Opis produktu (CS-06)
Nazwy i funkcje
Sterownik DC (CS-06)
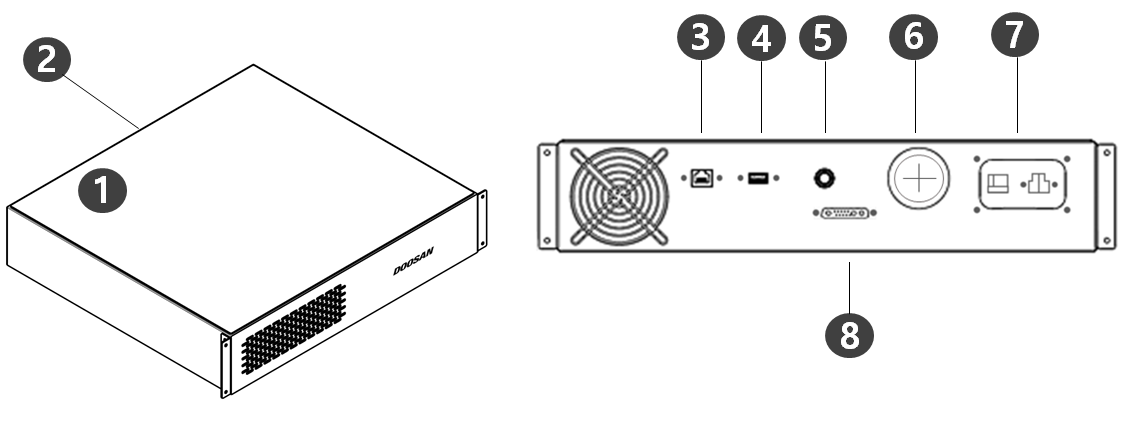
Lp. | Element | Opis |
1 | I/O connection terminal (internal) | Nie jest możliwe połączenie ze sterownikami innych robotów ani z sąsiednim wyposażeniem. |
2 | Emergency stop button and Smart Pendant connection terminal | Umożliwia to podłączenie kabla przycisku zatrzymania awaryjnego lub lokalnego panelu sterowania do sterownika. |
3 | Network connection terminal | Laptopy, urządzenia TCP/IP, urządzenia Modbus i czujniki wizyjne można podłączyć do zacisku złącza sieciowego znajdującego się wewnątrz sterownika. |
4 | USB connection terminal | Dzienniki generowane podczas pracy robota można zapisywać na urządzeniu pamięci masowej USB, a zadania można eksportować lub importować. |
5 | Emergency stop button and Smart Pendant connection terminal | Umożliwia to podłączenie kabla przycisku zatrzymania awaryjnego lub lokalnego panelu sterowania do sterownika. |
6 | External cable terminal | Terminal umożliwiający podłączenie urządzeń zewnętrznych. |
7 | Power connection terminal | Do podłączenia zasilania sterownika. |
| 8 | Manipulator cable connection terminal | Umożliwia połączenie kabla manipulatora ze sterownikiem. |
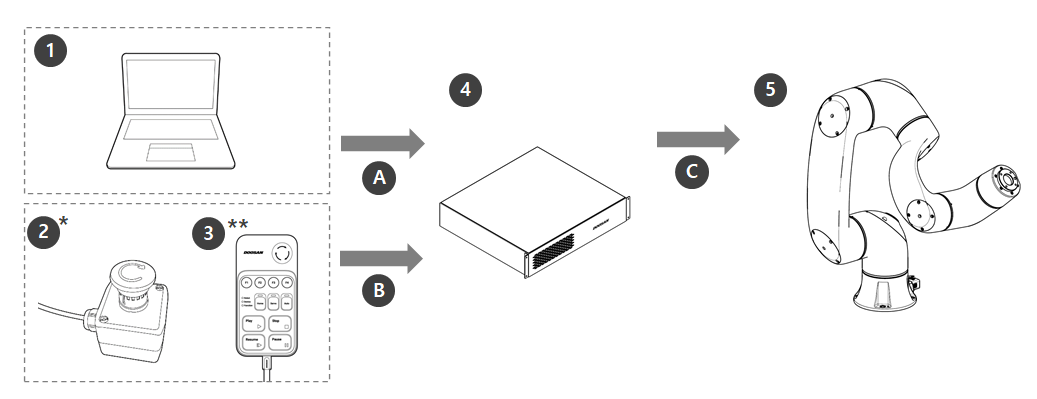
Konfiguracja systemu
| Lp | Element | Opis |
|---|---|---|
| 1 | Laptop | Po zainstalowaniu DART platform można skonfigurować środowisko pracy identyczne z programatorem ręcznym. Laptop nie wchodzi w skład zestawu, choć jest niezbędny do zainstalowania DART platform. |
| 2 | Przycisk zatrzymania awaryjnego* | Jeśli w systemie używany jest laptop, przycisk ten działa jako przycisk zatrzymania awaryjnego na programatorze ręcznym |
| 3 | Smart Pendant** | Urządzenie do łatwego sterowania robotem sposób za pomocą pilota obsługującego proste funkcje takie jak włączanie/wyłączanie serwa lub wykonywanie/zamykanie skonfigurowanych wcześniej programów. |
| 4 | Sterownik* | Do sterowania ruchami robota zgodnie z pozycją lub ruchem ustawionym na programatorze ręcznym. Zawiera różne gniazda we/wy umożliwiające podłączanie i korzystanie z różnego wyposażenia i urządzeń. |
| 5 | Manipulator* | Przemysłowy robot współpracujący przeznaczony do wykonywania prac związanych z transportem i montażem przy użyciu różnych narzędzi. |
| A | Command/ Monitoring | |
| B | Command | |
| C | Power Supply/ Network |
- Elementy są oznaczone jako części standardowe (*) i części opcjonalne (**, sprzedawane osobno)
Tabliczka znamionowa i etykieta