
STEROWNIK DC (CS-12P)
Wprowadzenie do produktu (CS-12P)
Nazwa każdej części i funkcji
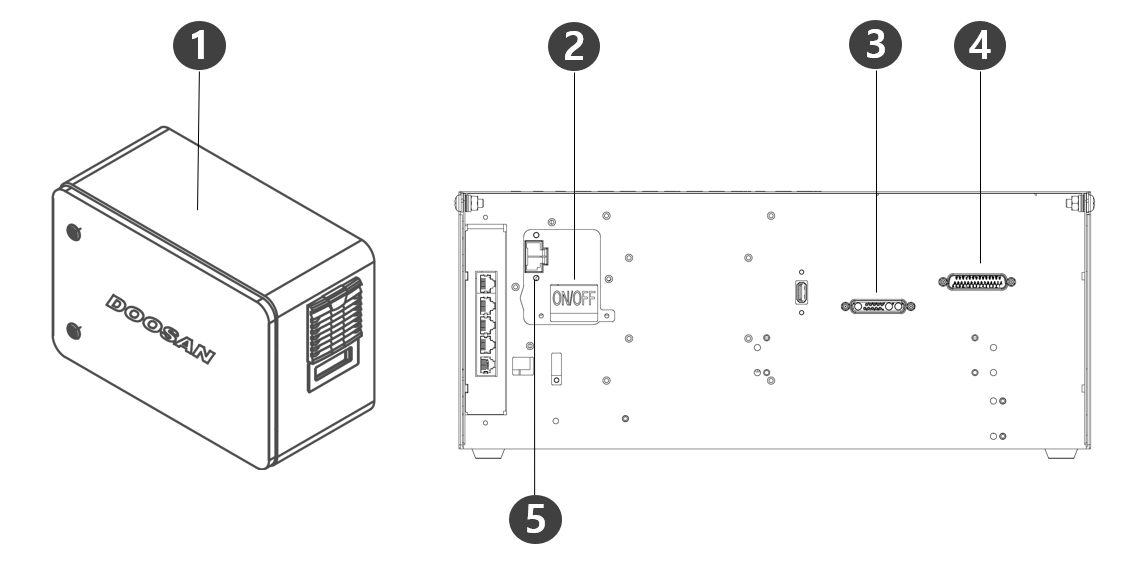
No. | Elementy | Opis |
1 | Złącze we/wy (wewnętrzne) | Może być połączony ze sterownikami innych robotów lub urządzeniami peryferyjnymi. |
2 | Przełącznik zasilania | Służy do WŁĄCZANIA/wyłączania głównego zasilania sterownika . |
3 | Terminal do podłączenia kabla manipulatora | Służy do podłączania kabla manipulatora nauczania do sterownika. |
4 | zacisk przyłączeniowy przewodu robota | Służy do podłączenia kabla robota do sterownika. |
5 | Złącze zasilania | Służy do podłączenia zasilania sterownika. |
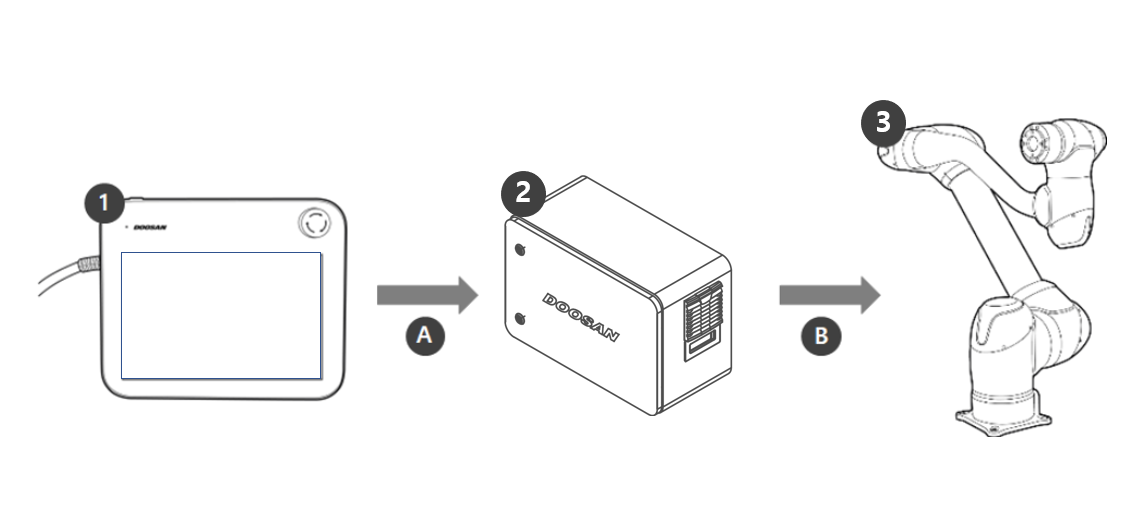
Konfiguracja systemu
No. | Nazwa | Opis |
|---|---|---|
1 | Sterowanie manipulatorem | To urządzenie zarządza całym systemem i jest w stanie nauczyć robota konkretnych pozycji lub dokonać ustawień związanych z manipulatorami i kontrolerami. |
