
Nazwy i funkcje
Manipulator
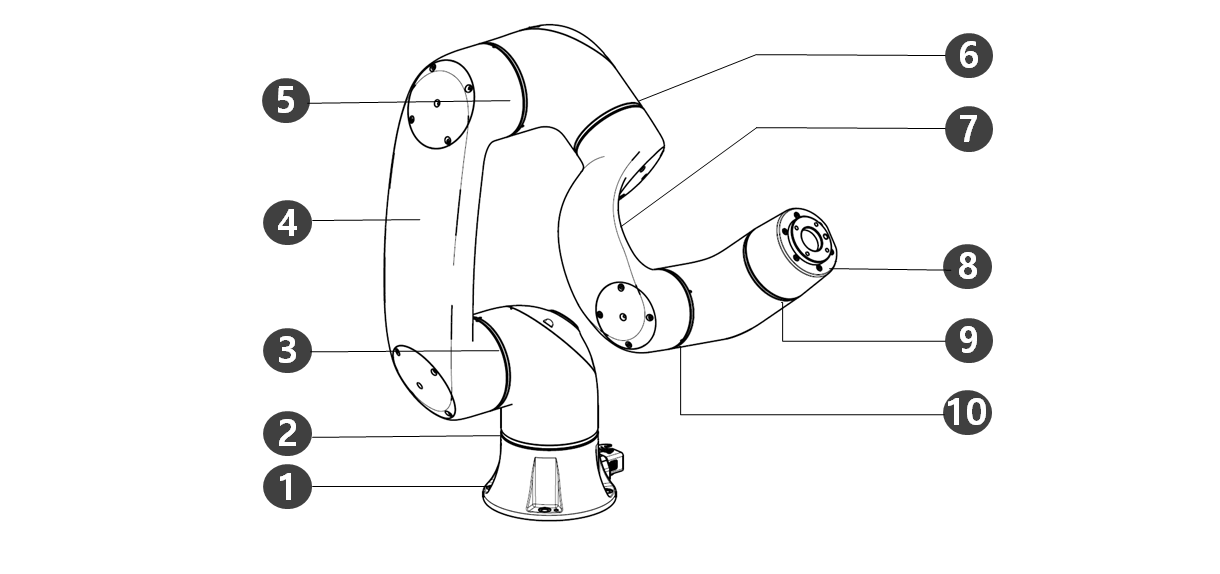
Nazwy części
Lp | Nazwa | Lp | Nazwa |
|---|---|---|---|
1 | Base | 6 | J4 |
2 | J1 | 7 | Link2 |
3 | J2 | 8 | Tool Flange |
4 | Link1 | 9 | J5 |
5 | J3 | 10 | J6 |
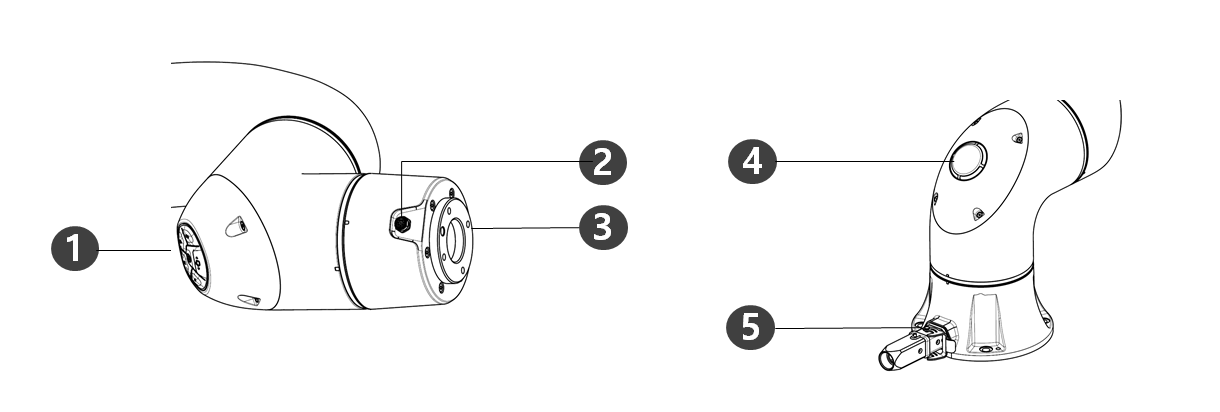
Najważniejsze funkcje
Lp | Element | Opis |
|---|---|---|
1 | Cockpit | [Opcja] Sterownik służy do bezpośredniego uczenia. |
| 2 | Flange I/O | Gniazdo we/wy do sterowania narzędziem. (Wejście cyfrowe 2-kan., wyjście 2-kan.) |
3 | Tool flange | Miejsce montażu narzędzi. |
4 | LED (1-axis) | Sygnalizuje stan robota za pomocą różnych kolorów. Aby uzyskać więcej informacji na temat stanu robota, patrz „ (2.12-pl_PL) Stan i kolor wskaźnika LED kołnierza w poszczególnych trybach” |
5 | Connector | Służy do zasilania robota i komunikacji z nim. |
Sterownik
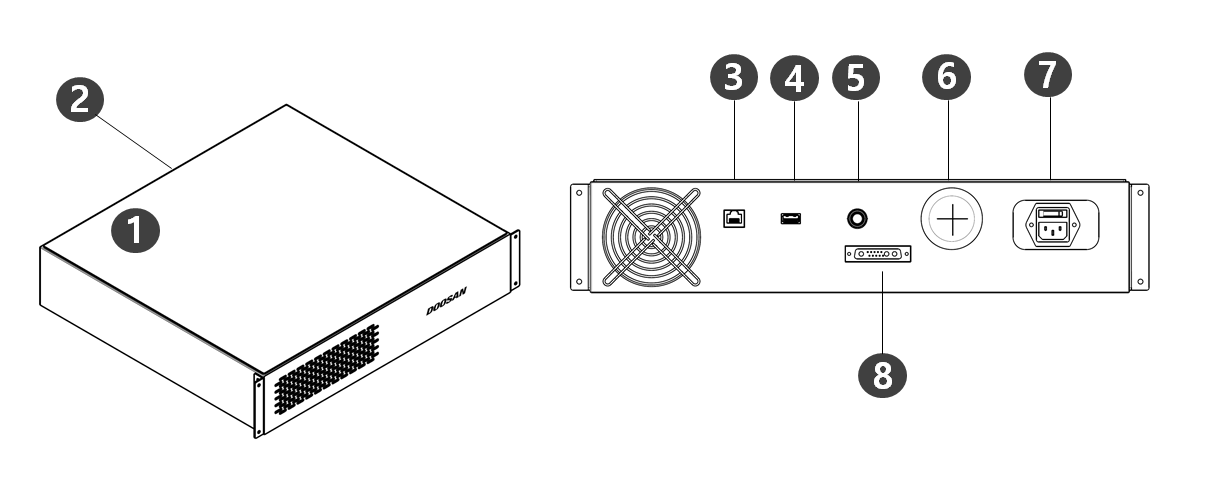
1 | I/O connection terminal (internal) | Nie jest możliwe połączenie ze sterownikami innych robotów ani z sąsiednim wyposażeniem. |
2 | Emergency stop button and Smart Pendant connection terminal | Umożliwia to podłączenie kabla przycisku zatrzymania awaryjnego lub lokalnego panelu sterowania do sterownika. |
