
Wypróbuj próbki poleceń zgodności
Uwaga
Przed przystąpieniem do próbkowania próbki należy przeczytać i przestrzegać środkówostrożności . Więcej informacji można znaleźć W CZĘŚCI pierwszej. Instrukcja bezpieczeństwa.
Uwaga
Jeśli zewnętrzny moment obrotowy przekracza wartość progową podczas włączania lub wyłączania kontroli zgodności, robot zatrzymuje program z powodu błędu JTS (Joint Torque Sensor).
Zmiana sztywności może być przeprowadzona niezależnie od zewnętrznego momentu obrotowego.
Podczas kontroli zgodności nie można wykonać wspólnych ruchów, takich jak polecenie MoveJ.
Próg błędu JTS (Nm) | ||||||
Model | J1 | J2 | J3 | J4 | J5 | J6 |
|---|---|---|---|---|---|---|
M1013 | 25 | 25 | 25 | 15 | 15 | 15 |
M0617 | 30 | 30 | 30 | 15 | 15 | 15 |
M0609 | 18 | 18 | 15 | 15 | 15 | 15 |
M1509 | 18 | 18 | 15 | 15 | 15 | 15 |
H2515 | 40 | 50 | 40 | 15 | 15 | 15 |
H2017 | 40 | 50 | 40 | 15 | 15 | 15 |

Zmienić stan serwomechanizmu na WŁĄCZONY.
Zmień tryb pracy na Ręczny.
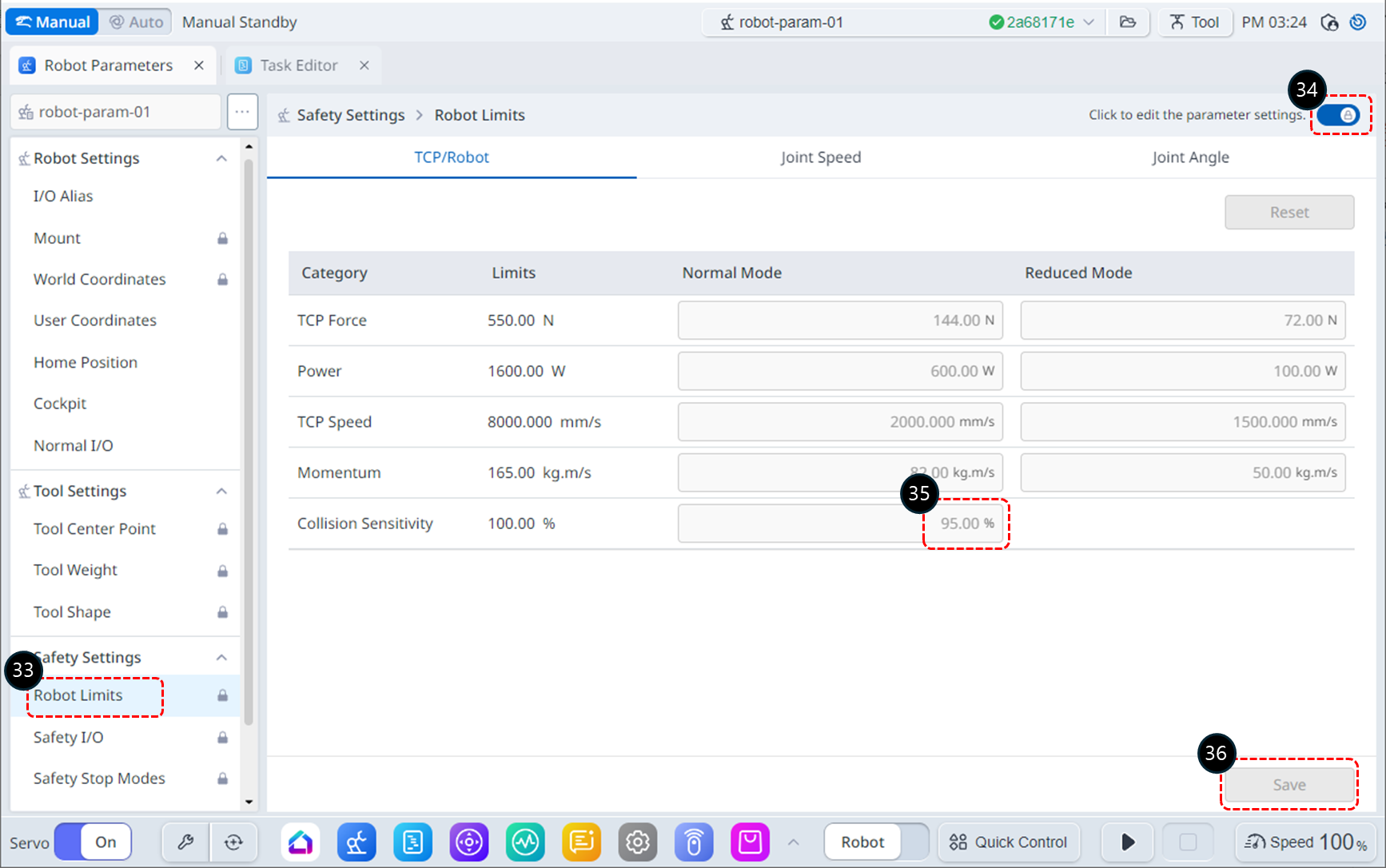
Z dolnego menu wybierz moduł Parametry robota. W tym przykładzie czułość kolizji jest ustawiona na 95%, aby wyjaśnić przyczynę obniżenia czułości kolizji podczas korzystania z kontroli zgodności.
