Limity robotów i bezpieczeństwo
Ustawienie limitów robota
W oknie Limity robota można ustawić różne limity związane z robotem. Limity te są wykorzystywane do zapewnienia bezpiecznej pracy robota w ustalonych granicach.
Limity robota można ustawić w menu Parametr robota > Ustawienia bezpieczeństwa > Limity robota.
Szczegółowy opis każdego limitu znajduje się w części Limity robota.
Limity robotów są w dużej mierze podzielone na 3 kategorii. Każda kategoria obejmuje następujące ekrany i funkcje.
Menu
Elementy | Opis | |
|---|---|---|
| 1 | Przycisk przełączania blokady | Służy do blokowania ustawionej wartości. Do zmiany ustawionej wartości wymagane jest hasło bezpieczeństwa. |
| 2 | TCP/Robot | Duża klasyfikacja limitów robotów. |
| 3 | Resetuj | Służy do resetowania ustawień. |
| 4 | Siła | Służy do ustawiania siły. |
| 5 | Zasilanie | Służy do ustawiania mocy. |
| 6 | Prędkość | Służy do ustawiania prędkości. |
| 7 | Pędu | Służy do ustawiania pędu. |
| 8 | Kolizja | Służy do ustawiania kolizji. |
| 9 | Zapisz | Służy do zapisania odpowiedniego ustawienia. |
Menu
Elementy | Opis | |
|---|---|---|
| 1 | Przycisk przełączania blokady | Służy do blokowania ustawionej wartości. Do zmiany ustawionej wartości wymagane jest hasło bezpieczeństwa. |
| 2 | Prędkość połączenia | Duża klasyfikacja limitów robotów. |
| 3 | Resetuj | Służy do resetowania ustawień. |
| 4 | J1 | Służy do ustawiania ustawień odpowiednio dla trybów Normal i Reduced. |
| 5 | J2 | Służy do ustawiania ustawień odpowiednio dla trybów Normal i Reduced. |
| 6 | J3 | Służy do ustawiania ustawień odpowiednio dla trybów Normal i Reduced. |
| 7 | J4 (nieaktywny w modelach z serii P) | Służy do ustawiania ustawień odpowiednio dla trybów Normal i Reduced. |
| 8 | J5 | Służy do ustawiania ustawień odpowiednio dla trybów Normal i Reduced. |
| 9 | J6 | Służy do ustawiania ustawień odpowiednio dla trybów Normal i Reduced. |
| 10 | Zapisz | Służy do zapisania odpowiedniego ustawienia. |
Menu
Elementy | Opis | |
|---|---|---|
| 1 | Przycisk przełączania blokady | Służy do blokowania ustawionej wartości. Do zmiany ustawionej wartości wymagane jest hasło bezpieczeństwa. |
| 2 | Kąt połączenia | Duża klasyfikacja limitów robotów. |
| 3 | Resetuj | Służy do resetowania ustawień. |
| 4 | J1 | Służy do ustawiania ustawień odpowiednio dla trybów Normal i Reduced. |
| 5 | J2 | Służy do ustawiania ustawień odpowiednio dla trybów Normal i Reduced. |
| 6 | J3 | Służy do ustawiania ustawień odpowiednio dla trybów Normal i Reduced. |
| 7 | J4 (nieaktywny w modelach z serii P) | Służy do ustawiania ustawień odpowiednio dla trybów Normal i Reduced. |
| 8 | J5 | Służy do ustawiania ustawień odpowiednio dla trybów Normal i Reduced. |
| 9 | J6 | Służy do ustawiania ustawień odpowiednio dla trybów Normal i Reduced. |
| 10 | Zapisz | Służy do zapisania odpowiedniego ustawienia. |
Bezpieczeństwo we/wy
Funkcja ta służy do wprowadzania/wysyłania sygnałów związanych z bezpieczeństwem do nadmiarowych zacisków. Jeśli którykolwiek z sygnałów wejściowych/wyjściowych bezpieczeństwa zostanie wykryty jako inny sygnał nadmiarowy, oznacza to przerwę w obwodzie lub awarię sprzętu i zatrzymuje robota w trybie STO STOP.
Aby ustawić wejścia/wyjścia bezpieczeństwa, wybierz kolejno Parametry robota > Ustawienia bezpieczeństwa > WE/Wy bezpieczeństwa.
Więcej informacji można znaleźć w części WE/Wy sygnału bezpieczeństwa .
