Robot znajduje się w pozycji opakowania, co umożliwia łatwy transport lub pakowanie. Aby korzystać z robota, konieczne jest odłączenie pozycji opakowania. Ponieważ robot utrzymuje pozycję, która przekracza limit kąta połączenia podczas pakowania, nie można ustawić stanu Servo ON z powodu naruszenia limitu bezpieczeństwa. W tym stanie dioda LED robota świeci na czerwono.
Uwaga
W przypadku konieczności pakowania robota z powodu zmiany lokalizacji należy ustawić pozycję opakowania za pomocą opcji Przenieś z opakowaniem w trybie pakowania.
Proces uwalniania pozycji opakowania jest następujący:
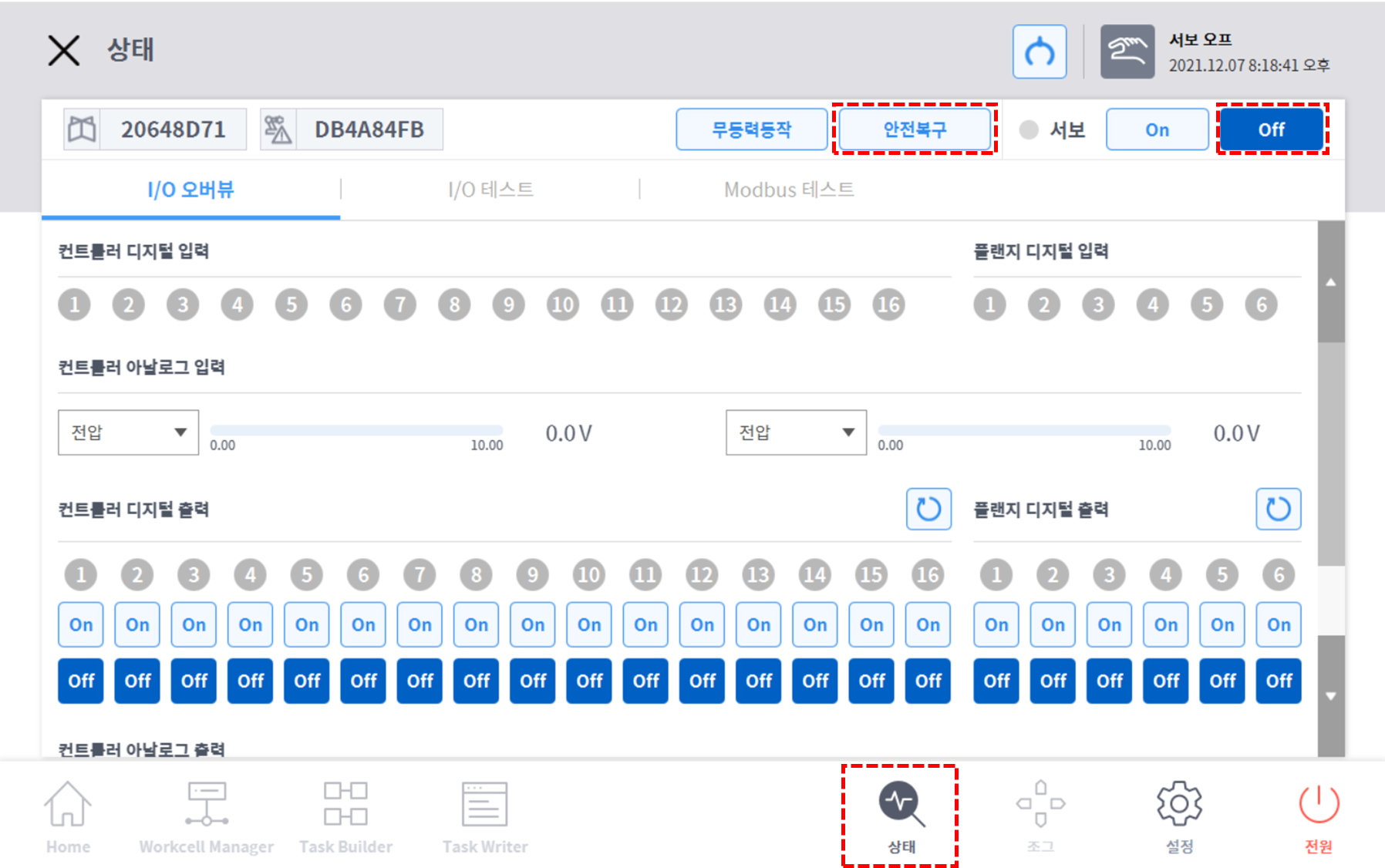
Dotknij opcji stan na ekranie początkowym manipulatora danych.