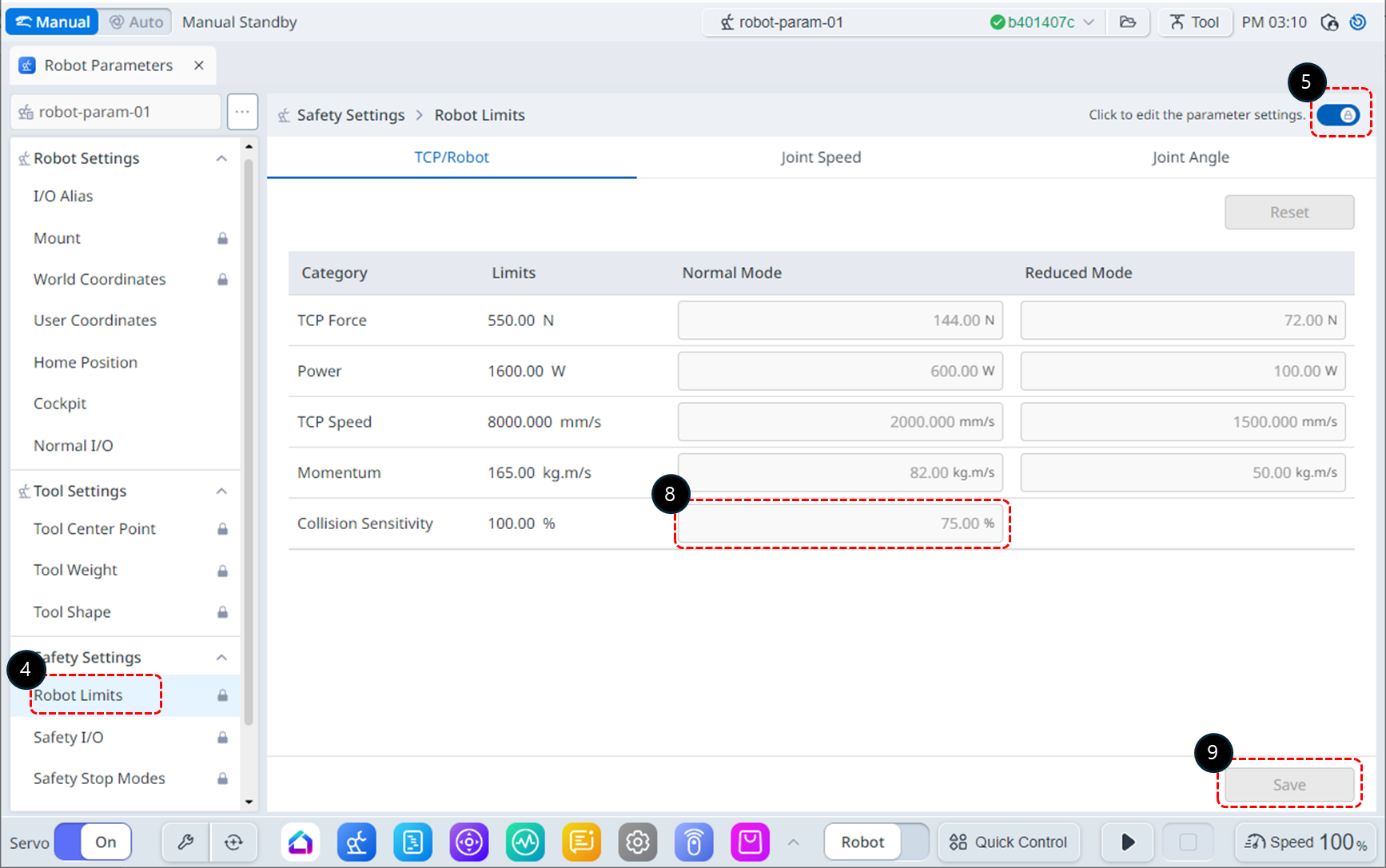
Wybierz opcję Limity robota w menu Ustawienia bezpieczeństwa.
