
Montaż (CS-01P)
Ostrzeżenia dotyczące instalacji
Caution
- Przed przystąpieniem do montażu sterownika należy zapewnić odpowiednią ilość miejsca na sterownik. Brak zabezpieczenia odpowiedniej ilości miejsca grozi uszkodzeniem sterownika lub zwarciem w kablu programatora ręcznego bądź robota.
- Podczas podłączania zasilania do urządzenia należy sprawdzić źródło zasilania. Jeśli podłączone źródło zasilania ma inne parametry niż znamionowe (100–240 V AC 50/60 Hz), może dojść do nieprawidłowego działania urządzenia lub uszkodzenia sterownika.
Środowisko montażu
Podczas montażu sterownika należy uwzględnić kwestie wymienione poniżej.
- Przed przystąpieniem do montażu sterownika należy zapewnić odpowiednią ilość miejsca na sterownik.
- Sterownik musi być unieruchomiony.
Montaż sprzętu
Przed rozpoczęciem korzystania z robota należy zamontować robota, sterownik i programator ręczny, tj. główne komponenty systemu, oraz podłączyć do nich zasilanie. Montaż poszczególnych komponentów przebiega następująco:
Podłączanie manipulatora i sterownika
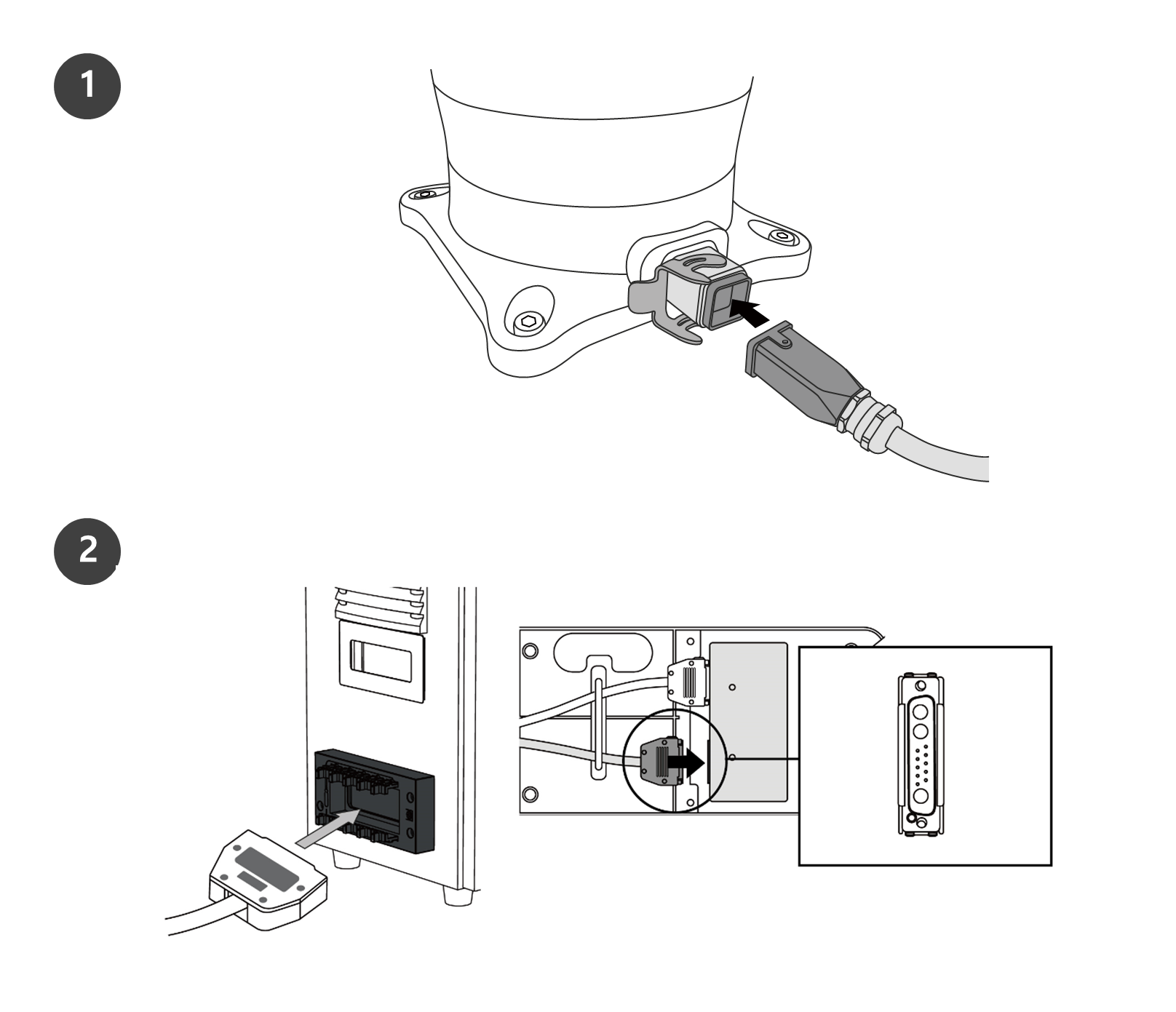
| Opis | |
|---|---|
| 1 | Podłączyć kabel manipulatora do sterownika, założyć pierścień zabezpieczający
|
| 2 | Podłączyć drugi koniec kabla manipulatora do złącza sterownika
|
Przestroga
- Nie odłączać przewodu robota, gdy robot jest włączony. Może to doprowadzić do uszkodzenia robota.
- Nie zmieniać ani nie przedłużać przewodu manipulatora.
- W przypadku montażu sterownika należy pozostawić co najmniej 50 mm przestrzeni z każdej strony sterownika, aby zapewnić wentylację.
- Przed włączeniem sterownika upewnić się, że połączenia wykonano prawidłowo.
Uwaga
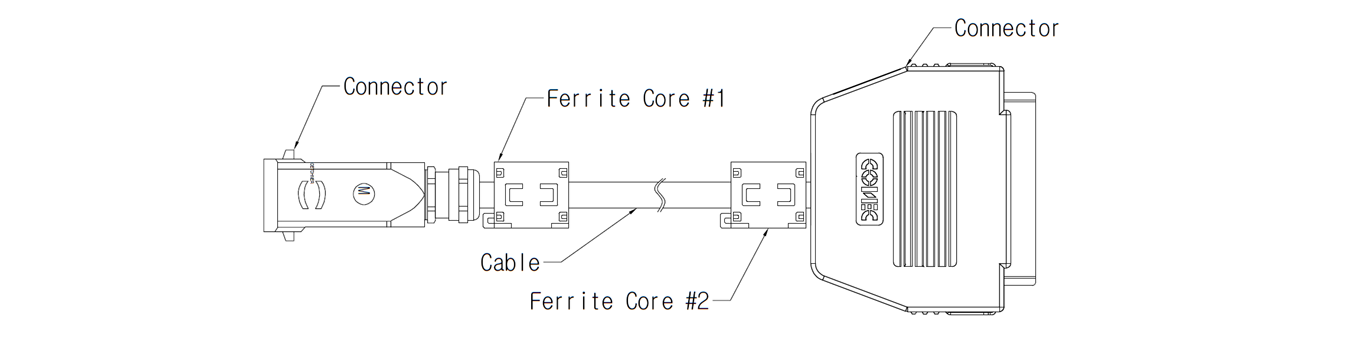
- Podczas konfigurowania systemu zaleca się zamontowanie filtra ferrytowego w celu zapobiegania wpływowi zakłóceń i nieprawidłowemu działaniu systemu.