Dotknij przycisku przywracania bezpieczeństwa . Przycisk przywracania bezpieczeństwa jest włączony, gdy jest w stanie Servo wył .
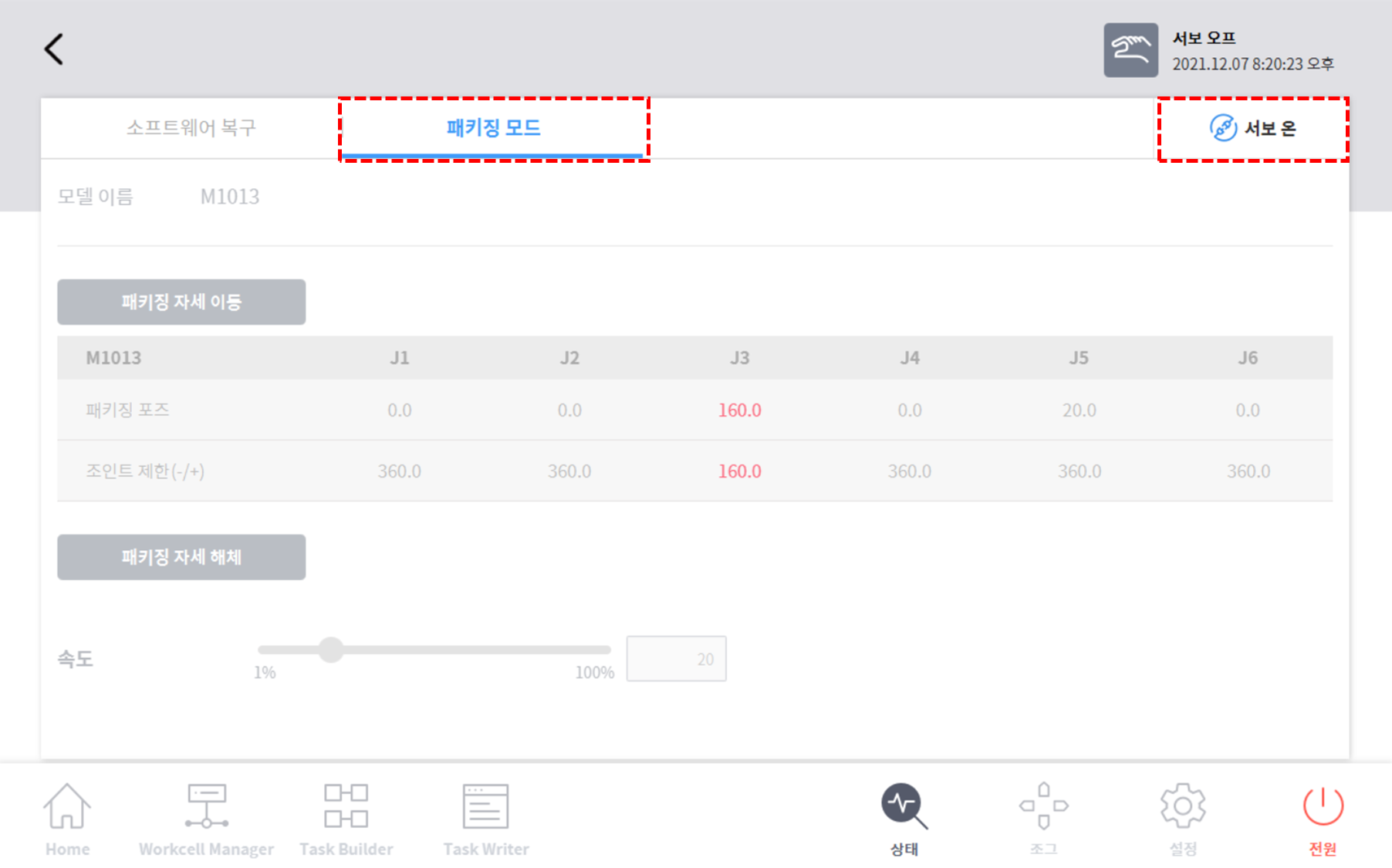
Wybierz kartę Tryb pakowania .
Dotknij przycisku Servo on .