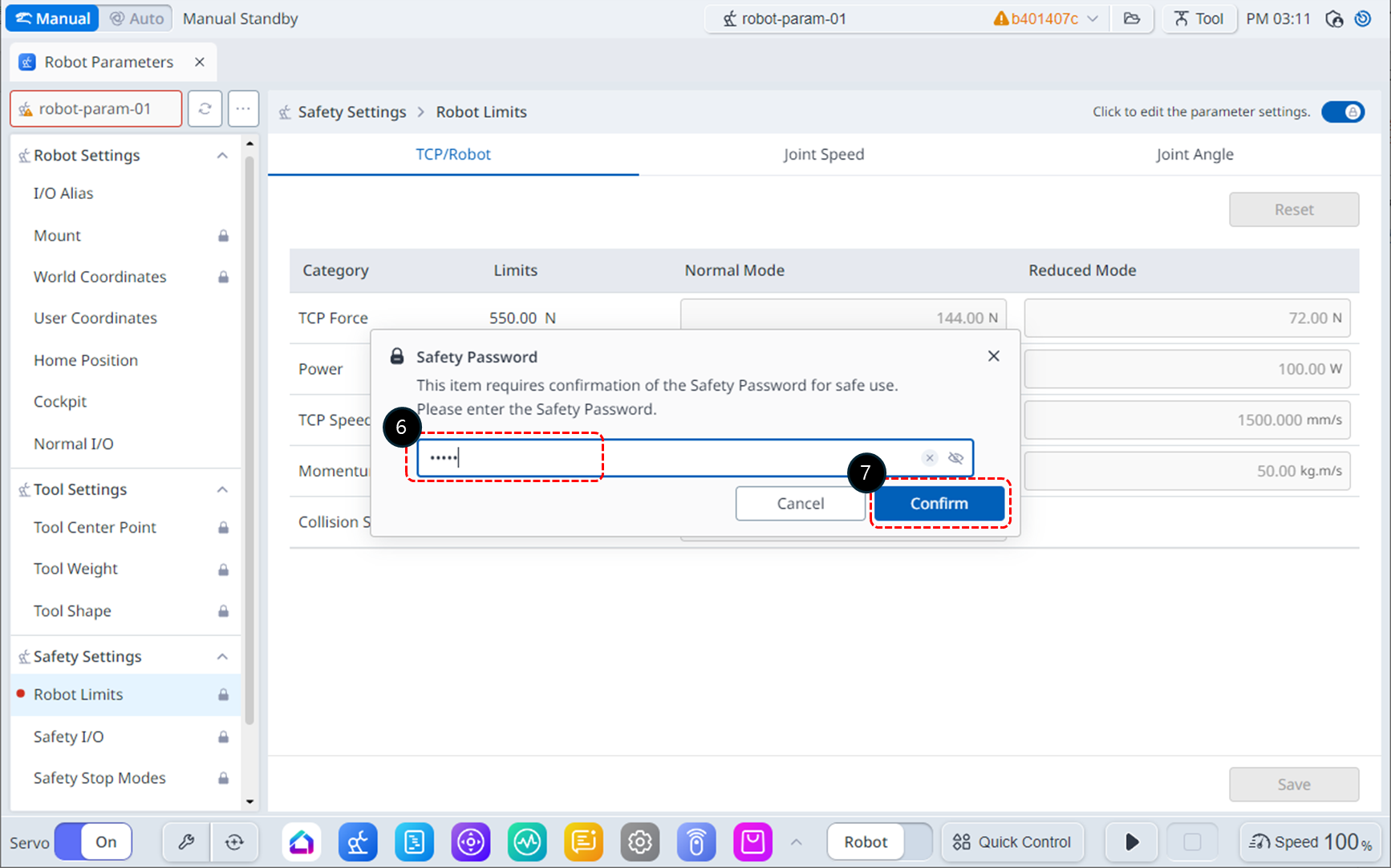
Włącz stan edycji parametrów.