3 | Network connection terminal | Laptopy, urządzenia TCP/IP, urządzenia Modbus i czujniki wizyjne można podłączyć do zacisku złącza sieciowego znajdującego się wewnątrz sterownika. |
4 | USB connection terminal | Dzienniki generowane podczas pracy robota można zapisywać na urządzeniu pamięci masowej USB, a zadania można eksportować lub importować. |
5 | Emergency stop button and Smart Pendant connection terminal | Umożliwia to podłączenie kabla przycisku zatrzymania awaryjnego lub lokalnego panelu sterowania do sterownika. |
6 | External cable terminal | Terminal umożliwiający podłączenie urządzeń zewnętrznych. |
7 | Power connection terminal | Do podłączenia zasilania sterownika. |
| 8 | Manipulator cable connection terminal | Umożliwia połączenie kabla manipulatora |
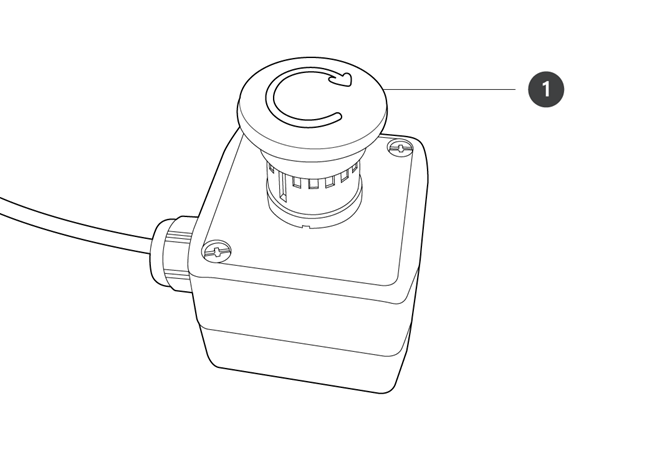
Przycisk zatrzymania awaryjnego
Lp | Element | Opis |
|---|---|---|
1 | Emergency stop button | Przycisk należy nacisnąć w sytuacji awaryjnej, aby zatrzymać działanie robota |
Smart Pendant
Urządzenie Smart Pendant nie jest standardowym elementem wyposażenia; należy je zakupić osobno
Aby uzyskać szczegółowe informacje na temat produktu, zapoznaj się z Załącznik. Smart Pendant (seria A).
