Umiejętności – spróbuj pobrać i umieścić próbki
OPCJONALNIE NORMALNY 20 MIN
Próbka ta jest tworzona w Kreatorze zadań. Aplikacja Task Writer nie obsługuje funkcji umiejętności.
PRZESTROGA
Przed próbą pobrania próbki należy przeczytać i postępować zgodnie (2.12-pl_PL) Środki ostrożności dotyczące użytkowaniaz instrukcjami . Aby uzyskać więcej informacji, patrz (2.12-pl_PL) CZĘŚĆ 1. Podręcznik bezpieczeństwa.
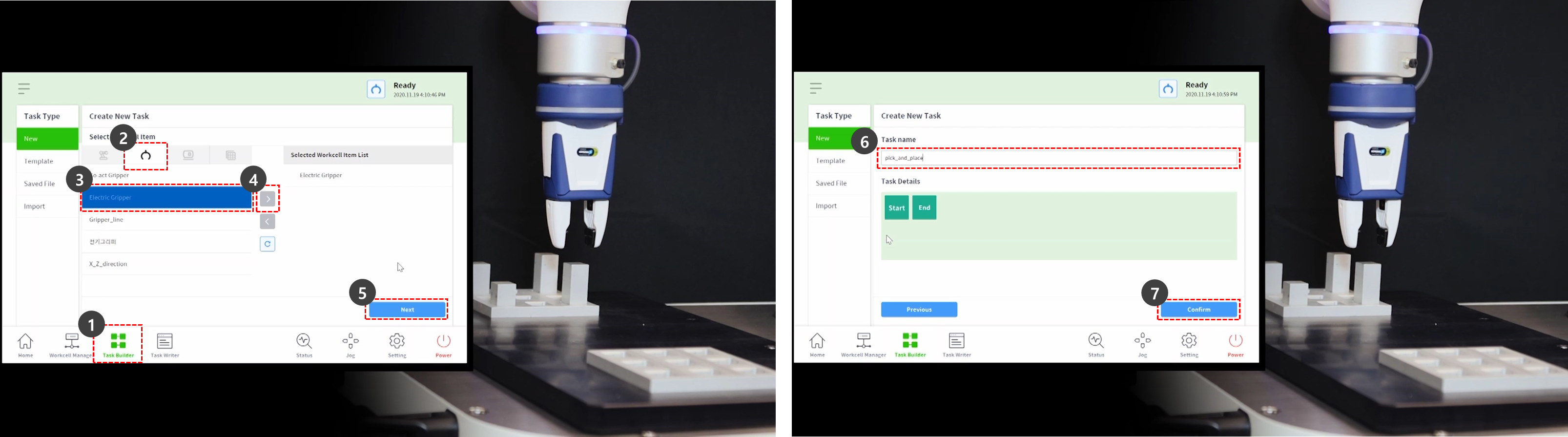
Wybrać generator zadań z dolnego menu.
Wybrać ikonę Wybierz element komórki roboczej > chwytak.
Wybrać chwytak zarejestrowany jako element komórki roboczej. Nie można spróbować tej próbki, jeśli nie zarejestrowano chwytaka jako elementu komórki roboczej.
Naciśnij przycisk >, aby zarejestrować element komórki roboczej jako wybrany element komórki roboczej.
Naciśnij przycisk Dalej.
Wprowadź nazwę zadania.
Nacisnąć Potwierdź.