Wejście
Menu
Elementy | Opis | |
|---|---|---|
| 1 | Przycisk przełączania blokady | Służy do blokowania ustawionej wartości. Do zmiany ustawionej wartości wymagane jest hasło bezpieczeństwa. |
| 2 | Wejście/wyjście | Do ustawienia można wybrać jedno z wejść/wyjść. |
| 3 | Ustawienie sygnału | Opcje ustawione dla każdego portu. Nieużywane |
| 4 | Wybierz, czy sygnał ma być ignorowany w zależności od stanu robota | Po wybraniu sygnału „Zatrzymanie ochronne” można określić, czy wybrany sygnał ma być ignorowany w stanach robota „RĘCZNY, ODZYSK, HGC”. |
| 5 | Ustawić tempo zwalniania | Można ustawić tempo zwalniania. Może to być od 100 do 0. |
| 6 | Zapisz | Ten przycisk umożliwia zapisanie wprowadzonego ustawienia. |
Wyjście
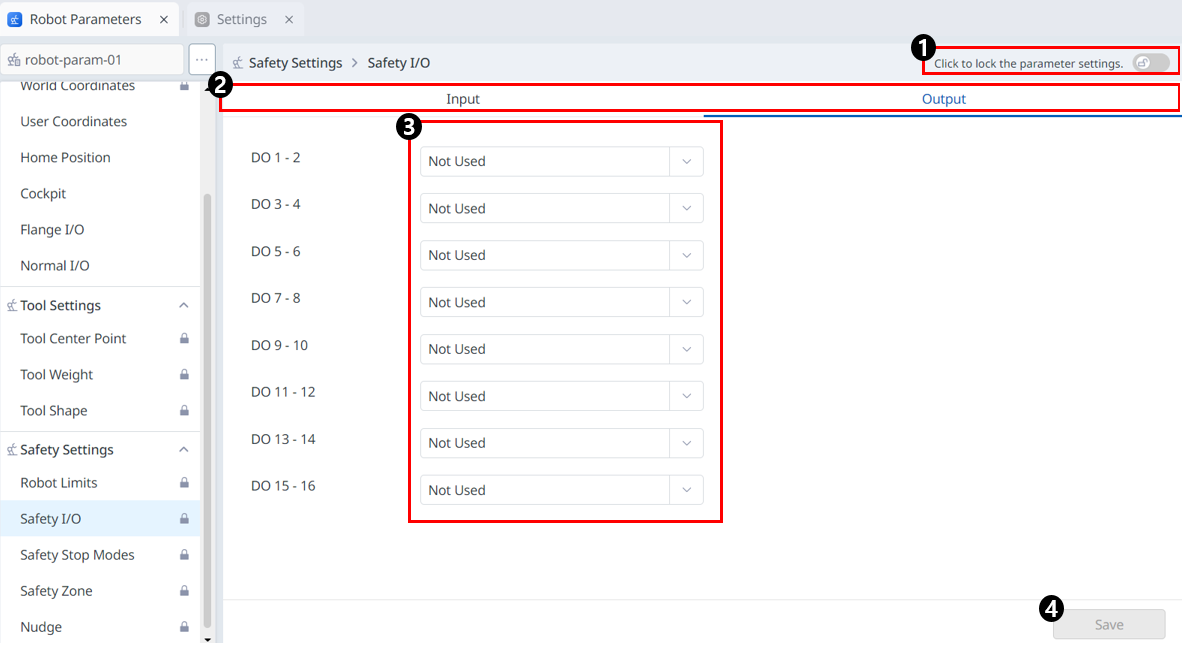
Menu
Elementy | Opis | |
|---|---|---|
| 1 | Przycisk przełączania blokady | Służy do blokowania ustawionej wartości. Do zmiany ustawionej wartości wymagane jest hasło bezpieczeństwa. |
| 2 | Wejście/wyjście | Do ustawienia można wybrać jedno z wejść/wyjść. |
| 3 | Ustawienie sygnału | Opcje ustawione dla każdego portu. Nieużywane |
| 4 | Zapisz | Ten przycisk umożliwia zapisanie wprowadzonego ustawienia. |
Ustawienia trybów zatrzymania awaryjnego
Poznanie typów ograniczników bezpieczeństwa oraz sposobu włączania/wyłączania ogranicznika bezpieczeństwa.
