
Ustawianie robota
Ustawianie informacji o robocie
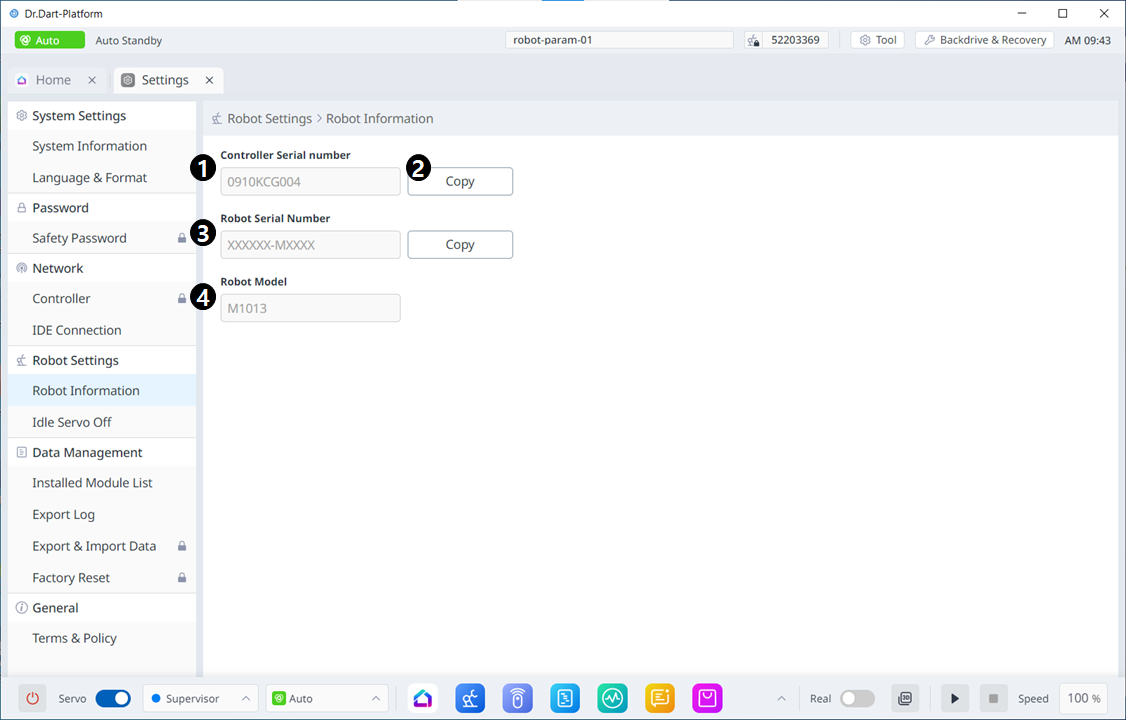
Menu
Elementy | Opis | |
|---|---|---|
| 1 | Numer seryjny sterownika | W tym miejscu wyświetlany jest numer seryjny sterownika. |
| 2 | Kopiuj numer seryjny kontrolera | Ten przycisk umożliwia skopiowanie numeru seryjnego. |
| 3 | Numer seryjny robota | W tym miejscu widoczny jest numer seryjny robota. |
| 4 | Model robota | W tym miejscu widoczna jest nazwa modelu robota. |
Siłownik bezczynności wyłączony
Jeśli robot jest bezczynny przez pewien czas, automatycznie przełącza się w stan wyłączenia bezpieczeństwa. Wartością domyślną jest 5 minut, ale czas można zmienić na preferowany przez użytkownika czas.
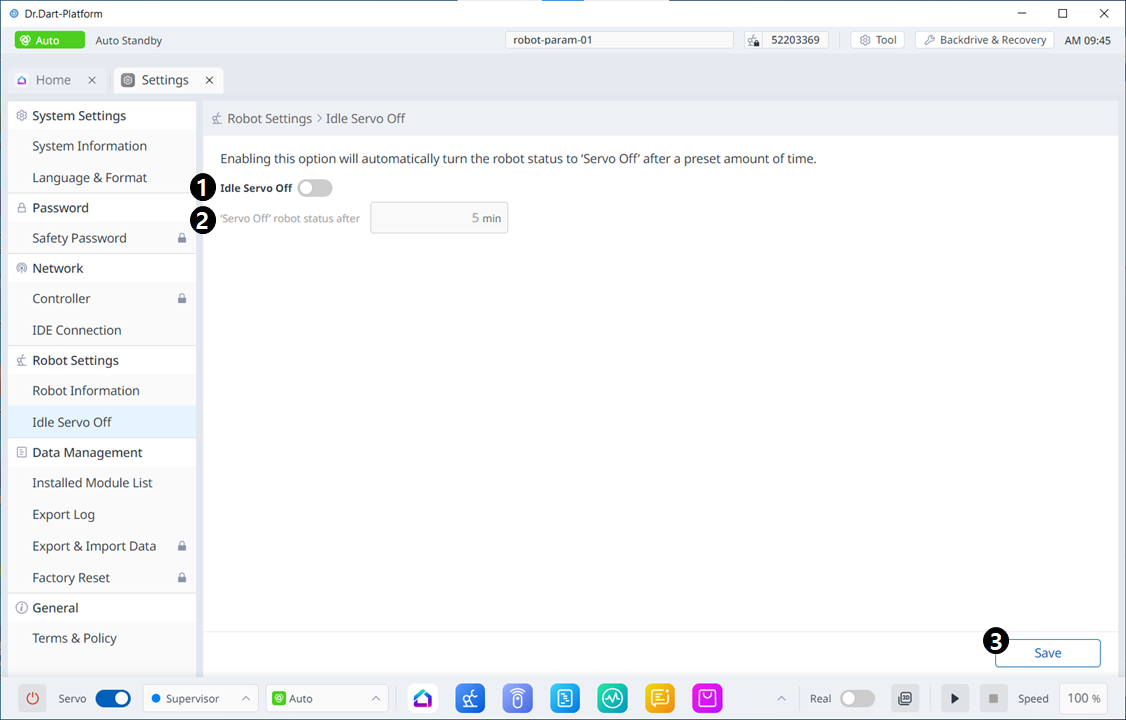
Menu
Elementy | Opis | |
|---|---|---|
| 1 | Włącz funkcję Servo Off | Ten przycisk umożliwia wyłączenie serwomechanizmu biegu jałowego. |