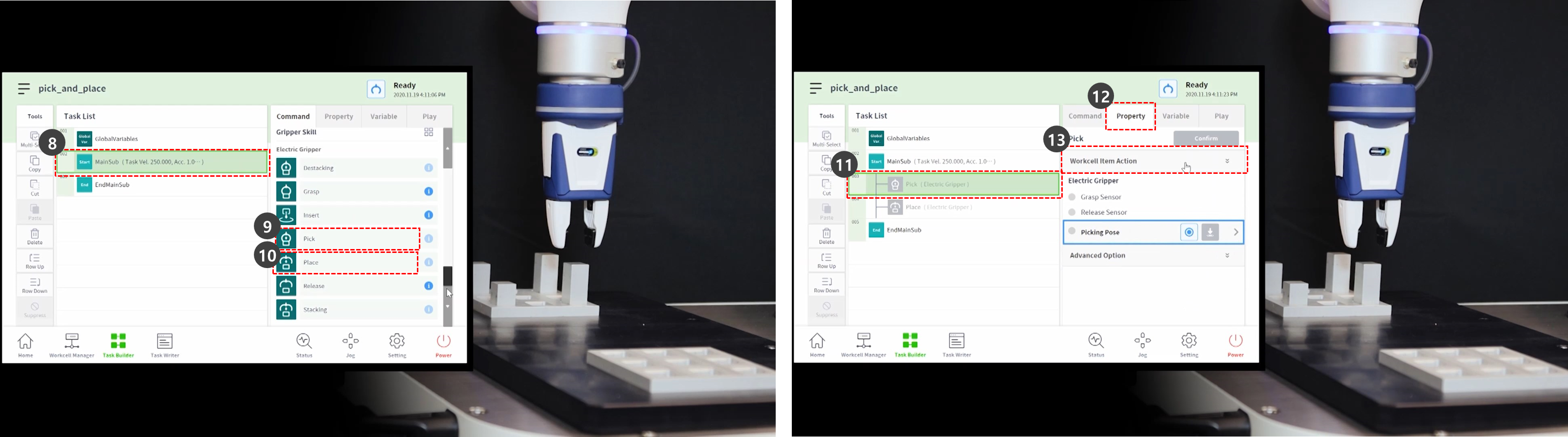
Wybierz polecenie MainSue z drugiego wiersza listy zadań. Nowe polecenie zostanie dodane do następnego wiersza wybranego wiersza.
Dodaj polecenie Wybierz umiejętność.
Dodaj polecenie zręcznościowe miejsce.
Wybierz polecenie Wybierz z trzeciego wiersza listy zadań.
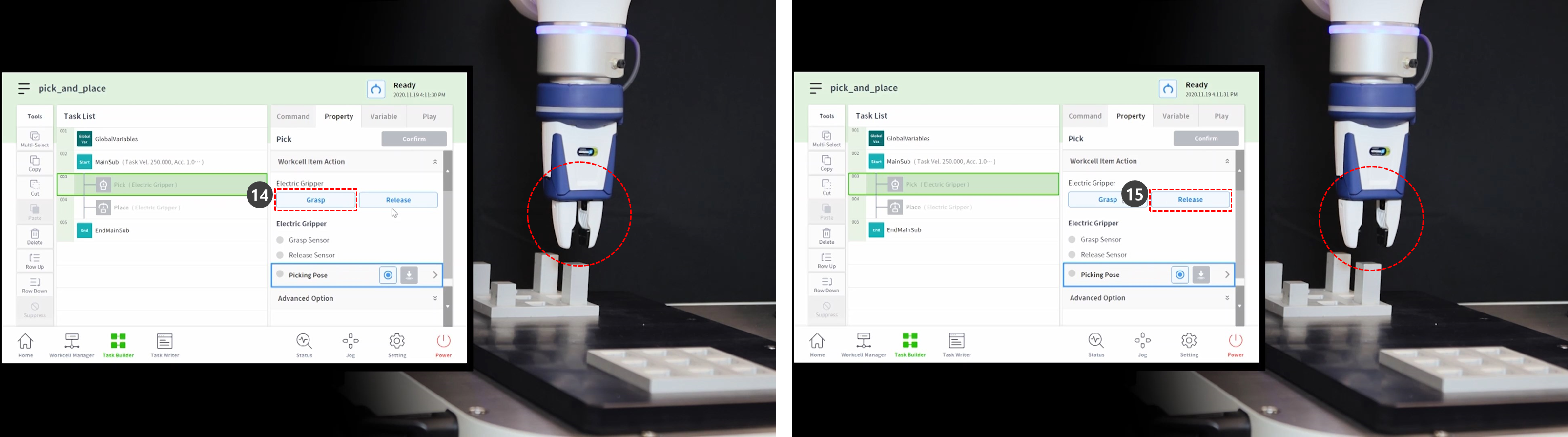
Wybrać kartę właściwość.
Naciśnij przycisk działanie elementu komórki roboczej, aby rozwinąć menu. Jeśli wybrano element komórki roboczej chwytaka, działanie chwytaka można przetestować podczas działania elementu komórki roboczej.