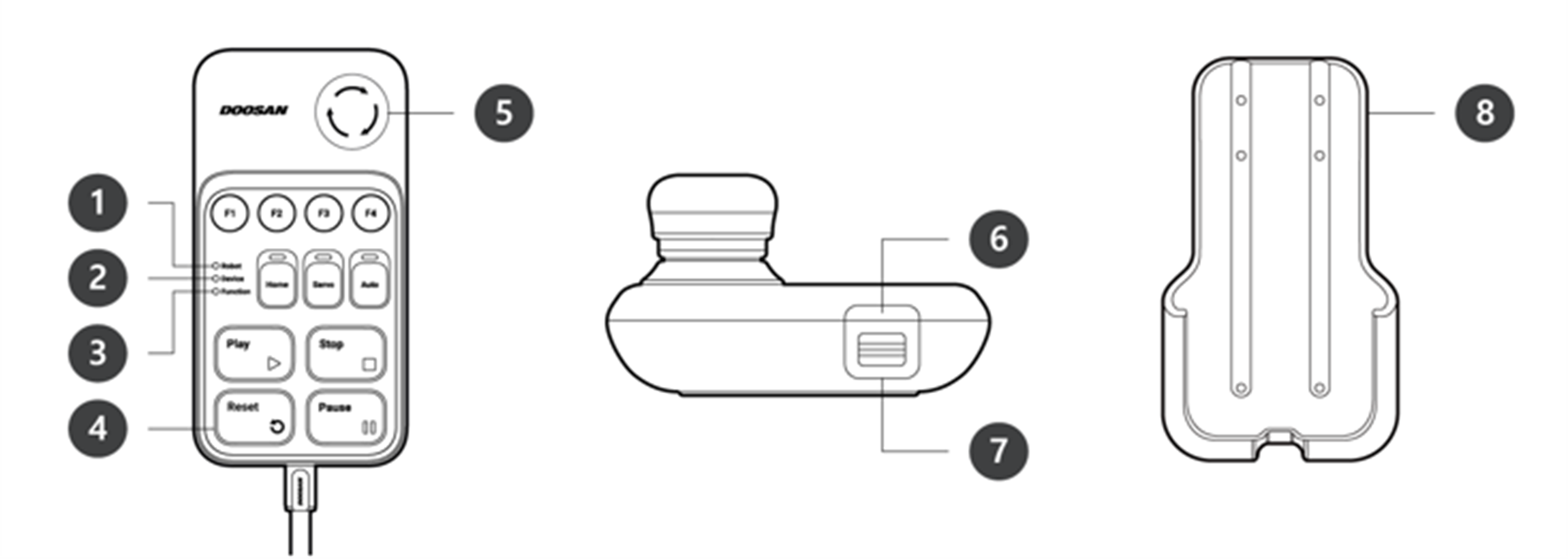
Lp | Element | Opis |
|---|---|---|
1 | Robot LED | Służy do sygnalizowania stanu robota przy użyciu tego samego koloru, co wskaźnika LED stanu robota. |
2 | Device LED | Informuje o tym, że system działa w trybie Smart Pendant. |
3 | Function LED | Po naciśnięciu czterech przycisków sygnału wejściowego (F1-F4) zapala się odpowiedni wskaźnik LED, wskazujący ustawiony stan. |
4 | Buttons | Programator posiada łącznie 11 przycisków, w tym cztery przyciski sygnału wejściowego (F1-F4) dla każdej funkcji, oraz przyciski Home, Servo, Auto, Play, Stop, Resume i Pause. |
5 | Emergency Stop Button | Przycisk należy nacisnąć w sytuacji awaryjnej, aby zatrzymać działanie robota. |
6 | Power Button | Służy do włączania/wyłączania doprowadzania zasilania głównego do urządzenia Smart Pendant. |
7 | Strap Anchor | Do mocowania paska do urządzenia. |
8 | Holder bracket | Po zamontowaniu uchwytu w ścianie można przechowywać w nim urządzenie Smart Pendant. |
Uwaga
- Aby korzystać z oprogramowania SW V2.8 lub nowszego, dołącz etykietę Reset do przycisku Wznów na inteligentnym breloku.
- Jeśli używana jest wersja niższa niż SW V2.8, etykieta resetowania nie musi być dołączana. W tej wersji przycisk wznawiania w Smart Pendant działa jako funkcja wznawiania, a nie funkcja resetowania.
- Etykieta może się odkleić podczas użytkowania, dlatego należy zachować ostrożność.