- Jeśli na sterownik oddziałują zakłócenia wytwarzane przez fale elektromagnetyczne, to niezbędne jest zamontowanie rdzenia ferrytowego w celu uzyskania normalnego działania. Miejsce instalacji jest następujące:
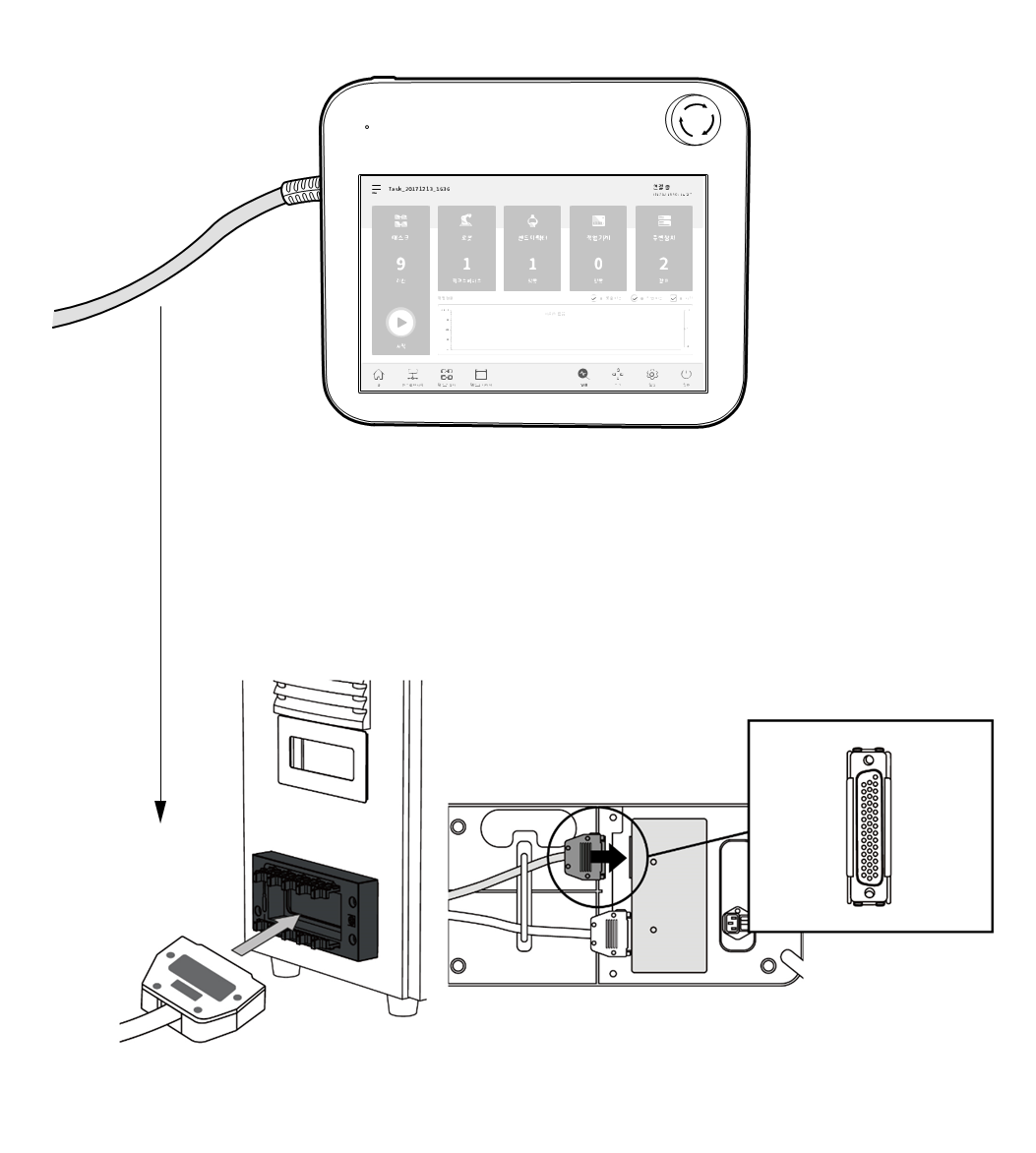
Podłączanie sterownika i programatora ręcznego
Aby mieć pewność, że kabel nie poluzuje się, należy wcisnąć kabel programatora ręcznego w odpowiednie złącze w sterowniku do chwili, aż słyszalne będzie kliknięcie.