2 | Sterownik | Steruje ruchem robota w zależności od pozycji lub ruchu ustawionego przez manipulator nauczania. Posiada różne porty i/o, które umożliwiają podłączenie i korzystanie z różnych urządzeń i urządzeń. |
3 | Manipulator | Jest to przemysłowy robot współpracujący, który może wykonywać zadania transportowe lub montażowe za pomocą różnych narzędzi. |
A. | Sterowanie/monitorowanie | |
B. | Zasilanie/sieć |
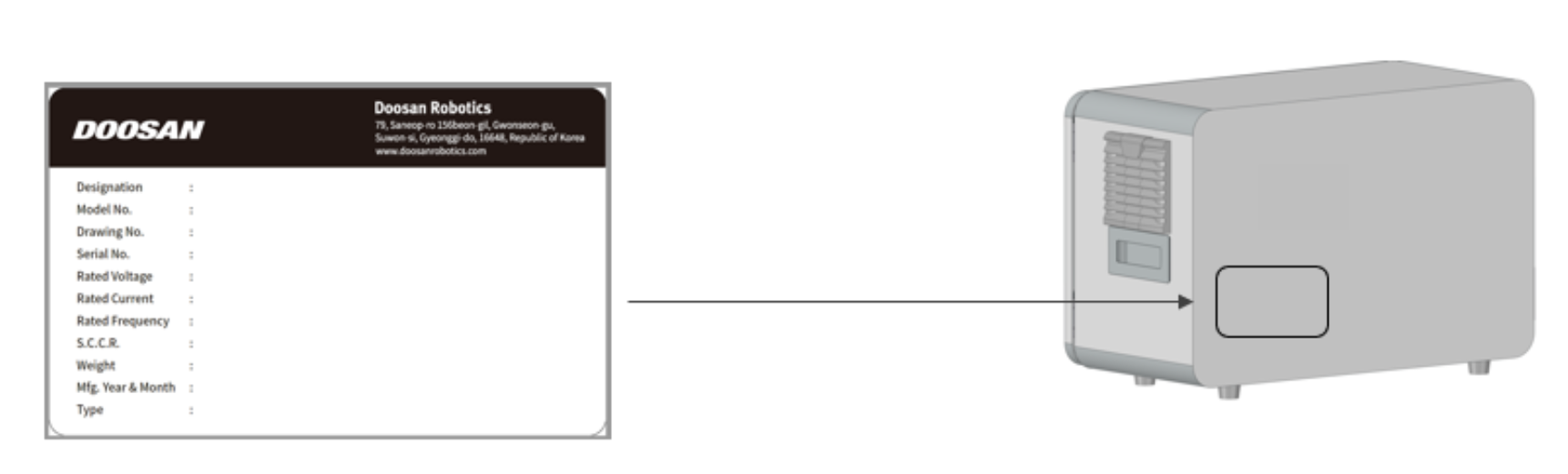
Tabliczka znamionowa i etykieta
Instalacja (CS-12P)
Przestrogi podczas instalacji
Uwaga
Przed zainstalowaniem kontrolera należy zabezpieczyć wystarczającą ilość miejsca. Jeśli nie ma wystarczającej ilości miejsca, kontroler może być uszkodzony lub może zabraknąć kabla manipulatora lub kabla manipulatora manipulatora manipulatora lub sterownika.