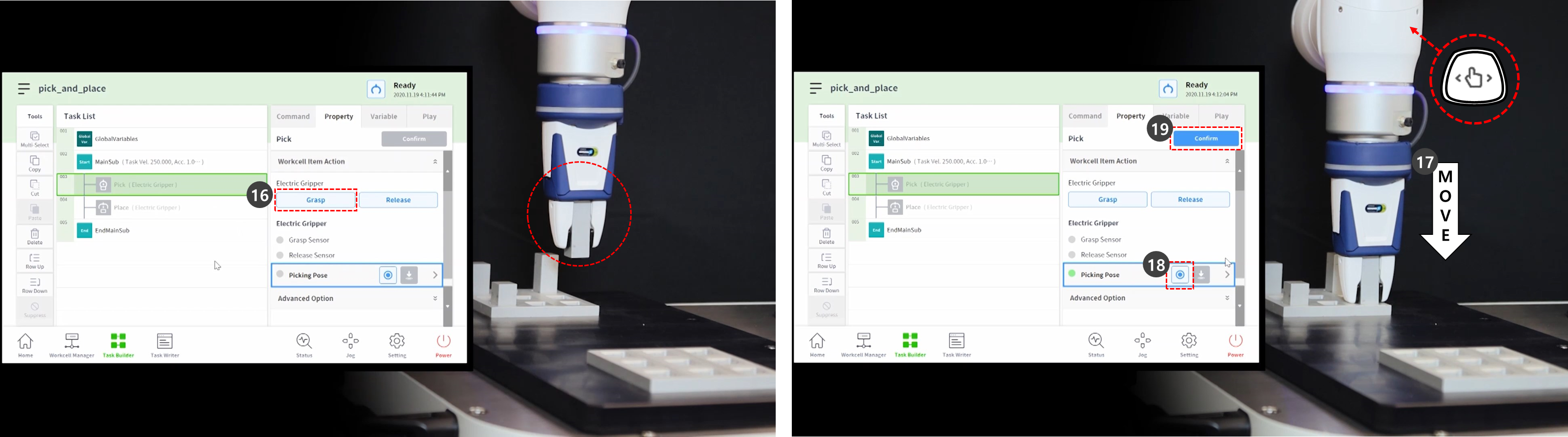
Aby przetestować chwytak, naciśnij przycisk chwytu i wykonaj ruch chwytu.
Aby przetestować chwytak, należy nacisnąć przycisk zwolnienia i wykonać ruch zwolnienia.
W przypadku lekkich przedmiotów obrabianych, umieścić przedmiot w chwytaku i nacisnąć przycisk chwytu, aby robot przytrzymywać przedmiot obrabiany. Wykonywanie nauczania podczas chwytaka przytrzymującego przedmiot obrabiany może pomóc w ustaleniu dokładnego położenia.
Jednakże posiadanie przez robota przedmiotu obrabianego podczas nauczania nie jest obowiązkowe, ale przykładem.
W przypadku ciężkich przedmiotów obrabianych mogą wystąpić niebezpieczne sytuacje, ponieważ chwytak może stracić obrabiany przedmiot.
W przypadku ciężkich przedmiotów obrabianych, masa narzędzia w ustawieniach narzędzi musi zawierać masę narzędzia i masę obrabianego przedmiotu.
Użyj bezpośredniego nauczania, aby przenieść robota do punktu, w którym ma zostać wykonany odbiór.
Nacisnąć i przytrzymać przycisk prowadzenia ręcznego w kokpicie, aby przesunąć robota.
Nacisnąć przycisk Get Pose (Pobierz położenie) na pozycji wybierania.
Nacisnąć przycisk zatwierdzania.
