Czym jest robot?
Limity funkcjonalne każdej serii robotów
Różne serie robotów (seria A, AS, E, M/H, P) ograniczają korzystanie z następujących funkcji:
Na podstawie prądu: Wykorzystuje się prąd silnika umieszczonego na każdym połączeniu.
Oparte na FTS: Używany jest czujnik momentu obrotowego (FTS) znajdujący się na końcu robota.
Oparte na JTS: Zastosowano JTS (przegubowe czujniki momentu obrotowego) umieszczone na każdym przegubie.
Funkcje | Seria A/E (na podstawie prądu) | Seria A S (prąd, oparty na FTS) | Seria M (oparta na JTS) | Seria H (oparta na JTS) | Seria P (oparta na JTS) |
|---|---|---|---|---|---|
Bezpośrednie nauczanie
| O | O (na podstawie prądu) | O | O | O |
Bezpośrednie nauczanie
| X | O (oparte na FTS) | O | O | O |
Wykrywanie kolizji | O | O (na podstawie prądu) | O | O | O |
Pomiar pozycji instalacji | X | O (oparte na FTS) | O | X (robot może być zainstalowany tylko na podłodze) | X (robot może być zainstalowany tylko na podłodze) |
Pomiar masy narzędzia | X | O (oparte na FTS) | O | O | O |
Pomiar masy przedmiotu obrabianego | X | O (oparte na FTS) | O | O | O |
Funkcja przesuwania | X | X | O | O | O |
Kontrola siły | O (ustawienie dostępne tylko w trzech kierunkach translacji, z wyłączeniem obrotu) | O (oparte na FTS) | O | O | O |
Kontrola zgodności | O (ustawienie dostępne tylko w trzech kierunkach translacji, z wyłączeniem obrotu) | O (oparte na FTS) | O | O | O |
Funkcjonalne limity monitorowania siły dla każdej serii robotów
Manipulator nauczania i DART-Studio mogą być używane do monitorowania danych siły. Polecenie DRL (check_force_condition()) może być również używane do zewnętrznego monitorowania danych siły.
Jeśli tryb paletyzacji jest ustawiony na „WŁ.”: Dostępne są te same funkcje sterowania/monitorowania, które są dostępne w stanie OFF, z wyjątkiem robotów serii H i P.
Funkcje | Seria A/E (na podstawie prądu) | Seria A S (oparta na prądzie i FTS) | Seria M (oparta na JTS) | Seria H (oparta na JTS) | Seria P (oparta na JTS) |
