
Przyciski na kokpicie (pięć przycisków)
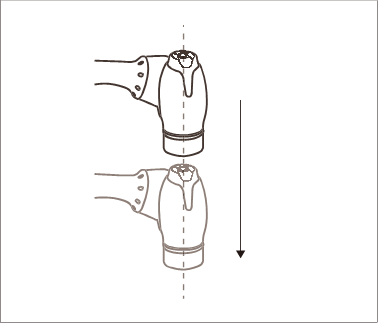
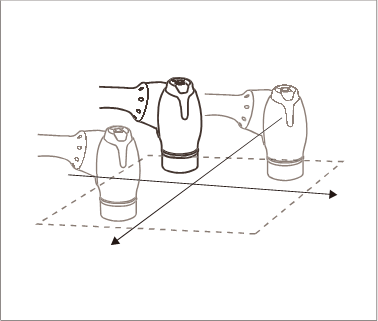
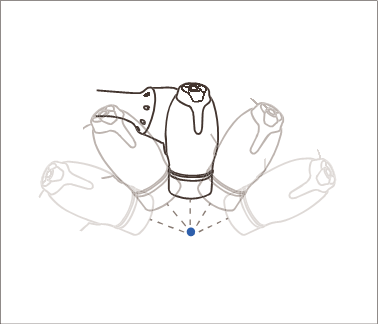
Użytkownik może zmieniać pozycję robota, przytrzymując przycisk prowadzenia ręcznego lub przycisk użytkownika na kokpicie.
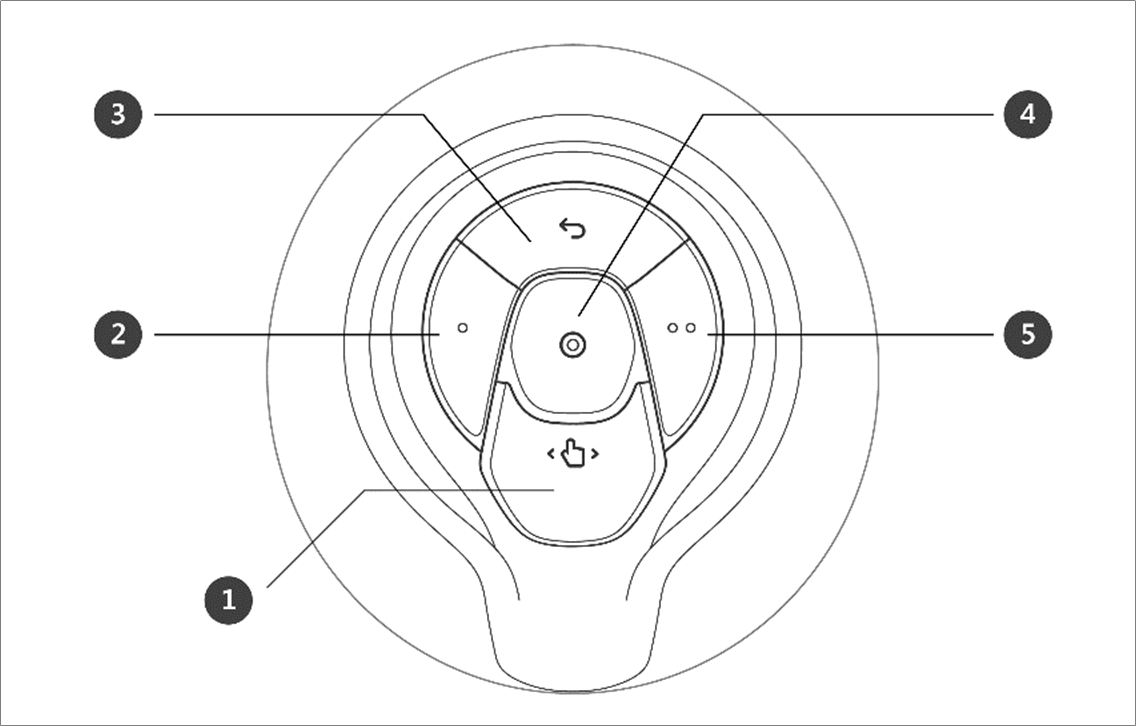
No. | Element | Opis |
|---|---|---|
1 | Hand-Guiding Button | Przycisk służy do regulacji lub zmiany pozycji robota. |
2,5 | Przycisku ustawień użytkownika | Za pomocą tego przycisku można zmieniać pozycję robota, podając pozycję zgodnie ze stanem blokady odpowiadającej trybowi.
 Zobacz „(2.12.2-pl_PL) Ustawienia kokpitu", aby uzyskać więcej informacji na temat tych ustawień. |
3 | Cancel Button | Usuwa ostatnio zapisaną pozycję. |
4 | Save Pose Button | Zapisuje bieżącą pozycję robota. Aby uzyskać więcej informacji, zobacz „(2.12.2-pl_PL) Ustawianie punktu roboczego polecenia umiejętności za pomocą przycisków kokpitu" |