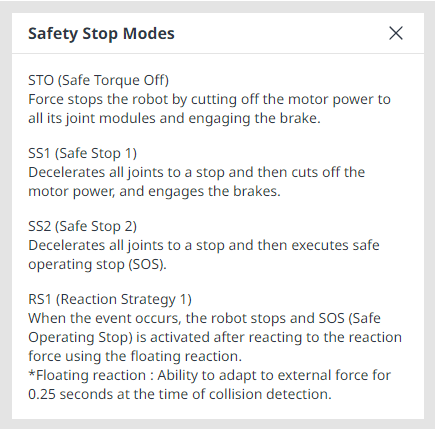
Rodzaje przystanków bezpieczeństwa
Dostępne tryby zatrzymania zapewniające bezpieczeństwo użytkownika są następujące:
STO (bezpieczny moment obrotowy wyłączony): Zatrzymuje Servo Off (zasilanie silnika jest natychmiast wyłączane)
SS1 (Bezpieczne zatrzymanie 1): Serwomechanizm wyłączony po zatrzymaniu maksymalnego zwalniania
SS2 (bezpieczne zatrzymanie 2): Tryb gotowości po zatrzymaniu maksymalnego zwalniania (pauza)
RS1: W przypadku kolizji, jest zgodny z kierunkiem przeciwnym do kolizji, a następnie przechodzi w tryb gotowości (można ustawić tylko w przypadku naruszenia limitu siły TCP/wykrywania kolizji)
Roboty Doosan Robotics mają dwa rodzaje funkcji zatrzymania bezpieczeństwa. Zatrzymanie awaryjne jest używane w ogólnych sytuacjach awaryjnych, a robot może wznowić pracę przy włączonym serwo po zwolnieniu zatrzymania awaryjnego. W przypadku zatrzymania ochronnego robot może wznowić pracę, usuwając przyczynę zatrzymania ochronnego i zwalniając ogranicznik.
Zatrzymanie awaryjne: Ustawia tryb zatrzymania po uaktywnieniu przycisku zatrzymania awaryjnego manipulatora nauczania lub dodatkowo zainstalowanego urządzenia zewnętrznego
Włącza się po naciśnięciu przełącznika zatrzymania awaryjnego manipulatora nauczania lub przełącznika podłączonego do terminalu TBSFT EM.
Można wybrać tylko STO lub SS1.
Ogranicznik ochronny: Ustawia tryb zatrzymania, gdy urządzenie zabezpieczające podłączone zewnętrznie jest włączone
Aktywuje się, gdy urządzenie zabezpieczające podłączone do terminalu TBSFT PR jest włączone.
Aby uzyskać więcej informacji na temat funkcji zatrzymania awaryjnego, patrz Funkcje bezpieczeństwa.
Włączanie/wyłączanie blokady bezpieczeństwa
Naciśnij przycisk zatrzymania awaryjnego na manipulatorze nauczania lub włącz urządzenie zabezpieczające podłączone do WE/Wy bezpieczeństwa, aby włączyć zatrzymanie awaryjne. Urządzenia zabezpieczające można podłączyć do zatrzymania awaryjnego lub zatrzymania ochronnego za pomocą menu Parametry robota > Ustawienia bezpieczeństwa > Funkcje wejścia/wyjścia bezpieczeństwa ekranu manipulatora uczenia.
Więcej informacji na temat podłączania urządzenia zabezpieczającego do WE/Wy bezpieczeństwa można znaleźć w części Podłączanie WE/Wy kontrolera.
Informacje na temat ustawiania funkcji zatrzymania bezpieczeństwa dla tego połączenia w programie można znaleźć w części WE/Wy sygnału bezpieczeństwa.
Menu
Elementy | Opis | |
|---|---|---|
| 1 | Przycisk przełączania blokady | Służy do blokowania ustawionej wartości. Do zmiany ustawionej wartości wymagane jest hasło bezpieczeństwa. |
| 2 | Komunikat informacyjny | Komunikat zawierający informacje niezbędne do ustawienia. |
| 3 | Resetuj | Przycisk służący do resetowania ustawień. |
| 4 | Zatrzymanie awaryjne | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane obejmują: STO SS1 |
| 5 | Ogranicznik ochronny | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane obejmują: SS1 SS2 |
| 6 | Naruszenie limitu kąta połączenia | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane obejmują: STO SS1 SS2 |
| 7 | Naruszenie limitu prędkości połączenia | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane obejmują: Sto (z wyjątkiem serii H/P) SS1 SS2 |
| 8 | Naruszenie limitu momentu obrotowego połączenia | Dostępne jest tylko STO. |
| 9 | Wykrywanie kolizji | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane obejmują: Sto (z wyjątkiem serii H/P) SS1 SS2 RS1 |
| 10 | Naruszenie limitu pozycji robota TCP | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane obejmują: STO SS1 SS2 |
| 11 | Naruszenie limitu orientacji TCP | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane obejmują: Sto (z wyjątkiem serii H/P) SS1 SS2 |
| 12 | Naruszenie limitu prędkości TCP | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane zawiera następujące elementy: Sto (z wyjątkiem serii H/P) SS1 SS2 |
| 13 | Naruszenie limitu siły TCP | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane obejmują: Sto (z wyjątkiem serii H/P) SS1 SS2 |
| 14 | Naruszenie limitu momentum | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane obejmują: Sto (z wyjątkiem serii H/P) SS1 SS2 |
| 15 | Naruszenie limitu mechanicznego | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane obejmują: Sto (z wyjątkiem serii H/P) SS1 SS2 |
| 16 | Zapisz | Ten przycisk umożliwia zapisanie wartości ustawień. |
Uwaga
W komunikacie informacyjnym zostanie wyświetlone następujące okno podręczne: