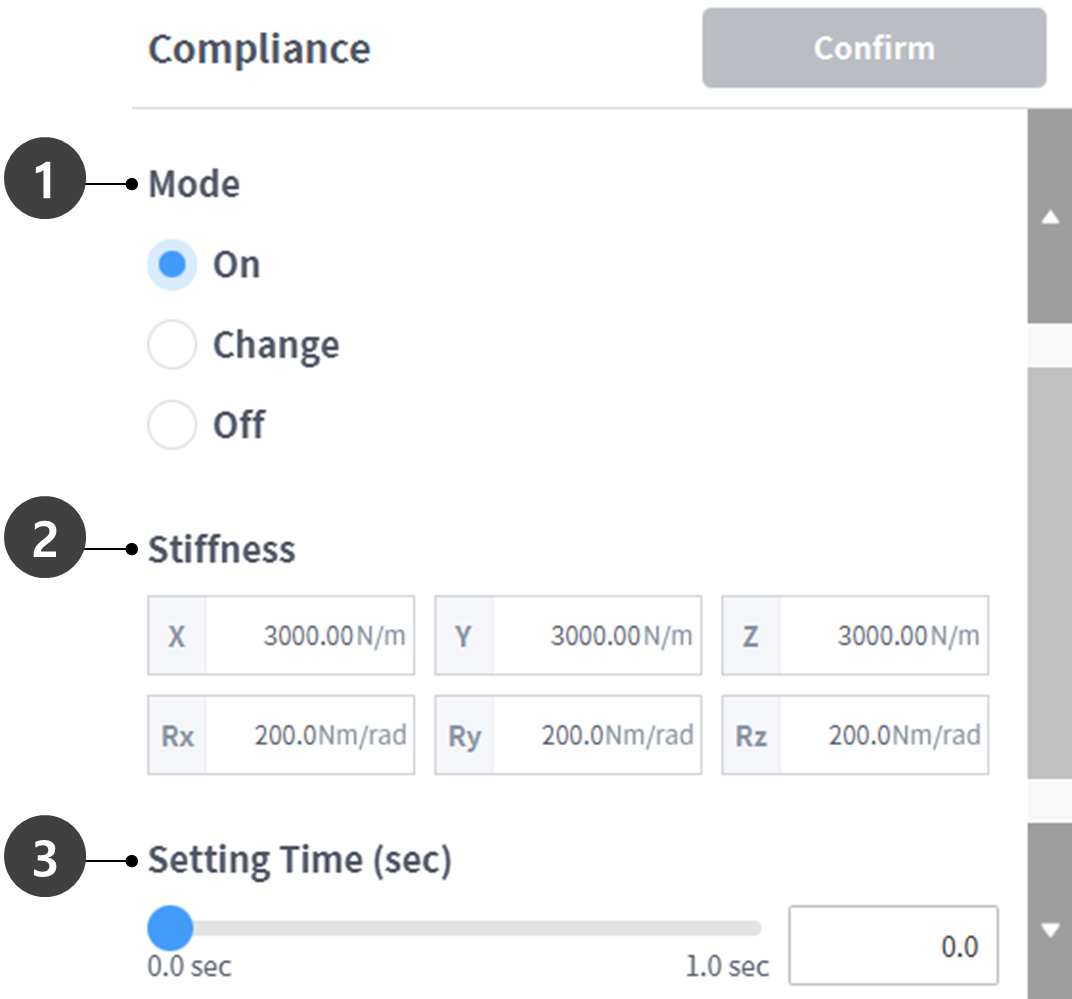
W oknie Property of zgodności można ustawić następujące wartości:
- Tryb
- WŁ.: Umożliwia kontrolę zgodności
- Zmień: Jeżeli tryb zgodności jest ustawiony na Wł., zmienia się on na sztywnosc
- Wył.: Wyłącza kontrolę zgodności
- Zakres sztywnosc
- M/H Series : Translation(0~20000N/m), Rotation(0~1000Nm/rad)
- A Series : Translation(0~10000N/m), Rotation(0~300Nm/rad)
- Niższe wartości sztywności będą bardziej łagodnie reagować na siłę zewnętrzną i będą wymagały więcej czasu na powrót do punktu docelowego
- Ustawianie czasu
- It to czas wymagany dla bieżącej wartości sztywności do osiągnięcia ustawionej wartości sztywności (0-1s)
PRZESTROGA
- Waga narzędzia i TCP (Punkt środkowy narzędzia) muszą być dokładnie ustawione. Niedokładna waga narzędzia może spowodować, że robot wykryje ciężar narzędzia jako siłę zewnętrzną, a włączenie polecenia zgodności spowoduje błąd pozycji.