Sprawdź zasilanie wejściowe podczas podłączania zasilania do urządzenia. Jeśli podłączony zasilacz wejściowy różni się od znamionowego źródła zasilania (22-60VDC), wiele urządzeń nie działa prawidłowo lub sterownik może być uszkodzony.
Środowisko instalacji
Podczas instalowania kontrolera należy wziąć pod uwagę następujące kwestie.
Przed zainstalowaniem kontrolera należy zabezpieczyć wystarczającą ilość miejsca.
Sterownik musi być zamocowany.
Upewnić się, że żaden element nie jest zamocowany w pojeździe przenośnym.
Instalacja sprzętu
Przed uruchomieniem manipulatora należy zainstalować robota, sterownik i manipulator dydaktyczny, najważniejsze elementy systemu i dostarczyć im zasilanie. Instrukcja montażu każdego elementu jest następująca:
Podłączanie manipulatora do sterownika
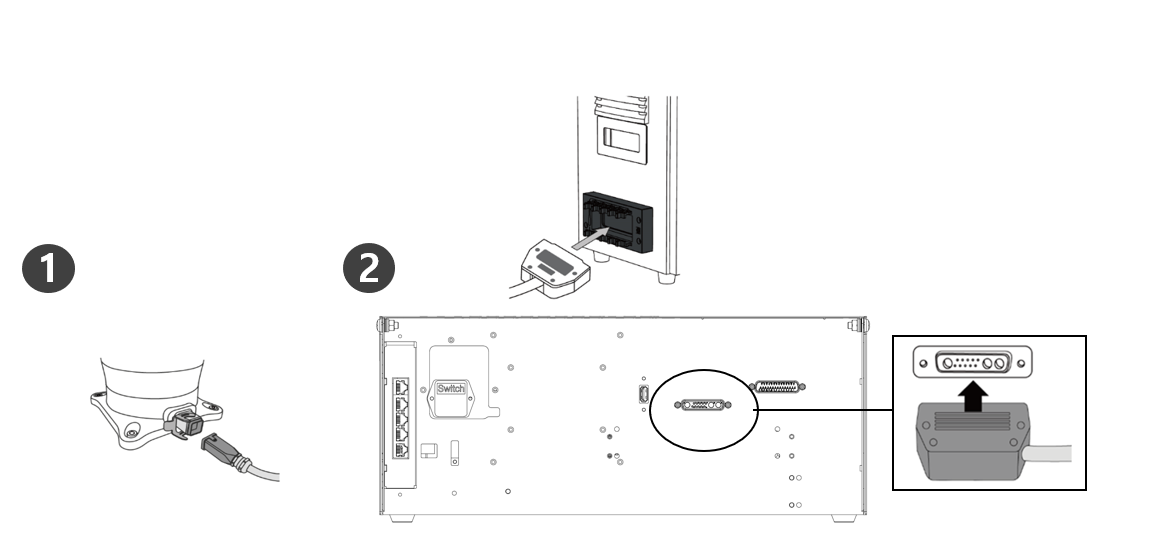
Opis | |
|---|---|
1 | Podłączyć kabel manipulatora do sterownika i założyć pierścień zabezpieczający
|
2 | Podłączanie przeciwległego końca kabla połączeniowego manipulatora do sterownika
|
Uwaga
Nie odłączaj kabla manipulatora, gdy robot jest włączony. Może to spowodować nieprawidłowe działanie robota.
