
Moduł odzyskiwania
Moduł odzyskiwania: Jeśli wystąpi błąd związany z ciągłym naruszeniem bezpieczeństwa lub jeśli robot musi zostać zapakowany do transportu, użytkownik może użyć trybu odzyskiwania bezpieczeństwa w celu skonfigurowania pozycji i kąta robota.

Aby uzyskać dostęp do modułu odzyskiwania, dotknij przycisku Odzyskiwanie znajdującego się u dołu.
Odzyskiwanie oprogramowania: W stanie Servo Off (Servo Off), jeśli wystąpi błąd naruszenia bezpieczeństwa spowodowany naruszeniami bezpieczeństwa związanymi z pozycją, takimi jak opuszczenie obszaru pracy lub naruszenie obszarów zabronionych, lub gdy robot zostanie zatrzymany z powodu zderzenia ze stałym obiektem, nie można ustawić Servo On lub Jog nawet podczas próby zresetowania robota do normalnego stanu za pomocą programu Jog lub programu. W takich przypadkach tryb odzyskiwania oprogramowania służy do resetowania robota do normalnego stanu.
Tryb pakowania: W przypadku pakowania i transportu robota można ustawić wstępnie zdefiniowane wartości (które wykraczają poza normalny kąt pracy) podczas transportu.
Jeśli serwomechanizm jest włączony po uruchomieniu modułu odzyskiwania, pojawi się następujące okno podręczne i serwomechanizm zostanie automatycznie wyłączony.
Korzystanie z trybu odzyskiwania oprogramowania
Tryb odzyskiwania oprogramowania
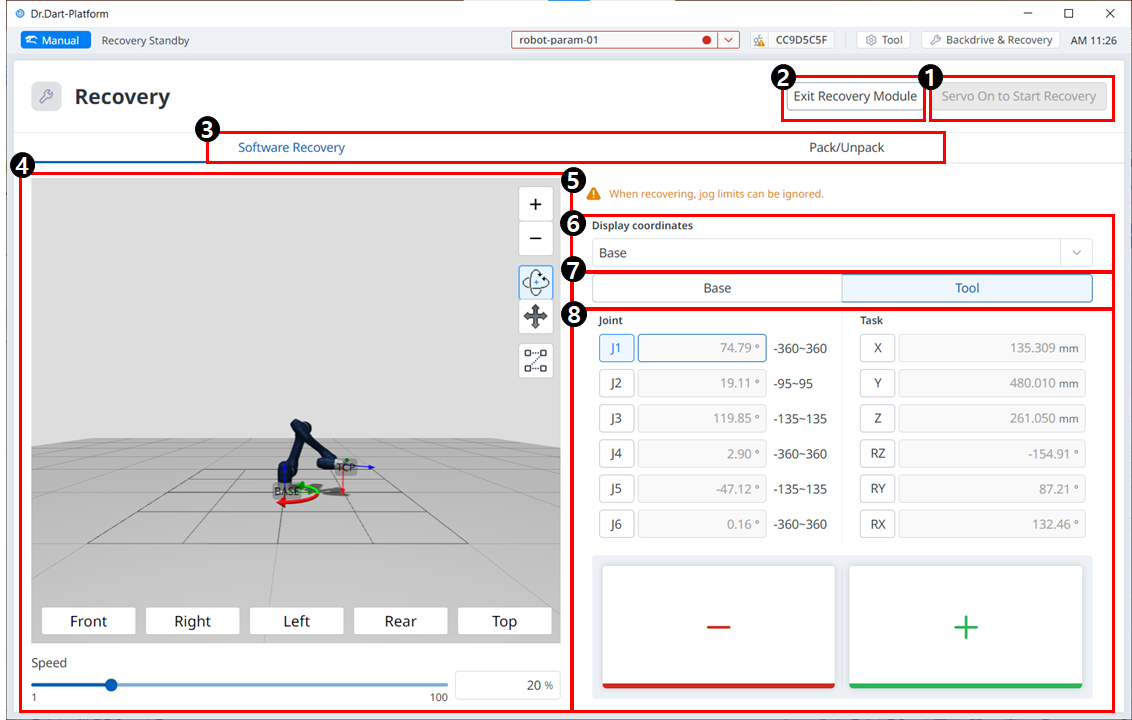
Menu
Elementy | Opis | |
|---|---|---|
| 1 | Serwomechanizm włączony, aby rozpocząć odzyskiwanie | Jest to przycisk umożliwiający włączenie serwomechanizmu przed przejściem do trybu odzyskiwania. |
| 2 | Zakończ odzyskiwanie | Ten przycisk umożliwia wyjście z modułu odzyskiwania. |
| 3 | Nagłówek | W tej sekcji można wybrać tryb odzyskiwania oprogramowania lub tryb pakowania/rozpakowywania. |
| 4 | Symulacja 3D. | Obszar ten umożliwia podgląd symulacji 3D ustawionych wartości. |
| 5 | Komunikat ostrzegawczy | Wyjaśnia to środki ostrożności. |
| 6 | Wyświetl współrzędne | W tym miejscu można ustawić współrzędne w oparciu o bazę lub Świat. |
| 7 | Przycisk bazy/narzędzia | W tym miejscu można ustawić wartość na podstawie bazy lub narzędzia. |
| 8 | Połączenie/zadanie | W tej sekcji można wprowadzić żądane wartości, aby robot mógł się poruszać. |
Aby skorzystać z trybu odzyskiwania oprogramowania, wykonaj następujące czynności:
Dotknij menu Odzyskiwanie w okienku nagłówka. Ekran odzyskiwania oprogramowania pojawi się automatycznie w oknie Odzyskiwanie.
Dotknij każdego przycisku połączenia po prawej stronie ekranu odzyskiwania oprogramowania i