Przestroga
- Przed podłączeniem kabla upewnić się, że styki kabla nie są uszkodzone lub zgięte.
- Jeśli programator ręczny podczas użytkowania jest zawieszony na AGV lub sterowniku, należy uważać, aby nie potknąć się o kable użyte do wykonania połączenia.
- Nie dopuścić do zetknięcia się sterownika, programatora ręcznego i kabla z wodą.
- Nie instalować sterownika ani programatora ręcznego w otoczeniu zapylonym lub wilgotnym.
- Sterownik i programator ręczny nie mogą być narażone na obecność pyłu. Należy zachować szczególną ostrożność w miejscach, w których występuje pył przewodzący.
Uwaga
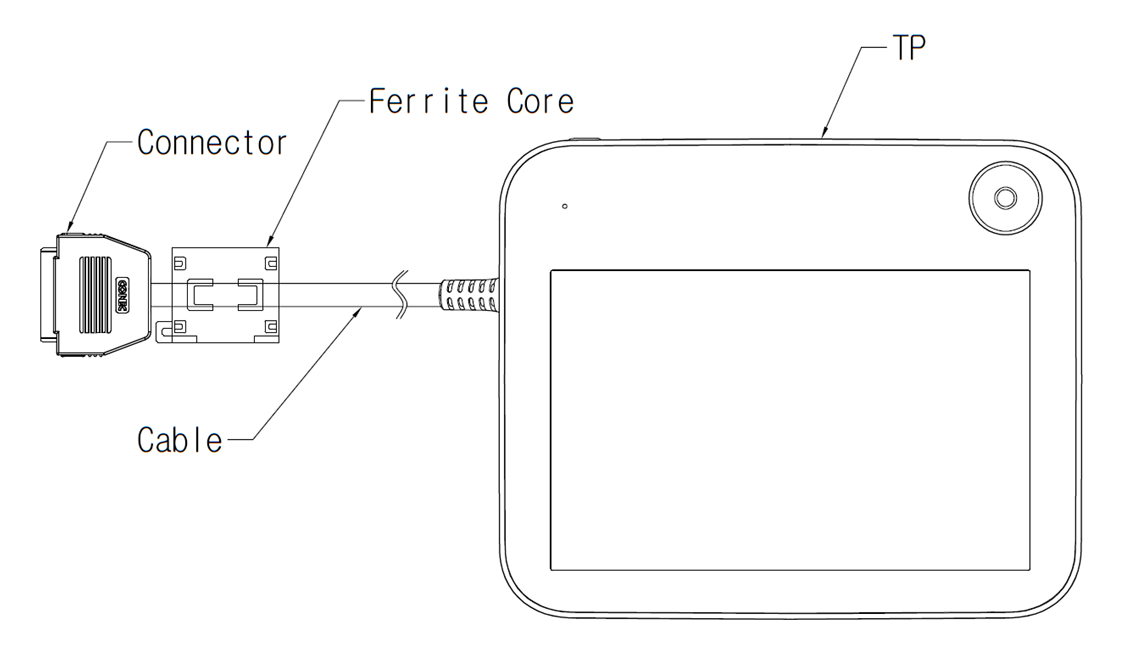
- Podczas konfigurowania systemu zaleca się zamontowanie filtra ferrytowego w celu zapobiegania wpływowi zakłóceń i nieprawidłowemu działaniu systemu.
