Konfiguracja systemu
| Lp | Element | Opis |
|---|---|---|
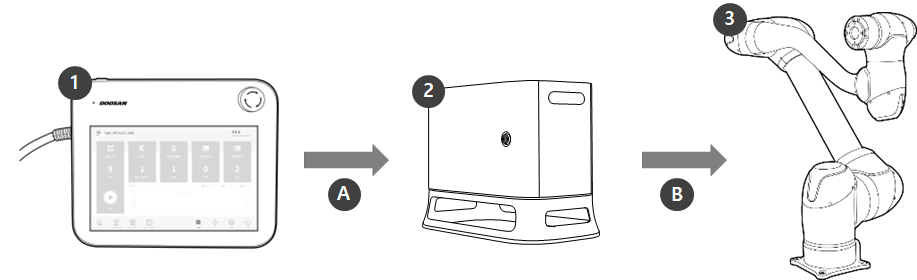
| 1 | Programator ręczny | Urządzenie do zarządzania całym systemem, za pomocą którego można uczyć robota określonych pozycji oraz konfigurować ustawienia manipulatora i sterownika. |
| 2 | Sterownik | Do sterowania ruchami robota zgodnie z pozycją lub ruchem ustawionym w programatorze ręcznym. Zawiera różne gniazda we/wy umożliwiające podłączanie i korzystanie z różnego wyposażenia i urządzeń. |
| 3 | Manipulator | Przemysłowy robot współpracujący przeznaczony do wykonywania prac związanych z transportem i montażem przy użyciu różnych narzędzi. |
| A | Command/ Monitoring | |
| B | Power Supply/ Network |
Uwaga
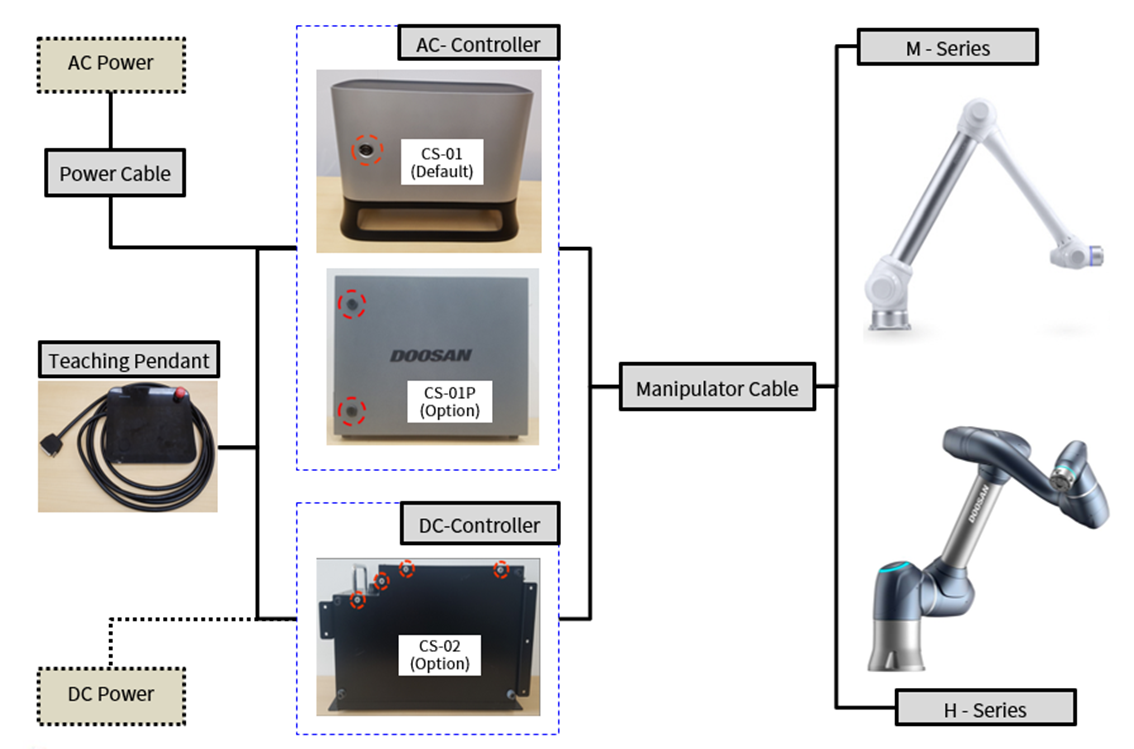
- Patrz konfiguracje systemu robota serii M i serii H podane poniżej.