- Napięcie zestawu ubraniowego może spowodować wytworzenie zewnętrznego momentu obrotowego na robocie. Dlatego należy zachować ostrożność podczas instalowania pakietu sukienki.
- Nie można włączyć ani wyłączyć zgodności podczas wykonywania ruchu asynchronicznego lub mieszania.
- Podczas wykonywania polecenia zgodności na, dozwolony jest tylko ruch liniowy. Wspólne ruchy, takie jak MoveJ i MoveSJ, nie są dozwolone.
- W przypadku włączenia polecenia zgodności nie można zmienić wagi narzędzia ani TCP.
- Podczas wykonywania polecenia zgodności w trybie włączenia możliwe jest niedokładne dotarcie do punktu docelowego ze względu na zgodność momentu obrotowego generowanego podczas wykonywania ruchu. Dlatego zaleca się włączenie kontroli zgodności w pobliżu punktu docelowego. Można również zminimalizować błąd pozycji poprzez ustawienie dużej wartości sztywności.
Sterowanie siłą

Sterowanie siłą jest funkcją, która przykłada siłę w kierunku sterowania siłą, dopóki ustawiona siła i siła odpychająca nie tworzą równowagi
- It przesuwa robota w kierunku nastawionej siły, a jeśli kontakt z obiektem zostanie wykonany, zachowuje on wprowaną siłę (N)
- It jest w stanie sterować ruchem w kierunku innym niż kierunek siły podczas stosowania stałej siły
- Minimalne ustawienie to +/- 10N i można je dostroić z rozdzielczością 0,2N
- Funkcja kontroli siły nie jest dostępna w strefie osobliwości
- Ogólnie rzecz biorąc, kontrola zgodności jest stosowana w połączeniu z kontrolą siły, tak aby kontrola siły działała zgodnie z siłą zewnętrzną
Uwaga
Z właściwości polecenia siły można ustawić następujące wartości.
- Tryb
- WŁ.: Włącza sterowanie siłą
- Wył.: Wyłącza sterowanie siłą
- Żądany zakres siły
- X, Y, Z: 10 - (maksymalnie każdy robot) N.
- A, B, C: 5 - (maksimum każdego robota) Nm
- Aby uzyskać więcej informacji na temat maksymalnej siły, patrz (2.11.0.1_temp-pl_PL) Górny/dolny zakres progowy i wartości domyślne parametrów bezpieczeństwa.
- Kierunek docelowy
- It przenosi się do wybranej wartości docelowej dla każdego kierunku.
- Można dokonać wielu wyborów.
- Sterowanie siłą może być wykonywane tylko przy ustawieniu kierunku po ustawieniu siły.
- Jeśli jeden z wielu wybranych kierunków osiągnie siłę docelową, będzie się on poruszał aż do osiągnięcia wartości docelowej dla drugiego kierunku.
- Tryb względny
- Jeśli ten tryb jest włączony, kalibruje on siłę zewnętrzną przyłożonej do robota do 0, aby poprawić dokładność kontroli siły.
- Gdy tryb względny jest wyłączony, rzeczywista siła przykładana do celu jest równa sumie siły ustawionej i siły zewnętrznej.
- Gdy włączony jest tryb względny, rzeczywista siła przyłożenia do celu jest równa ustawionej sile.
- Podczas kontroli siły może wystąpić odchylenie w zależności od siły pose lub zewnętrznej.
- Podczas kontroli siły możliwe jest nieosiągnięcie dokładnego punktu docelowego. Dlatego zaleca się włączenie kontroli siły w pobliżu punktu docelowego.
- Jeśli ten tryb jest włączony, kalibruje on siłę zewnętrzną przyłożonej do robota do 0, aby poprawić dokładność kontroli siły.
- Ustawianie czasu
- It to czas wymagany do osiągnięcia przez bieżącą wartość siły ustawionej (0-1s)