|---|---|---|---|---|---|
Kontrola siły | O (ustawienie dostępne tylko w trzech kierunkach translacji, z wyłączeniem obrotu) | O (oparte na FTS) | O | O | O |
O (jeśli tryb paletyzacji jest ustawiony na „WŁ.”: Ograniczone wyjście sterowania siłą (Base Rx, Ry orientacja) ) | O (jeśli tryb paletyzacji jest ustawiony na „WŁ.”: Ograniczone wyjście sterowania siłą (Base Rx, Ry orientacja) ) | ||||
Kontrola zgodności | O (ustawienie dostępne tylko w trzech kierunkach translacji, z wyłączeniem obrotu) | O (oparte na FTS) | O | O | O |
O (jeśli tryb paletyzacji jest ustawiony na „WŁ.”: Ograniczone wyjście kontroli zgodności (Base Rx, orientacja Ry) ) | O (jeśli tryb paletyzacji jest ustawiony na „WŁ.”: Ograniczone wyjście kontroli zgodności (Base Rx, orientacja Ry) ) | ||||
Monitorowanie siły (Sterowanie manipulatorem) | X | O (oparte na FTS) | O (wartość siły „zero” pokazana dla sekcji osobliwości) | O (wartość siły „zero” pokazana dla sekcji osobliwości) | O (wartość siły „zero” pokazana dla sekcji osobliwości) |
O (jeśli tryb paletyzacji jest ustawiony na „WŁ.”: 4-Degree of Freedom przewidziane dla podstawy (x, y, z, Rz) | O (jeśli tryb paletyzacji jest ustawiony na „WŁ.”: 4-Degree of Freedom przewidziane dla podstawy (x, y, z, Rz) | ||||
Monitorowanie siły (DART-Studio) | O (wartość siły „zero” pokazana dla sekcji osobliwości) | O (oparte na FTS) | O (wartość siły „zero” pokazana dla sekcji osobliwości) | O (wartość siły „zero” pokazana dla sekcji osobliwości) | O (wartość siły „zero” pokazana dla sekcji osobliwości) |
O (jeśli tryb paletyzacji jest ustawiony na „WŁ.”: 4-Degree of Freedom przewidziane dla podstawy (x, y, z, Rz) | O (jeśli tryb paletyzacji jest ustawiony na „WŁ.”: 4-Degree of Freedom przewidziane dla podstawy (x, y, z, Rz) | ||||
Monitorowanie siły (Podczas używania poleceń DRL: | O (wartość siły „zero” pokazana dla sekcji osobliwości) | O (oparte na FTS) | O (wartość siły „zero” pokazana dla sekcji osobliwości) | O (wartość siły „zero” pokazana dla sekcji osobliwości) | O (wartość siły „zero” pokazana dla sekcji osobliwości) |
