
Przejście do pozycji początkowej
Ta funkcja służy do wykonania ruchu robota do domyślnego położenia spoczynkowego lub położenia spoczynkowego określonego przez użytkownika skonfigurowanego w Settings w menu głównym.
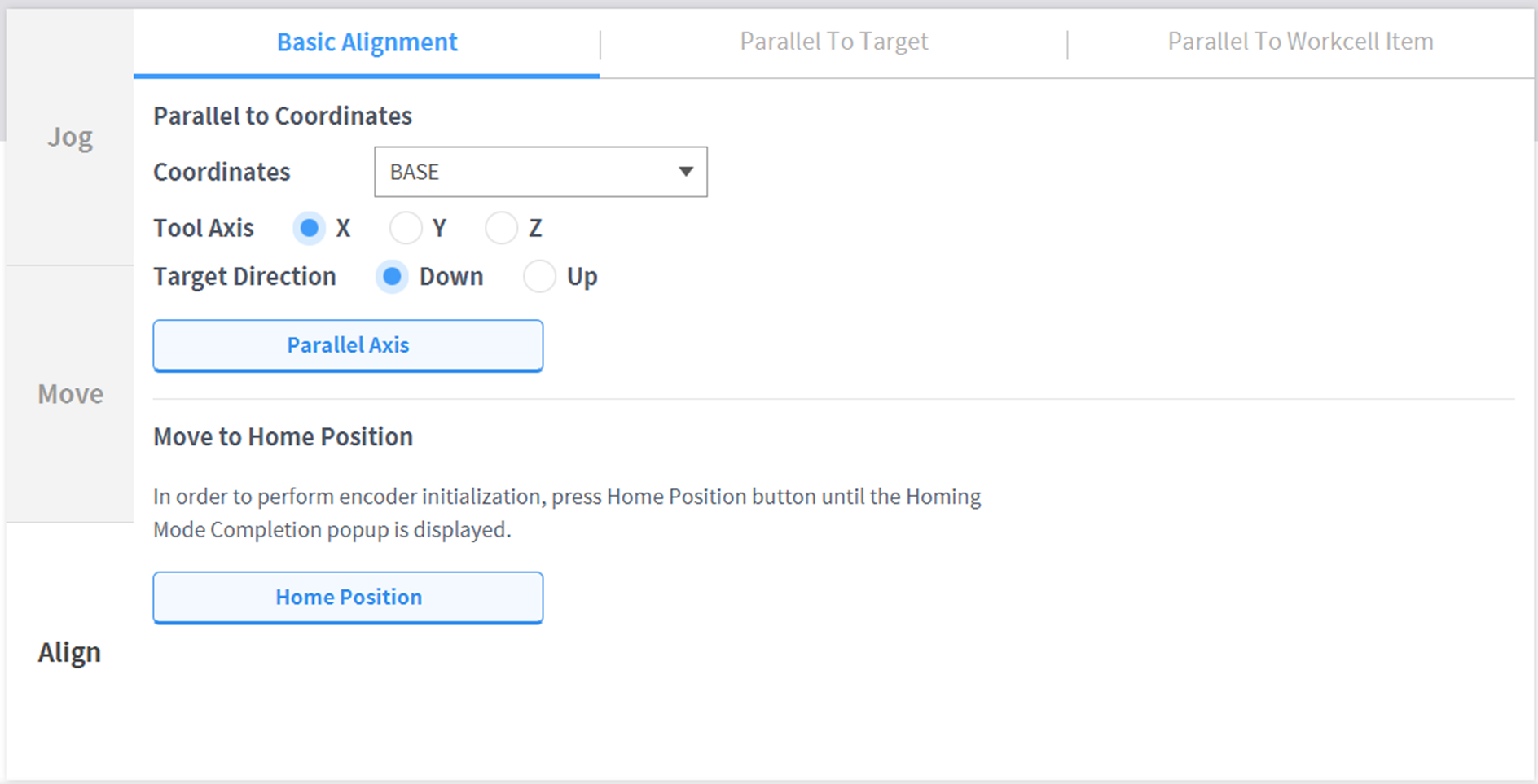
Wybrać kartę Align, a następnie kartę Basic Alignment.
Nacisnąć i przytrzymać przycisk „Home Position”, aby przestawić robota do położenia spoczynkowego.
Ostrzeżenie
Gdy robot lub staw robota jest zamieniany, pozycja domowa użytkownika musi zostać zresetowana za pomocą pilota do nauki.
Podczas wykonywania kopii zapasowej/przywracania należy zresetować pozycję domową użytkownika na pilocie do nauki.
Ustawienie pozycji domowej użytkownika w programie DART Studio nie jest odzwierciedlane na pilocie do nauki. Jeśli pozycja domowa użytkownika jest ustawiana za pomocą programu DART Studio, a następnie używana z pilotem do nauki, pozycja domowa użytkownika musi zostać zresetowana.