Nie wolno dokonywać żadnych modyfikacji ani przedłużeń kabla manipulatora.
Montując sterownik na podłodze, zabezpieczyć co najmniej 50 mm prześwitu z każdej strony, aby zapewnić odpowiednią wentylację.
Przed włączeniem sterownika należy upewnić się, że złącza są prawidłowo zablokowane.
Uwaga
Podczas konfigurowania systemu zaleca się zainstalowanie reduktora szumów, aby zapobiec zakłóceniom i zakłóceniom działania systemu.
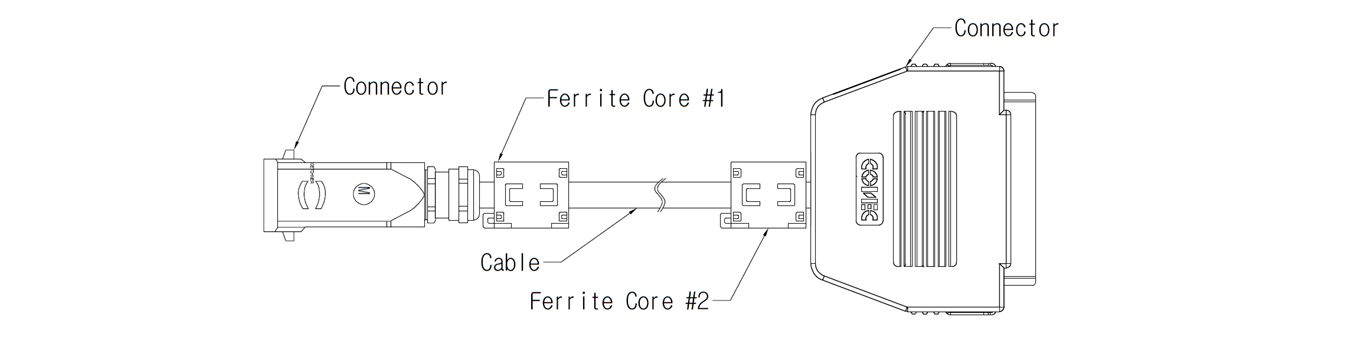
Jeśli na sterownik wpływa hałas generowany przez fale elektromagnetyczne, konieczne jest zainstalowanie rdzenia ferrytowego w celu zapewnienia normalnego działania. Lokalizacja instalacji jest następująca:
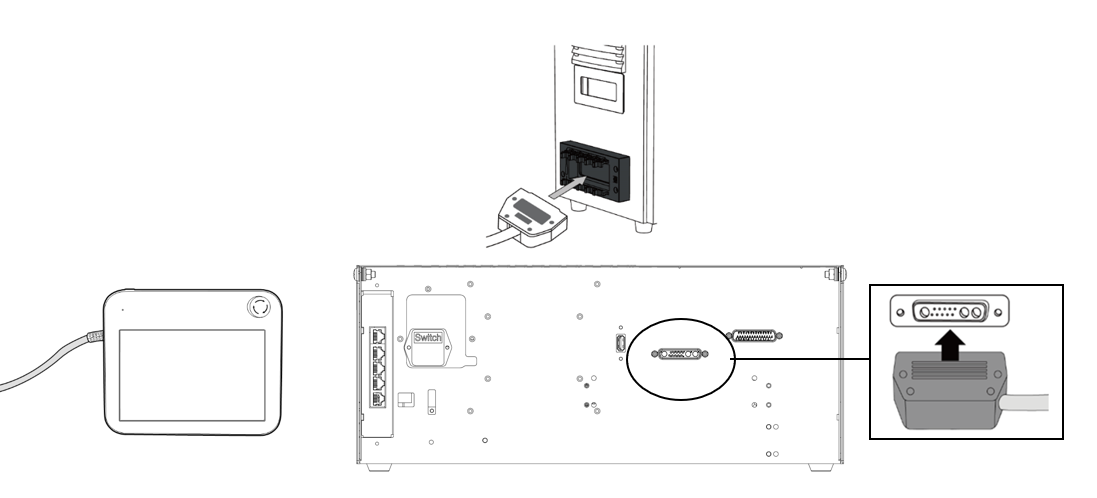
Podłącz kontroler, aby zaprogramować manipulator
Podłącz kabel manipulatora TEACH do odpowiednich złączy kontrolera, aż do kliknięcia i upewnij się, że kabel jest mocno podłączony.