 ustaw pozycję za pomocą przycisków . Lub naciśnij przyciski kokpitu, aby wyregulować kąt połączenia poprzez bezpośrednie nauczanie.
ustaw pozycję za pomocą przycisków . Lub naciśnij przyciski kokpitu, aby wyregulować kąt połączenia poprzez bezpośrednie nauczanie.Definicje przycisków w kokpicie znajdują się w części Cockpit
Zmiany wprowadzone w ustawieniach są odzwierciedlane w oknie symulacji po lewej stronie w czasie rzeczywistym.
Po zakończeniu ustawiania dotknij przycisku X w lewym górnym rogu, aby zamknąć okno.
Uwaga
Tryb naprawy oprogramowania nie jest dostępny, gdy limit kąta połączenia zostanie przekroczony o 3 stopni.
Korzystanie z opcji Pakuj/rozpakuj
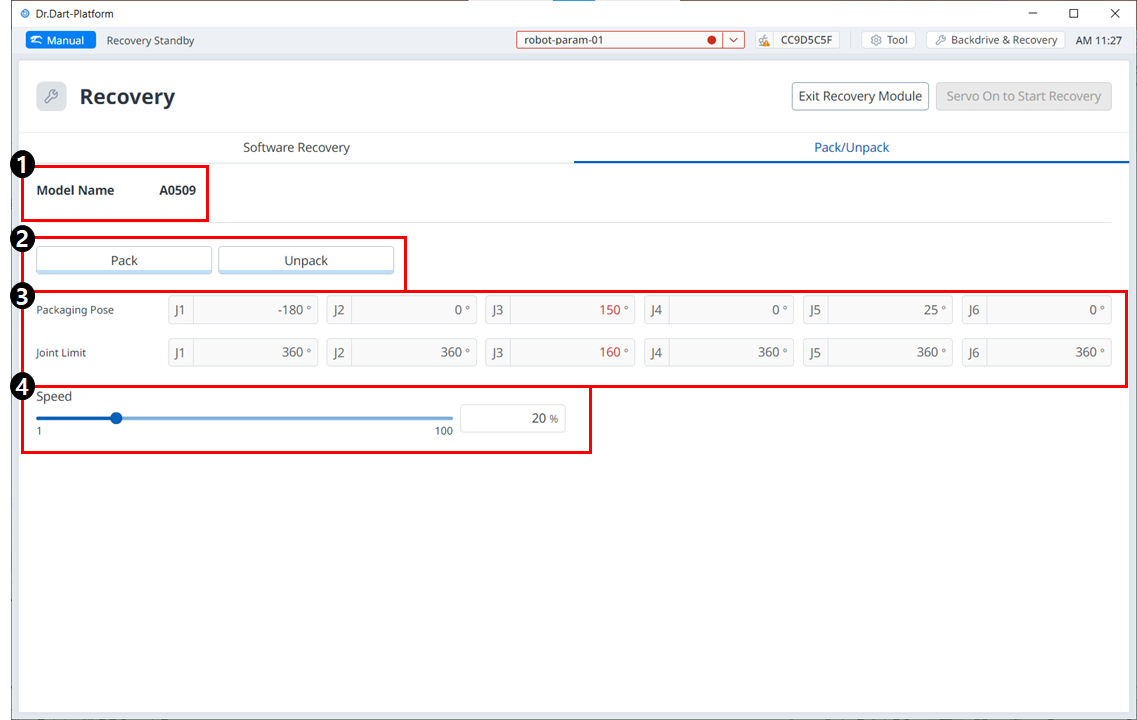
Menu
Elementy | Opis | |
|---|---|---|
| 1 | Nazwa modelu | Zostanie wyświetlona nazwa podłączonego modelu robota. |
| 2 | Pakuj/rozpakuj | Można wybrać opcję Pakuj lub rozpakuj. |
| 3 | Limit pozycji/połączenia opakowania | Pojawią się wartości graniczne pozycji i stawów. |
| 4 | Współczynnik prędkości | Prędkość trybu pakowania lub rozpakowywania można regulować za pomocą suwaka lub wejścia. |
Aby skonfigurować tryb pakowania, wykonaj następujące czynności:
Dotknij menu Odzyskiwanie w okienku nagłówka.

Wybierz kartę Tryb pakowania.

Dotknij przycisku Servo On, aby uruchomić odzyskiwanie, aby włączyć tryb pakowania.

Robot automatycznie przesuwa się do ustawionej pozycji opakowania.
Przycisk Pack (Pakowanie) umożliwia ustawienie robota w pozycji Pack, a przycisk Unpack (Rozpakuj) umożliwia ustawienie robota w domyślnej pozycji wyjściowej.