
Przenieś panel
Menu
Elementy | Opis | |
|---|---|---|
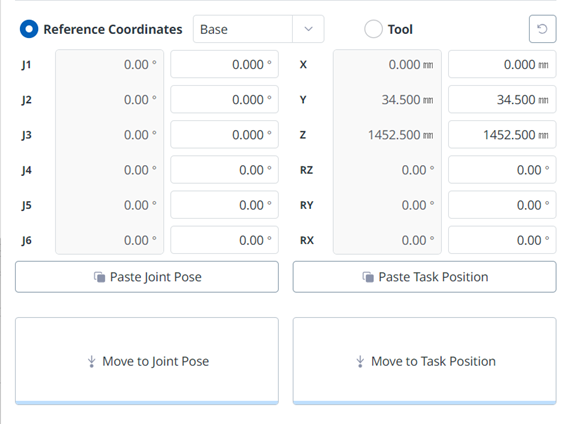
16 | Wybrać układ współrzędnych odniesienia | Wybierz referencyjny układ współrzędnych, który ma być użyty dla współrzędnych zadania na rysunku 18. Możesz wybrać współrzędne bazy, Świata lub użytkownika. |
17 | Pozycja stawów | Wyświetla aktualną postawę robota i docelową postawę stawu. |
18 | Pozycja zadania | Wyświetla aktualną pozycję robota i docelową pozycję zadania, które pasują do wybranego referencyjnego układu współrzędnych. |
19 | Wklej pozycję połączenia | Wklej wartość postawy skopiowaną do schowka do panelu postawy stawu. |
20 | Wklej pozycję zadania | Wklej wartość postawy skopiowaną do schowka do panelu postawy zadania. |
21 | Przycisk Joint Move | Ten przycisk powoduje, że robot przesuwa się do docelowej pozycji stawu. |
22 | Przycisk Przenieś zadania | Ten przycisk powoduje przesunięcie robota do pozycji docelowej zadania. |
Ustawienie kąta przesunięcia
Aby przesunąć robota pod określonym kątem, wykonaj następujące czynności:
Wybierz kartę Przenieś.
Wprowadzić docelowy kąt połączenia robota. (J4 jest wyłączony w modelach serii P)
Włącz tryb rzeczywisty.
Dotknij i przytrzymaj przycisk Przenieś do odpowiedniej pozycji połączenia, aby wyregulować kąt połączenia robota.
Ustawianie współrzędnych odniesienia bazy do przeniesienia
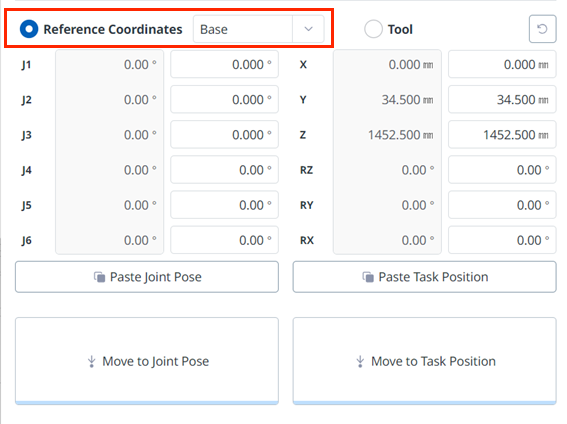
Aby przesunąć robota na podstawie jego współrzędnych bazowych, wykonaj następujące czynności:
Wybrać kartę Przenieś i Współrzędne odniesienia.
Wybierz współrzędną wyświetlania jako bazę.
Dotknij i przytrzymaj przycisk Przenieś do odpowiedniej pozycji zadania, aby przejść do ustawionych współrzędnych.
Ustawianie współrzędnych Świata współrzędnych odniesienia do przeniesienia
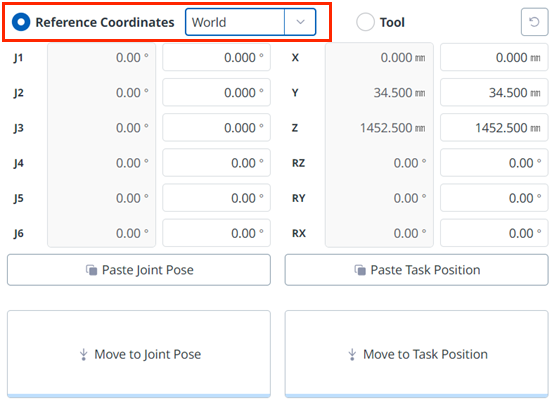
Aby przenieść robota na podstawie współrzędnych świata, wykonaj następujące czynności:
Wybrać kartę Przenieś i Współrzędne odniesienia.
Wybierz Świat jako współrzędne wyświetlania i wybierz kartę Świat.
Skonfiguruj pozycję do poruszania się w odniesieniu do współrzędnych Świata.
Dotknij i przytrzymaj przycisk Przenieś do odpowiedniej pozycji zadania, aby przejść do ustawionych współrzędnych.
Ustawianie współrzędnych do przenoszenia na podstawie narzędzia
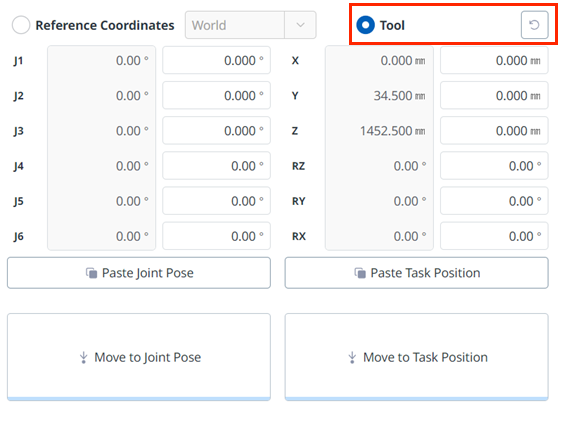
Aby przesunąć robota w oparciu o współrzędne narzędzia, wykonaj następujące czynności:
Wybierz kartę Przenieś i wybierz kartę Narzędzie.
Skonfiguruj pozycję, która ma być przesunięta w odniesieniu do narzędzia.
Dotknij i przytrzymaj przycisk Przenieś do odpowiedniej pozycji zadania, aby przejść do ustawionych współrzędnych.