- Jeśli na programator ręczny oddziałują zakłócenia wytwarzane przez fale elektromagnetyczne, to niezbędne jest zamontowanie rdzenia ferrytowego w celu uzyskania normalnego działania. Miejsce instalacji jest następujące:
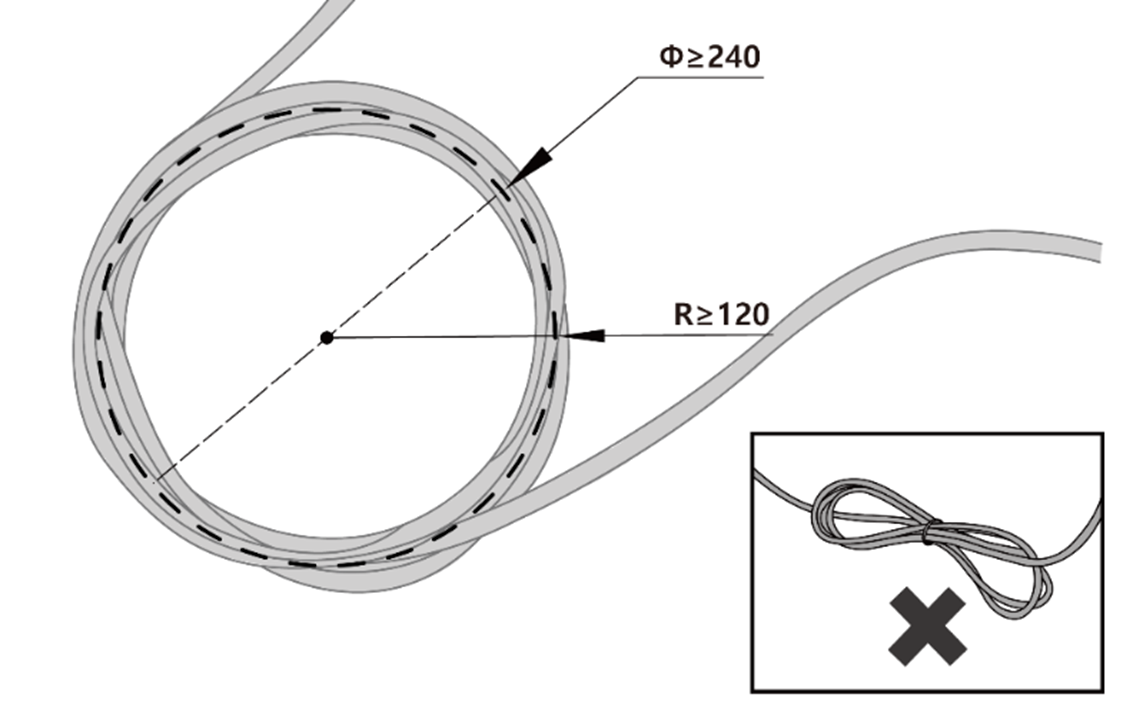
Prowadzenie kabla manipulatora i programatora ręcznego
Promień krzywizny kabla manipulatora i programatora ręcznego powinien być większy niż minimalny promień krzywizny (120 mm).
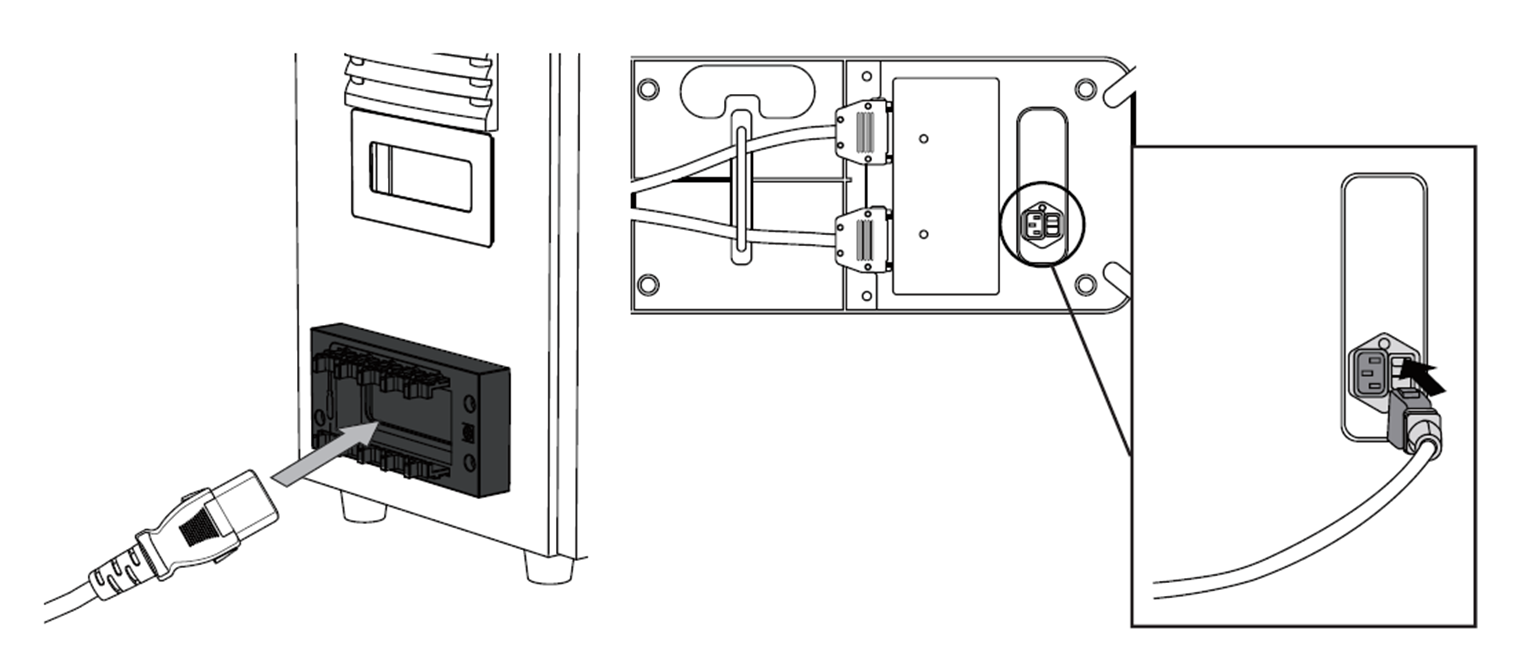
Doprowadzanie zasilania do sterownika
Aby mieć pewność, że kabel nie poluzuje się, należy wcisnąć kabel programatora zasilania w odpowiednie złącze na sterowniku do chwili, aż słyszalne będzie kliknięcie.
Ostrzeżenie
- Po podłączeniu kabla zasilającego należy się upewnić, że robot jest prawidłowo podłączony do masy (połączenie z masą). Zapewnić połączenie ze wspólną masą dla wszystkich urządzeń w systemie za pomocą nieużywanej śruby oznaczonej symbolem masy wewnątrz sterownika. Przewód masy musi spełniać wartość znamionową maksymalnego natężenia prądu systemu.