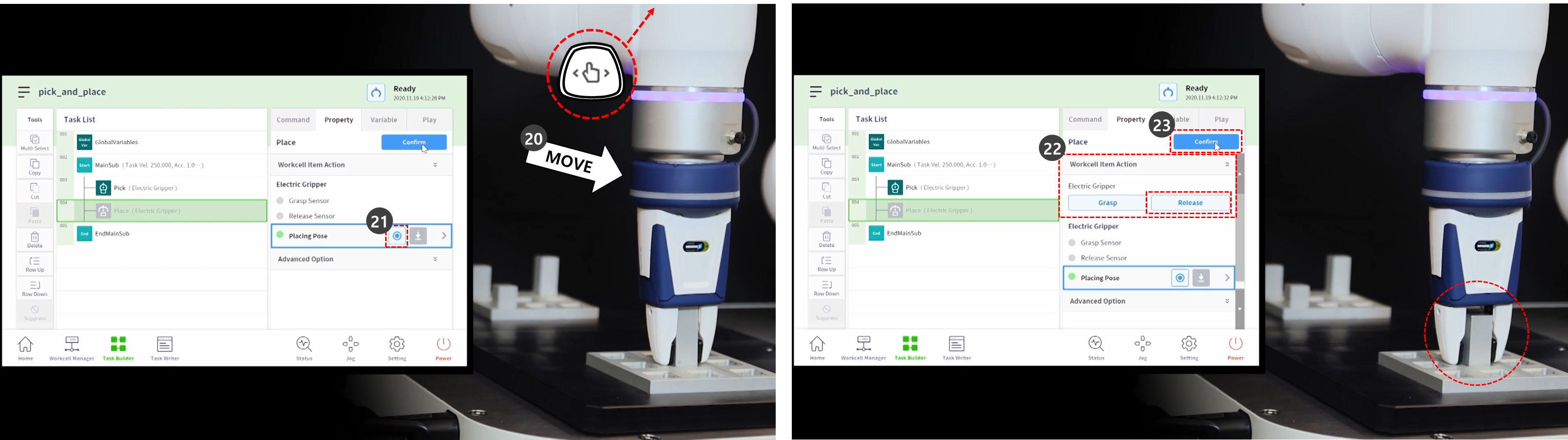
Użyj bezpośredniego nauczania, aby przenieść robota do punktu, w którym zostanie wykonane miejsce.
Naciśnij przycisk Get Pose (Pobierz położenie) na pozycji wprowadzania.
Aby zwolnić obrabiany przedmiot z chwytaka, należy nacisnąć przycisk Zwolnij.
Nacisnąć przycisk zatwierdzania.
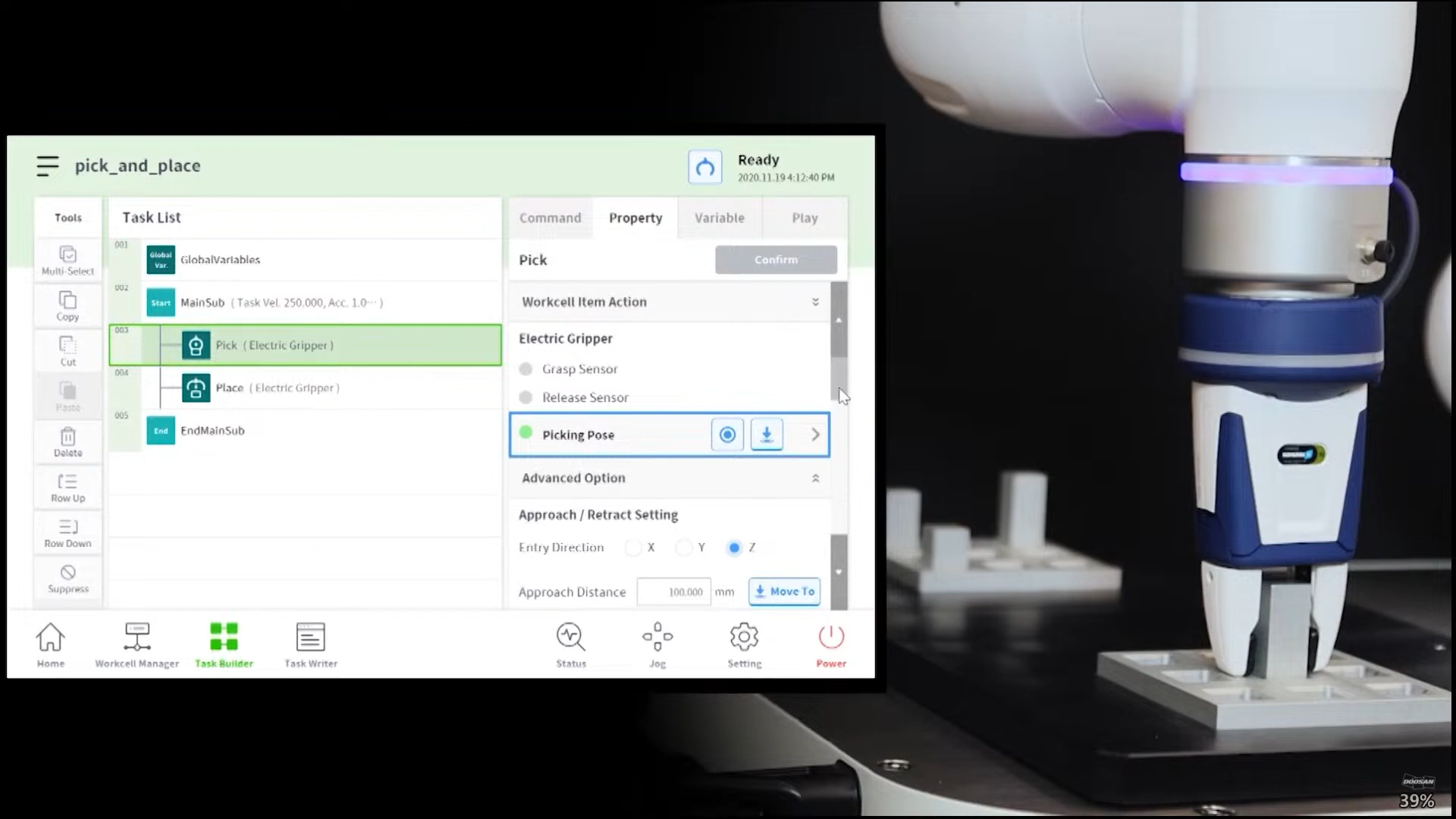
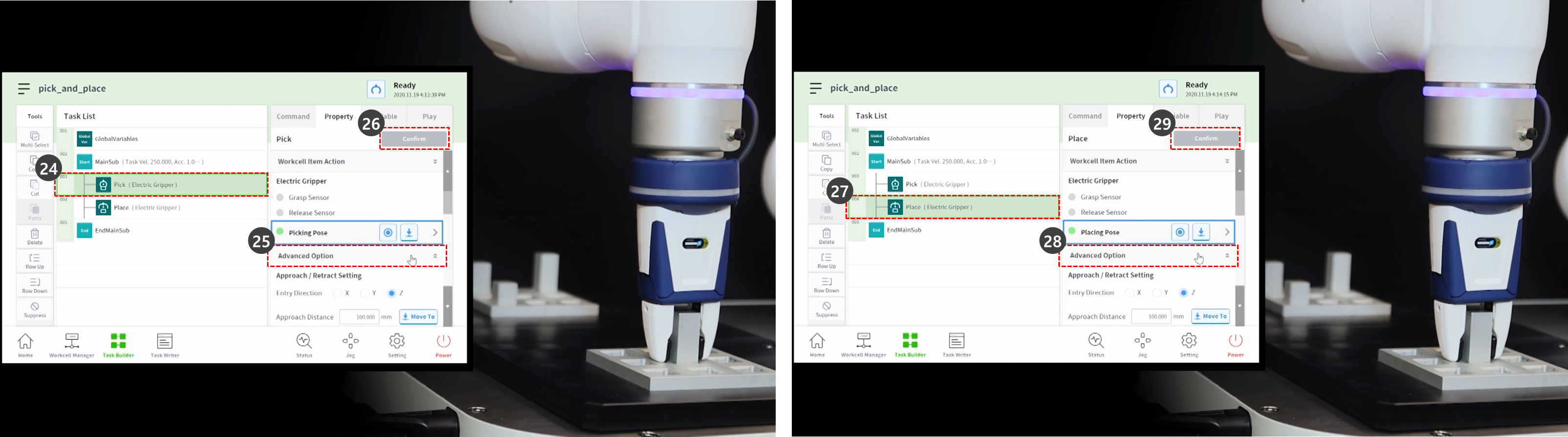
Aby ustawić szczegółowe ustawienia poleceń umiejętności Wybierz i umieść, wybierz polecenie Wybierz w trzecim wierszu listy zadań.
Naciśnij opcję Zaawansowane, aby rozwinąć menu i ustawić następujące opcje: Użyj wartości domyślnych dla elementów nieopisanych poniżej.
Kierunek wejścia: Oś Z.
It ustawia kierunek wprowadzania pozycji pobierania.
Odległość dosuania: 100 mm
It ustawia odległość tuż przed zbliżeniem robota do pozycji pobierania. It zapewnia wystarczającą odległość podejścia.
Odległość wsuwania: 100 mm
It ustawia odległość, po której odkurzacz automatyczny cofa się w ustawionym kierunku z pozycji pobierania. Zapewnia wystarczającą odległość wsuwania.
Prędkość dosuwu: 100 mm/s.
It ustawia prędkość dosuwu niższą niż wartość domyślna, gdy robot zbliża się do obiektu.
Kontrola zgodności: Włączony (zielony)
Styk czujnikowy: Włączony (zielony)
Funkcja It umożliwia kontrolę zgodności i wykrywanie kontaktów.