O (jeśli tryb paletyzacji jest ustawiony na „WŁ.”: 4-Degree of Freedom przewidziane dla podstawy (x, y, z, Rz) | O (jeśli tryb paletyzacji jest ustawiony na „WŁ.”: 4-Degree of Freedom przewidziane dla podstawy (x, y, z, Rz) |
Limit wyjściowy sterowania (Base Rx, Ry orientacja): Wartości kontroli siły lub zgodności odpowiadające wartościom kontroli siły lub zgodności odpowiadającym orientacji Base Rx, Ry nie są wyprowadzane. Wprowadzenie wartości kontroli siły lub zgodności odpowiedniej osi (Base Rx, Ry) zostanie zignorowane jako „zero”.
Przegląd osobliwości
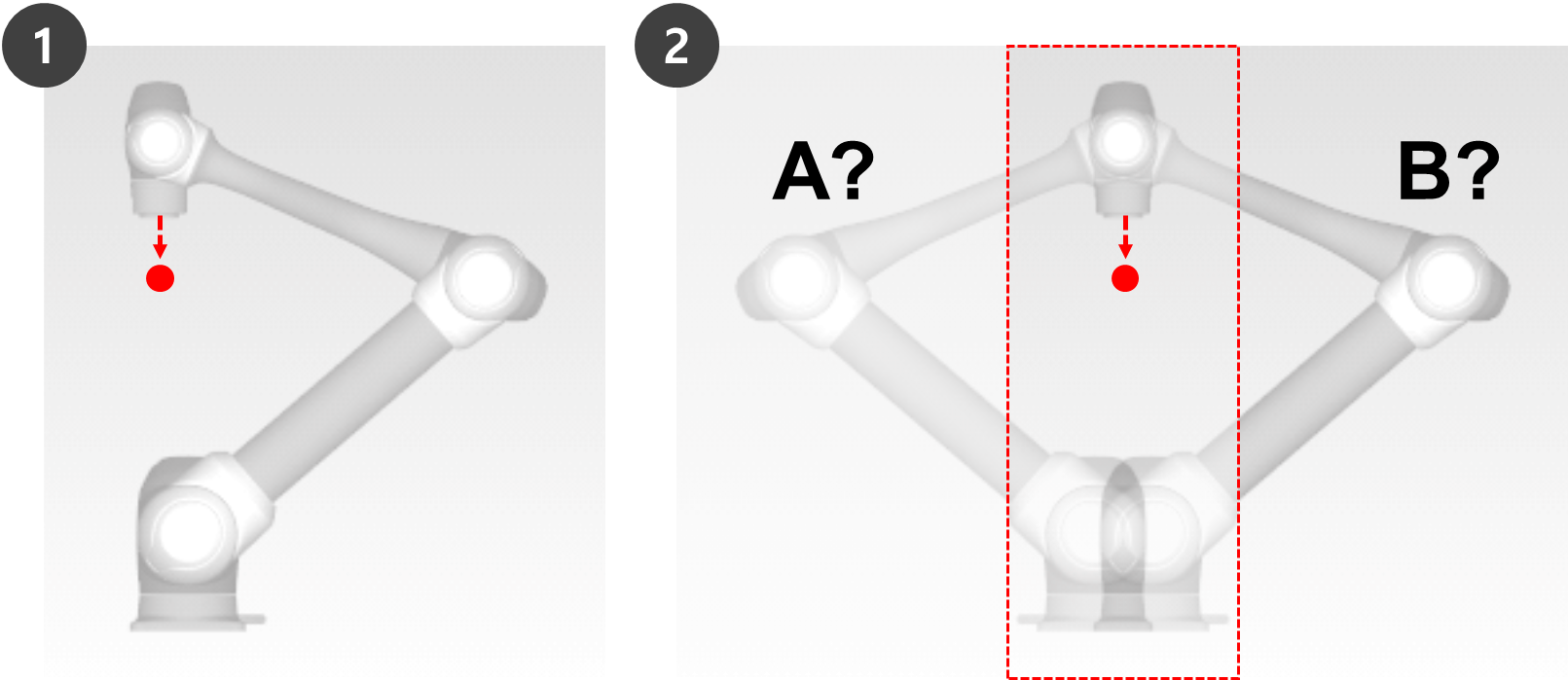
Osobliwość w robocie wieloprzegubowym odnosi się do pozycji (lub punktu w robocie wieloprzegubowym odnosi się do pozycji (lub punktu), w którym robot ma trudności z obliczeniem swojej następnej pozycji podczas ruchu. Roboty wieloprzegubowe obliczają każdy kąt połączenia podczas ruchu w oparciu o koniec robota
Na przykład na rys. Poniżej, gdy robot przesuwa się do czerwonej kropki, robot nie będzie w stanie określić, czy przesunąć swoje połączenia, aby ustawić pozycję A lub pozycję B, jak pokazano na rys. 2. Ta pozycja (lub punkt) nazywana jest osobliwością.
W pobliżu osobliwości ruch robota nie jest płynny pod względem płaszczyzny, punktu i linii, ruch liniowy końca robota może nie być utrzymany, a błąd pozycji podczas sterowania może wzrosnąć. Osobliwość występuje w 3 przypadkach, jak pokazano na poniższym rysunku, w tym gdy połączenia robota tworzą linię.
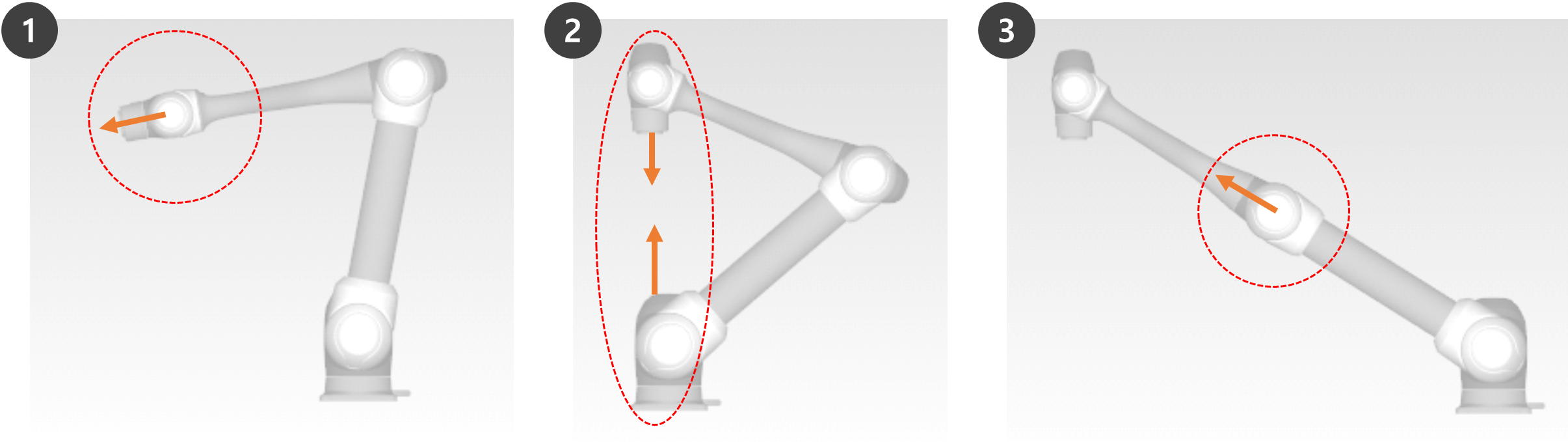
Osobliwość nadgarstka: Gdy nadgarstek robota tworzy linię, gdy oś 5 zbliża się do 0º
W porównaniu do ludzkiego ramienia osie 4, 5 i 6 odpowiadają stawom nadgarstka.
Osobliwość ramion: Gdy osie 6 i 1 znajdują się na tej samej linii
W porównaniu do ludzkiego ramienia, osie 2 odpowiadają stawom barkowym.