- Zabezpieczyć wejście zasilania sterownika za pomocą odpowiedniego urządzenia, np. wyłącznika automatycznego.
- Nie zmieniać ani nie przedłużać kabla robota. Może to spowodować pożar lub awarię sterownika.
- Przed zasileniem sterownika należy się upewnić, że wszystkie kable są podłączone prawidłowo. Należy stosować zawsze oryginalny kabel dołączony do produktu.
- Przy podłączaniu napięcia wejściowego należy pamiętać o zachowaniu prawidłowej biegunowości.
Uwaga
- Podczas konfigurowania systemu zalecamy zainstalowanie wyłącznika zasilania umożliwiającego równoczesne odłączenie zasilania od wszystkich urządzeń.
- Jeśli napięcie wejściowe wynosi poniżej 195 V, ruch robota może być ograniczony w zależności od obciążenia i ruchu.
- Źródło zasilania musi spełniać minimalne wymagania dotyczące masy, uziemienia i wyłączników automatycznych. Specyfikacja elektryczna: (Jeśli wybrano opcjonalny sterownik, należy zapoznać się z instrukcjami zawartymi w załączniku)
Parametr
Specyfikacja
Input Voltage
100 – 240 VAC
Input Power Fuse (@100-240V)
15 A
Input Frequency
47 – 63 Hz