| 2 | Ustawienie wyłączenia serwomechanizmu | To pole służy do wyłączania serwomechanizmu bezczynności w minutach. |
| 3 | Zapisz | Ten przycisk umożliwia zapisanie zmienionych ustawień. |
Kalibracja tarcia
To menu jest dostępne tylko dla robotów serii E i A.
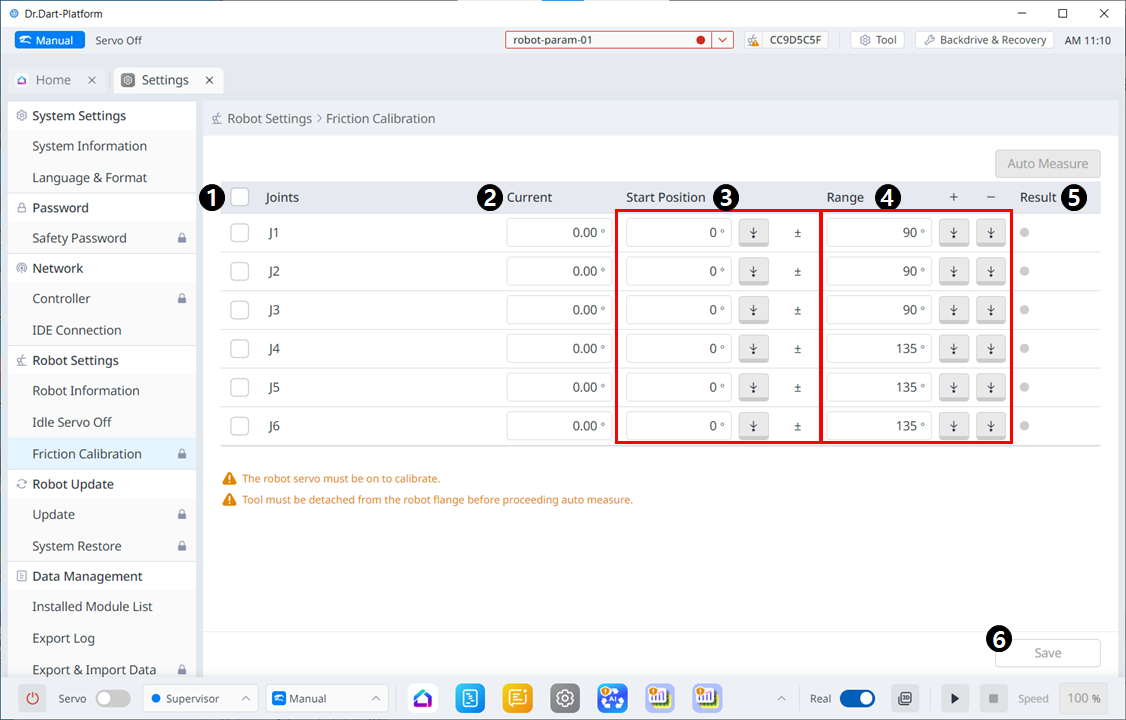
Menu
Elementy | Opis | |
|---|---|---|
| 1 | Pole wyboru połączenia | Wybrać Połączenie z automatycznym pomiarem. |
| 2 | Prąd | Wyświetla aktualną pozycję robota. |
| 3 | Pozycja początkowa | Wprowadź postawę, od której rozpocznie się połączenie podczas wykonywania automatycznego pomiaru. Niewybrane osie również wymagają wprowadzenia. |
| 4 | Zakres | Wprowadź zakres, w którym oś będzie się poruszać. Tylko sprawdzone osie umożliwiają wprowadzanie danych. |
| 5 | Wynik | Wyświetla wyniki pomiarów automatycznych. |
| 6 | Zapisz | Wyniki pomiarów są stosowane do podwładnych. |