Osobliwość łokcia: Gdy robot tworzy linię, gdy oś 3 zbliża się do 0º
W porównaniu do ludzkiego ramienia, oś 3 odpowiada łokciu.
Uwaga
Na operacje ręczne i automatyczne poruszające się z obrotem przegubu nie ma wpływu osobliwość.
Ruch zadania, polecenie MoveL itp.
Osobliwość występuje tylko podczas ręcznej i automatycznej pracy, gdy robot kończy wykonywanie ruchu liniowego.
Ruch przegubu, polecenia MoveJ
W strefie osobliwości kontrola siły lub kontrola zgodności są niedostępne.
Ponieważ prędkość obrotu niektórych osi gwałtownie wzrasta, gdy ruch liniowy przechodzi przez osobliwość, możliwe jest naruszenie limitu prędkości połączenia lub naruszenie limitu kąta połączenia.
Jak uniknąć osobliwości
Roboty Doosan Robotics zapewniają opcje unikania osobliwości podczas kontroli ruchu. Zaleca się jednak skonfigurowanie zadania, które nie tworzy wyjątków za pomocą poleceń ruchu połączenia, takich jak MoveJ w strefach osobliwości.
Oto opcje unikania osobliwości oferowane przez Doosan Robot:
Automatyczne unikanie: Wykonuje ruch unikając osobliwości. Jednak ruch robota może różnić się od oczekiwanej ścieżki.
Priorytet ścieżki: Utrzymuje ścieżkę i prędkość, ale może się zatrzymać z powodu błędu w pobliżu osobliwości.
Zmienna prędkość: Utrzymuje ścieżkę, ale zwalnia w pobliżu osobliwości.
Przegląd kąta Eulera
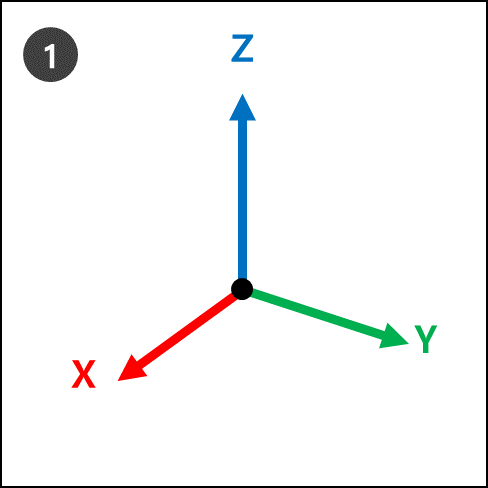
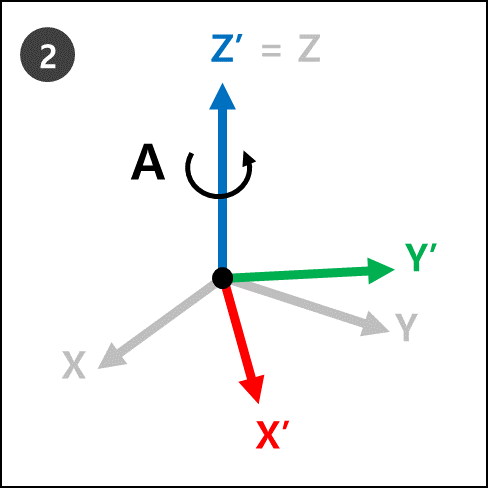
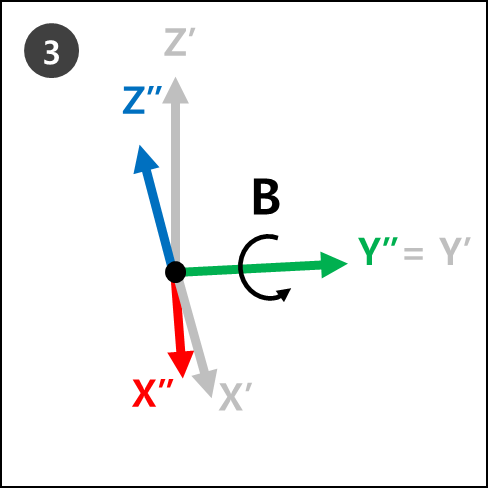
Kąt Eulera jest sposobem wyrażania kątów osi X, Y i z, które są prostopadłe między sobą w kierunku obiektu. A, B i C odnoszą się do następujących po sobie kątów obrotu. Każdy producent robotów definiuje tę kolejność rotacji A, B i C inaczej, np. Rz-Ry-Rz, Rz-Ry-Rx lub Rx-Ry-Rz.