Uwaga
Podczas podłączania kabla przed podłączeniem sprawdzić kształt połączenia, aby sworzeń nie zginał się.
Jeśli manipulator jest używany przez zawieszenie na pojeździe mobilnym lub na sterowniku, należy uważać, aby nie potknąć się o kable łączące.
Należy uważać, aby sterownik, sterownik i kabel nie zetknęły się z wodą.
Nie należy instalować kontrolera i uczyć manipulatora w warunkach zapylenia lub mokrej pracy.
Kontrolery i inteligentny manipulator nigdy nie mogą być narażone na działanie kurzu o temperaturze powyżej IP20 stopni. Należy zachować szczególną ostrożność w środowiskach z przewodzącym kurzem.
Uwaga
Podczas konfigurowania systemu zaleca się zainstalowanie reduktora szumów, aby zapobiec zakłóceniom i zakłóceniom działania systemu.
Jeśli manipulator nauczania jest pod wpływem szumu generowanego przez fale elektromagnetyczne, konieczne jest zainstalowanie rdzenia ferrytowego w celu zapewnienia normalnego działania. Lokalizacja instalacji jest następująca:
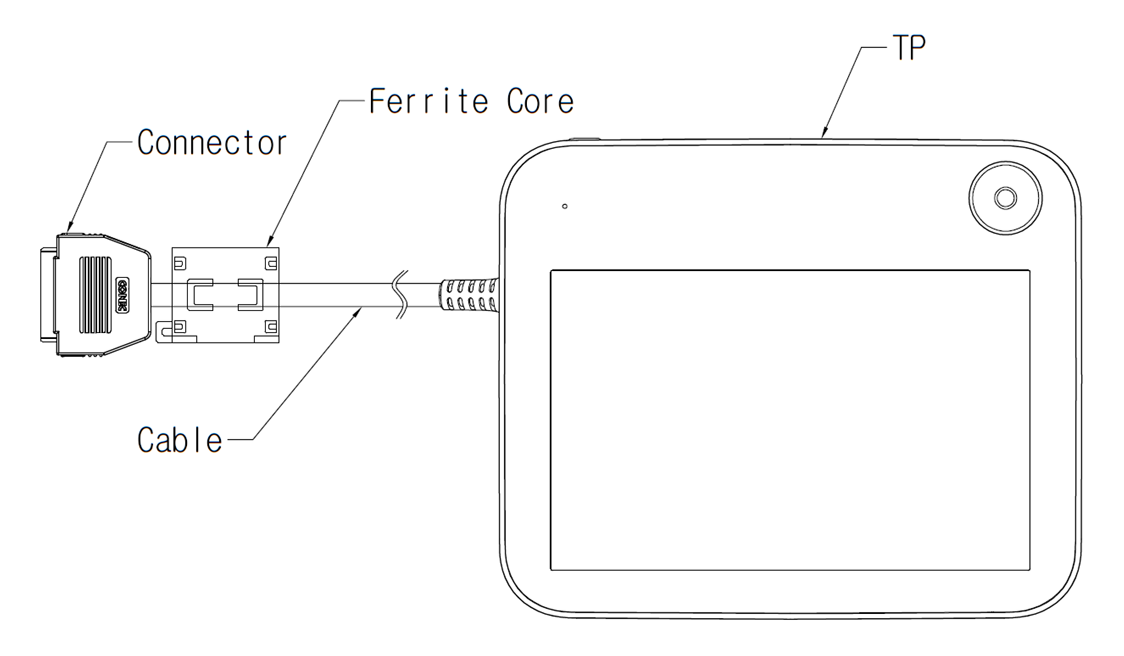
Umieszczanie kabla manipulatora i kabla manipulatora
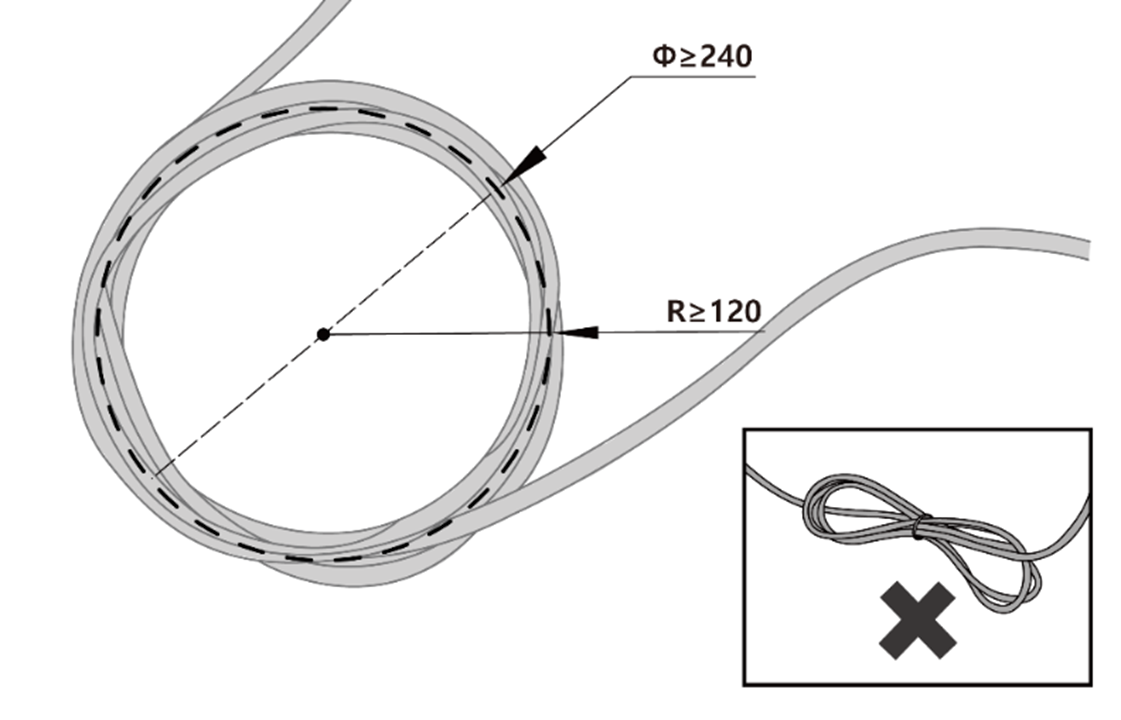
Upewnij się, że promień krzywizny manipulatora i kabla do nauki manipulatora jest większy niż minimalny promień krzywizny (120 mm).
Uwaga
Upewnij się, że promień krzywizny między kablem manipulatora a złączem manipulatora uczenia jest większy niż minimalny promień krzywizny (120 mm).
Jeśli promień krzywizny jest mniejszy niż minimalny promień krzywizny (120 mm), może dojść do odłączenia kabla lub uszkodzenia produktu.
W środowiskach, w których może wystąpić hałas elektromagnetyczny, należy odpowiednio zainstalować kabel, aby zapobiec nieprawidłowym działaniom.