Siła kontaktowa: 10N
Tolerancja kontaktu: 10 mm
Siła: 15N
Odsunięcie zarysowania: 2 mm
Zwolnić chwytak przed pobraniem: Włączony (zielony)
It ustawia chwytak w stanie Zwolnij przed zbliżeniem się do miejsca pobierania.
Waga narzędzia: Brak
Jeśli obrabiany przedmiot nie jest lekki, należy zsumować masę obrabianego przedmiotu i masę narzędzia, dodać je jako element komórki roboczej masy narzędzia i wybrać.
Nacisnąć przycisk zatwierdzania.
Wybierz polecenie Umieść z czwartego wiersza listy zadań.
Naciśnij opcję Zaawansowane, aby rozwinąć menu i ustawić następujące opcje: Użyj wartości domyślnych dla elementów nieopisanych poniżej.
Kierunek wejścia: Oś Z.
Odległość dosuania: 100 mm
Odległość wsuwania: 100 mm
Prędkość dosuwu: 100 mm/s.
Kontrola zgodności: Włączony (zielony)
Styk czujnikowy: Włączony (zielony)
Funkcja It umożliwia kontrolę zgodności i wykrywanie kontaktów.
Siła kontaktowa: 10N
Tolerancja kontaktu: 10 mm
Siła: 15N
Waga narzędzia: Brak
Nacisnąć przycisk zatwierdzania.
Użyj bezpośredniego nauczania, aby przenieść robota do punktu, w którym rozpocznie się Pick&Place.
Przesunąć przedmiot obrabiany w miejsce pobierania.
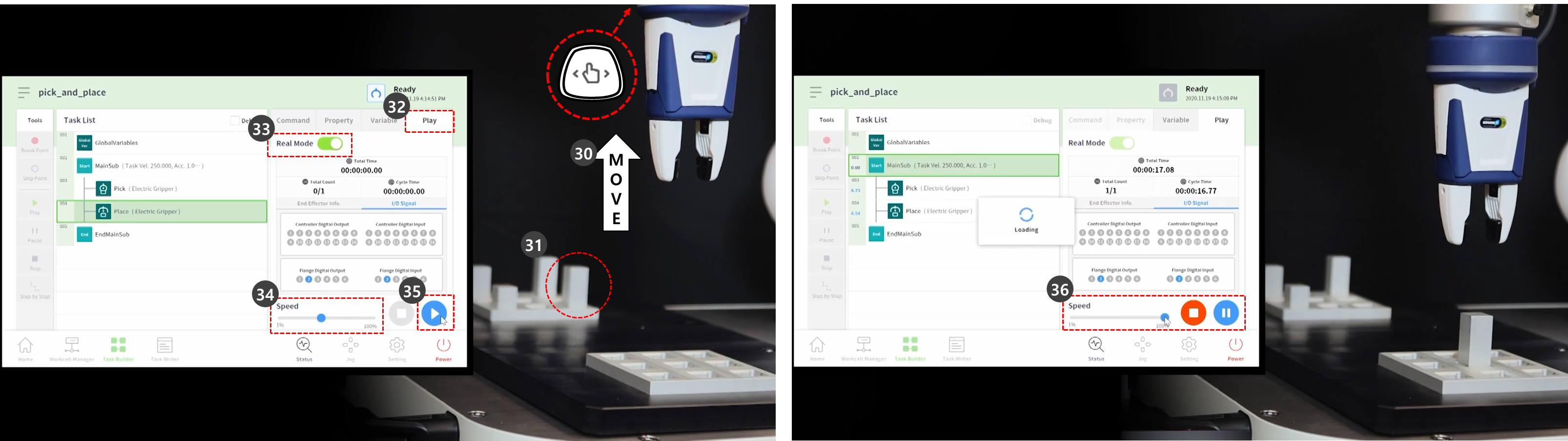
Wybierz kartę Odtwórz.
Włącz przycisk przełączania trybu Real Mode.
Ustaw suwak prędkości na 10–30%.
Ten suwak prędkości dostosowuje ustawioną prędkość wszystkich poleceń do wybranego %.
Wykonanie zadania po raz pierwszy po jego utworzeniu przy niskiej prędkości może zapobiec nieoczekiwanemu ryzyku.
Naciśnij przycisk odtwarzania.
Jeśli zadanie zostanie wykonane bez problemów, przywróć domyślną prędkość 100% i przetestuj ponownie.