
Przegląd podstawowych pojęć za poleceniem Przenieś edytora zadań
Roboty Doosan Robotics oferują 9 ruchów. Ruch robota jest kontrolowany za pomocą standardowych ruchów, MoveJ i MoveL oraz 7 ruchów pochodzących z tych dwóch ruchów.
Rodzaje ruchu robota
Ruch | Operacja | |
|---|---|---|
1 | MoveJ | Każde połączenie robota przesuwa się z bieżącego kąta do kąta docelowego i zatrzymuje się jednocześnie
 |
2 | MoveL | Robot przesuwa się do punktu docelowego, utrzymując robota TCP prosto
 |
3 | MoveSJ | Robot porusza się we wszystkich kątach ustawionych przez robota
|
4 | MoveSX | Robot TCP porusza się we wszystkich punktach
|
5 | MoveJX | Pozycja robota jest oznaczona, gdy robot TCP przesuwa się do punktu docelowego
|
6 | MoveC | Robot TCP przesuwa się do punktu docelowego, zachowując łuk 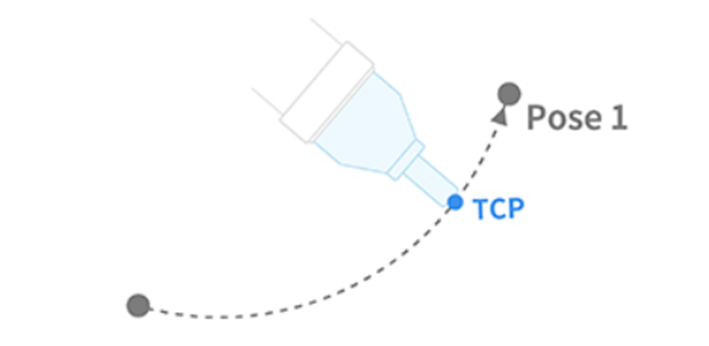 |
7 | MoveB | Robot przesuwa się do końcowego punktu docelowego przez odcinek składający się z ciągłych linii prostych i łuków 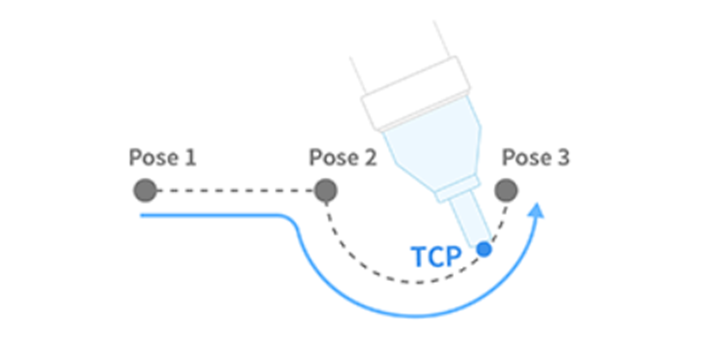 |