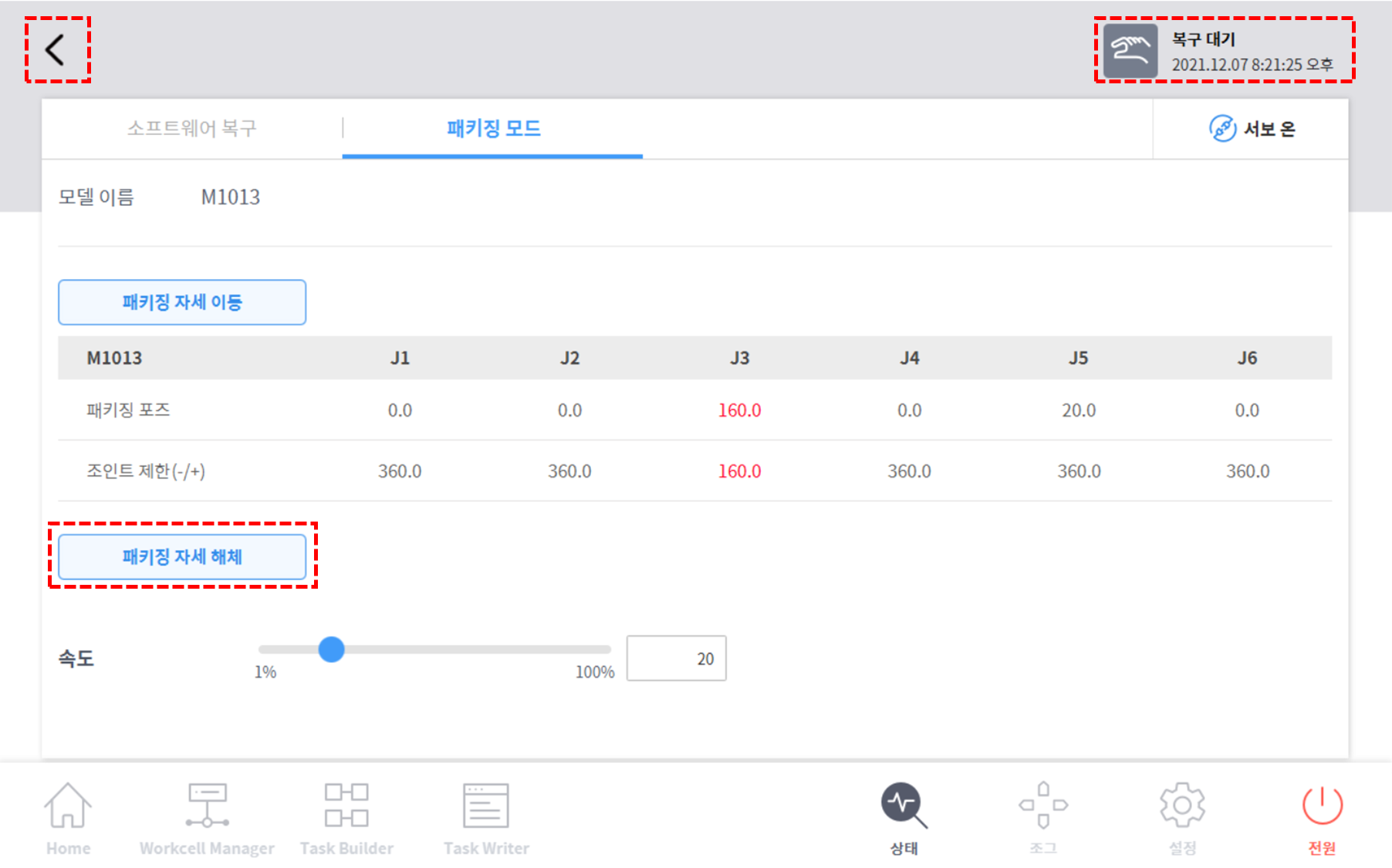
Wyświetlacz stanu robota w prawym dolnym rogu ekranu manipulatora wyuczonego zmieni się z Safety Off (Bezpieczeństwo wył .) na Recovery Standby (Gotowość przywracania). Dotknij przycisku przełączania trybu pakowania na karcie Tryb pakowania .
Naciśnij i przytrzymaj przycisk Rozłącz położenie pakowania . Tryb pakowania robota jest wyłączony, a robot ustawia się w pozycji wyjściowej. Gdy odkurzacz automatyczny znajduje się w pozycji wyjściowej, nie porusza się dalej.