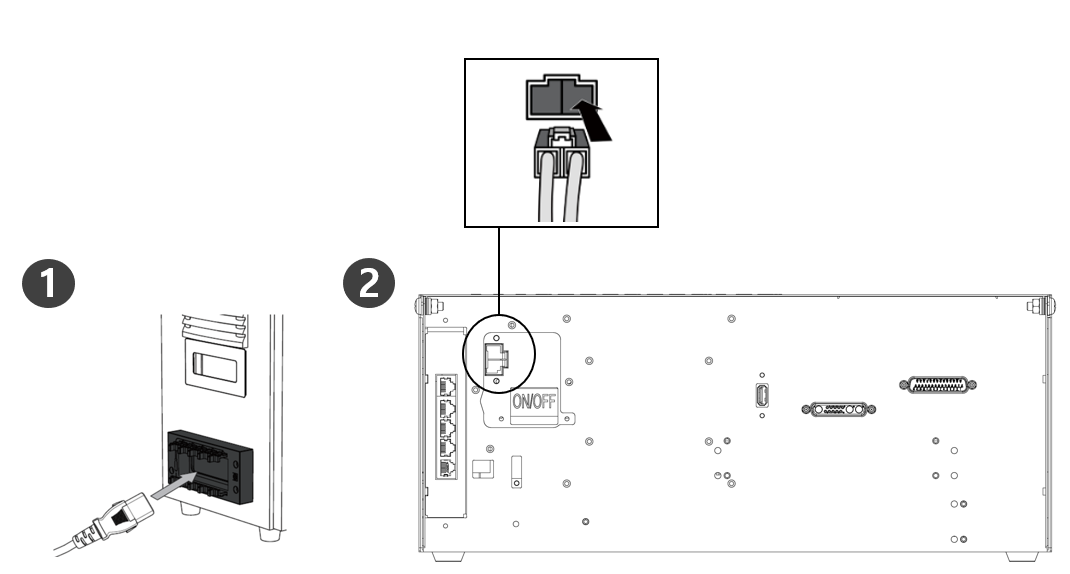
Podłączanie zasilania do sterownika
Podłącz kabel zasilający do odpowiednich złączy kontrolera, aż do kliknięcia i upewnij się, że kabel jest mocno podłączony.
Ostrzeżenie
Po podłączeniu kabli zasilania (połączenia uziemienia elektrycznego) należy upewnić się, że robot jest prawidłowo uziemiony. Ustalić wspólną masę dla wszystkich urządzeń w układzie, używając nieużywanych śrub związanych z symbolem masy wewnątrz sterownika. Przewód uziemiający musi spełniać maksymalną znamionową moc znamionową systemu.
Zabezpieczyć moc wejściową sterownika za pomocą takich urządzeń, jak wyłącznik automatyczny.
Nie wolno modyfikować ani przedłużać kabla robota. Może to spowodować pożar lub awarię kontrolera.
Przed dostarczeniem zasilania do sterownika należy upewnić się, że wszystkie kable są prawidłowo podłączone. Zawsze używaj oryginalnego kabla dołączonego do opakowania produktu.
Uważać, aby nie podłączyć nieprawidłowo biegunowości napięcia wejściowego.
Uwaga
Podczas konfigurowania systemu zaleca się zainstalowanie przełącznika zasilania umożliwiającego jednoczesne wyłączenie wszystkich urządzeń.
W przypadku korzystania ze sterownika DC ruch robota może być ograniczony w zależności od obciążenia i ruchu.
Jeśli napięcie wejściowe jest mniejsze niż 48V, ruch robota może być ograniczony w zależności od obciążenia i ruchu.
Zasilacz musi spełniać minimalne wymagania, takie jak wyłączniki uziemiające i automatyczne. Parametry elektryczne są następujące:
Parametr | Dane techniczne |
Napięcie wejściowe | 22 – 60 VDC |
Znamionowy prąd wejściowy | 30 A. |