8 | MoveSpiral | Robot przesuwa się ze środka spirali do maksymalnego promienia 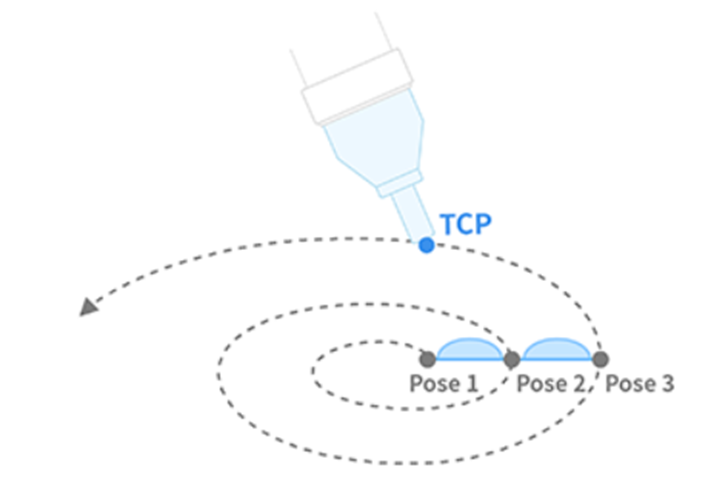 |
9 | Moveokresowe | Robot porusza się po ścieżce ze stałą amplitudą i cyklem 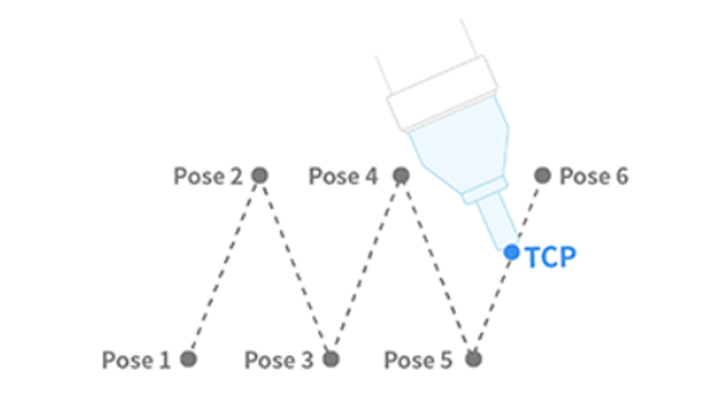 |
MoveJ&MoveL
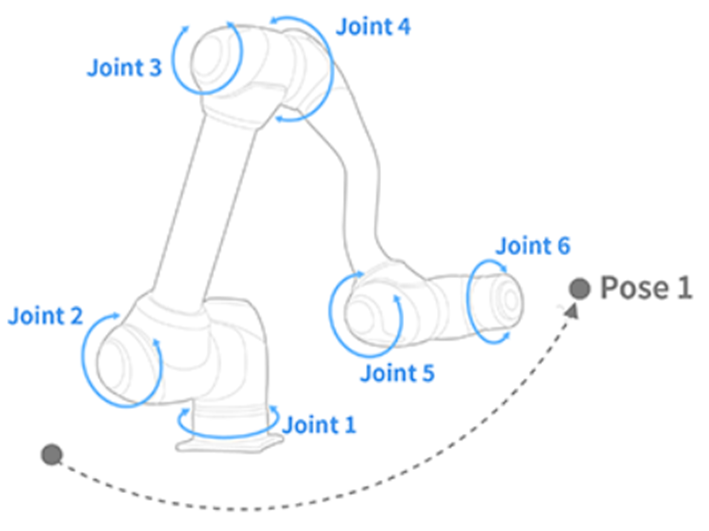
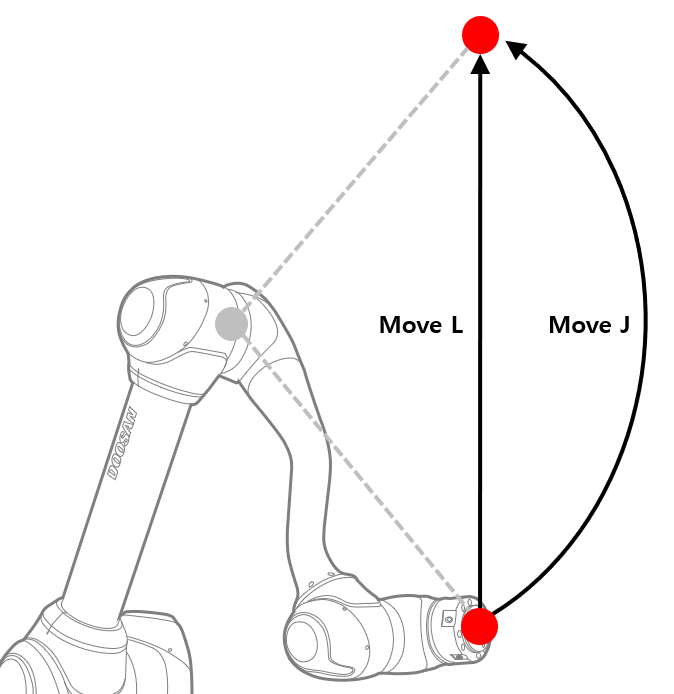
Przed użyciem ruchu robota, ważne jest, aby zrozumieć standardowe ruchy MoveJ i MoveL.
J w MoveJ odnosi się do stawów. W tym ruchu każde połączenie przesuwa się do kąta docelowego i zatrzymuje się jednocześnie.
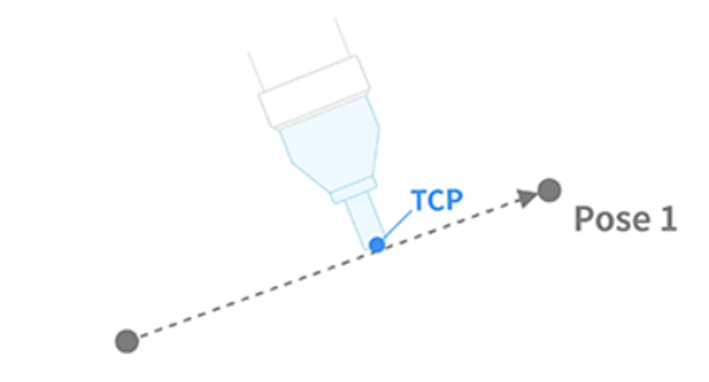
L w MoveL odnosi się do liniowego. W tym ruchu TCP na końcu robota przesuwa się do pozycji docelowej (pozycji i kąta) z ruchem liniowym.
Typ | MoveJ | MoveL | |
|---|---|---|---|
1 | Metoda przenoszenia |
|
|
2 | Korzyści |
|
|
3 | Wadą |
|
|
4 | Wykorzystanie |
|
|