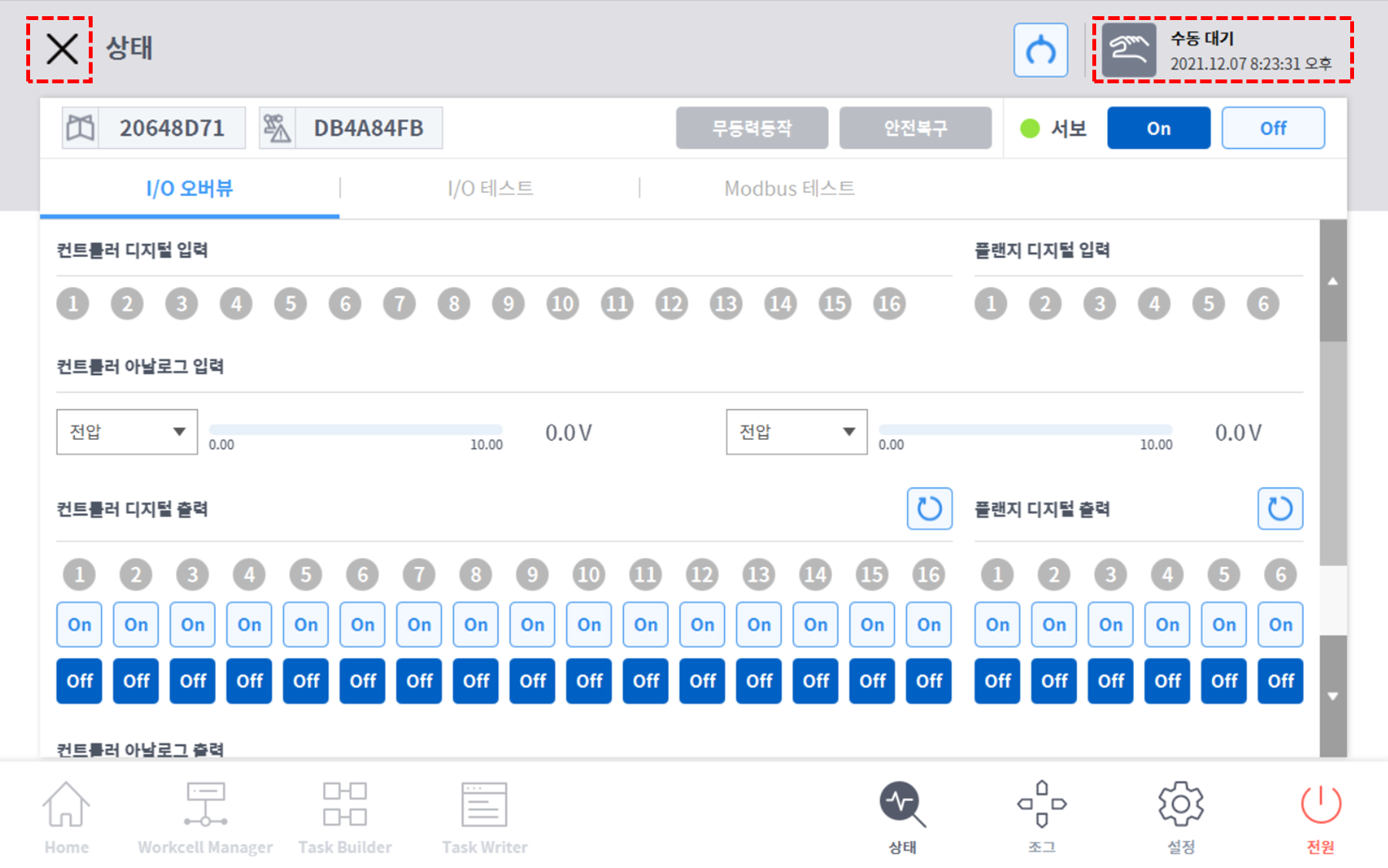
Po ustawieniu robota w pozycji wyjściowej dotknij przycisku w lewym górnym rogu ekranu.
Wyświetlacz stanu robota w prawym dolnym rogu manipulatora wyuczonego zmieni się z trybu gotowości przywracania na tryb gotowości ręcznej. Robot znajduje się teraz w stanie, w którym może go obsługiwać użytkownik. Nacisnąć przycisk Zamknij na ekranie Status , aby zamknąć okno stanu.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.