Na przykład Rz-Ry-Rx. W tym przypadku Rz oznacza obrót w osi z, Ry oznacza obrót w osi Y, a Rx oznacza obrót w osi X. RZ może być wyrażona jako kąt A, Ry jako kąt B i Rx jako kąt C, aby wskazać bieżący kierunek obrotów obiektu. Zauważ, że po obróceniu współrzędnych w kierunku osi z obroty będą wykonywane na podstawie nowych współrzędnych.
Można to zwizualizować w krokach od 4 do 1.
 |
 |
 |
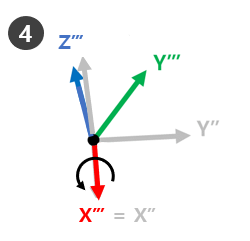 |
Nowe współrzędne (z'''', Y''', X''' w kroku 4 odnoszą się do bieżącego obrotu robota, gdy stosowane są kąty Eulera A, B i C.
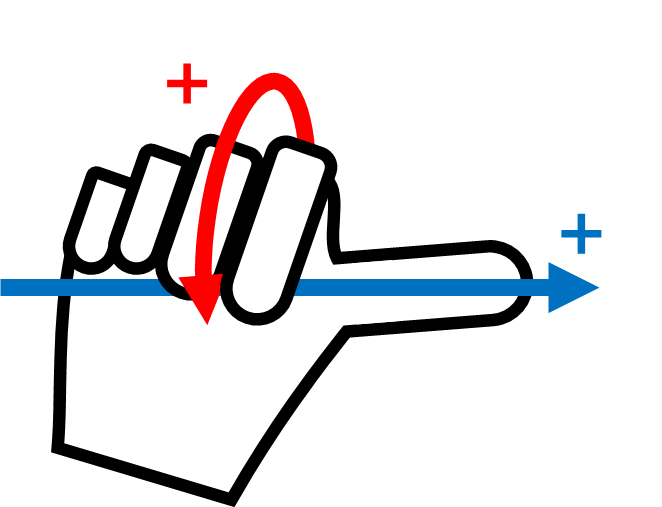
Można to łatwo zwizualizować prawą ręką. Wykonaj następującą pozycję prawą ręką. Nazywa się to regułą prawej ręki, a ustawienie kciuka (oś X), palca wskazującego (oś Y) i środkowego palca (oś z) prostopadle do siebie stworzy współrzędne składające się z osi X, Y i Z.
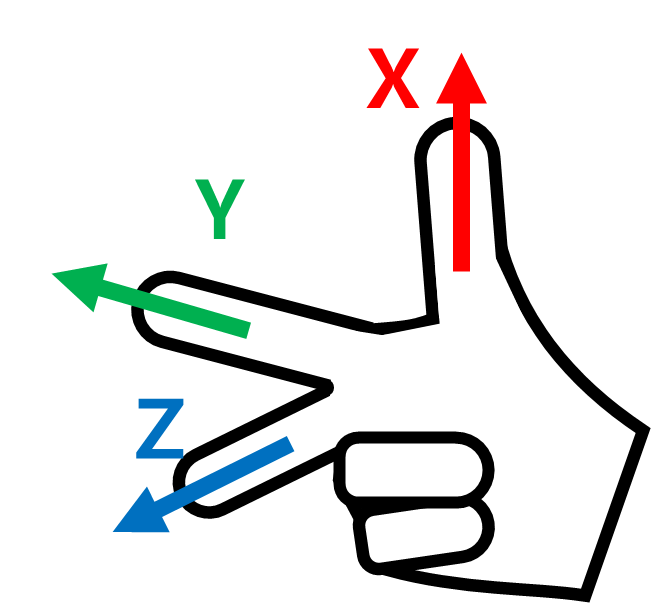
Następnie wykonaj prawą regułę kartezjańską i wykonaj obroty Rz, Ry i Rx w kolejności sekwencyjnej.
RZ: Obrócić środkowy palec (oś z) o stopni.
Y: Obrócić palec wskazujący (oś Y) o B stopni.
RX: Obrócić kciuk (oś X) o C stopni.
Uwaga
Kierunek + obrotu + kierunku obrotu A, B i C jest kierunkiem czterech palców z wyjątkiem kciuka, gdy kciuk jest skierowany w kierunku + i cztery palce są zaciśnięte. Nazywa się to prawem śruby zgodnej z ruchem wskazówek zegara.