Jeśli pojawi się okno wprowadzania hasła, wprowadź hasło bezpieczeństwa (domyślne hasło bezpieczeństwa: Admin).
Kliknij przycisk Potwierdź.
Zmień czułość kolizji na 95%.
Kliknij przycisk Zapisz, aby zapisać ustawienia.
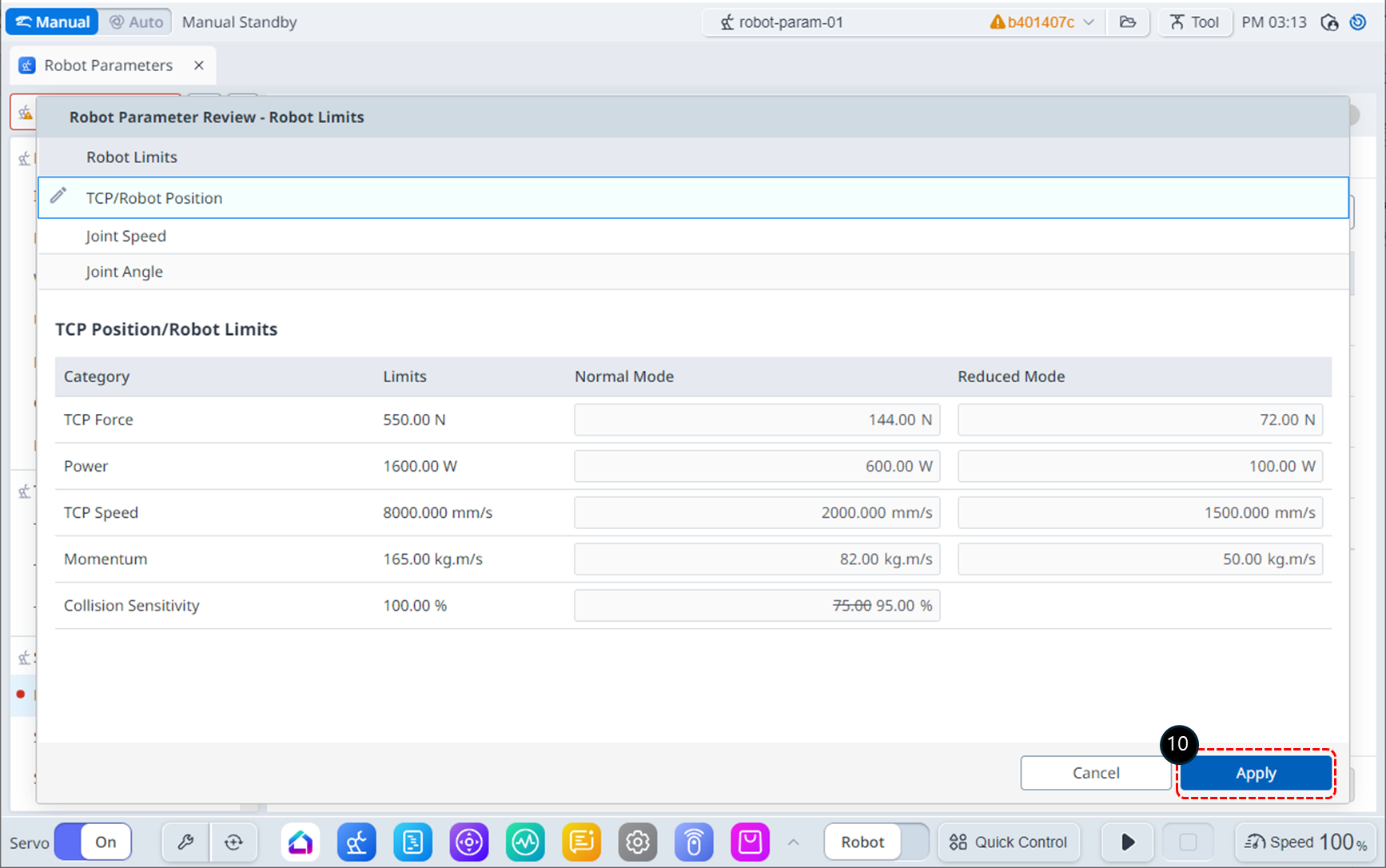
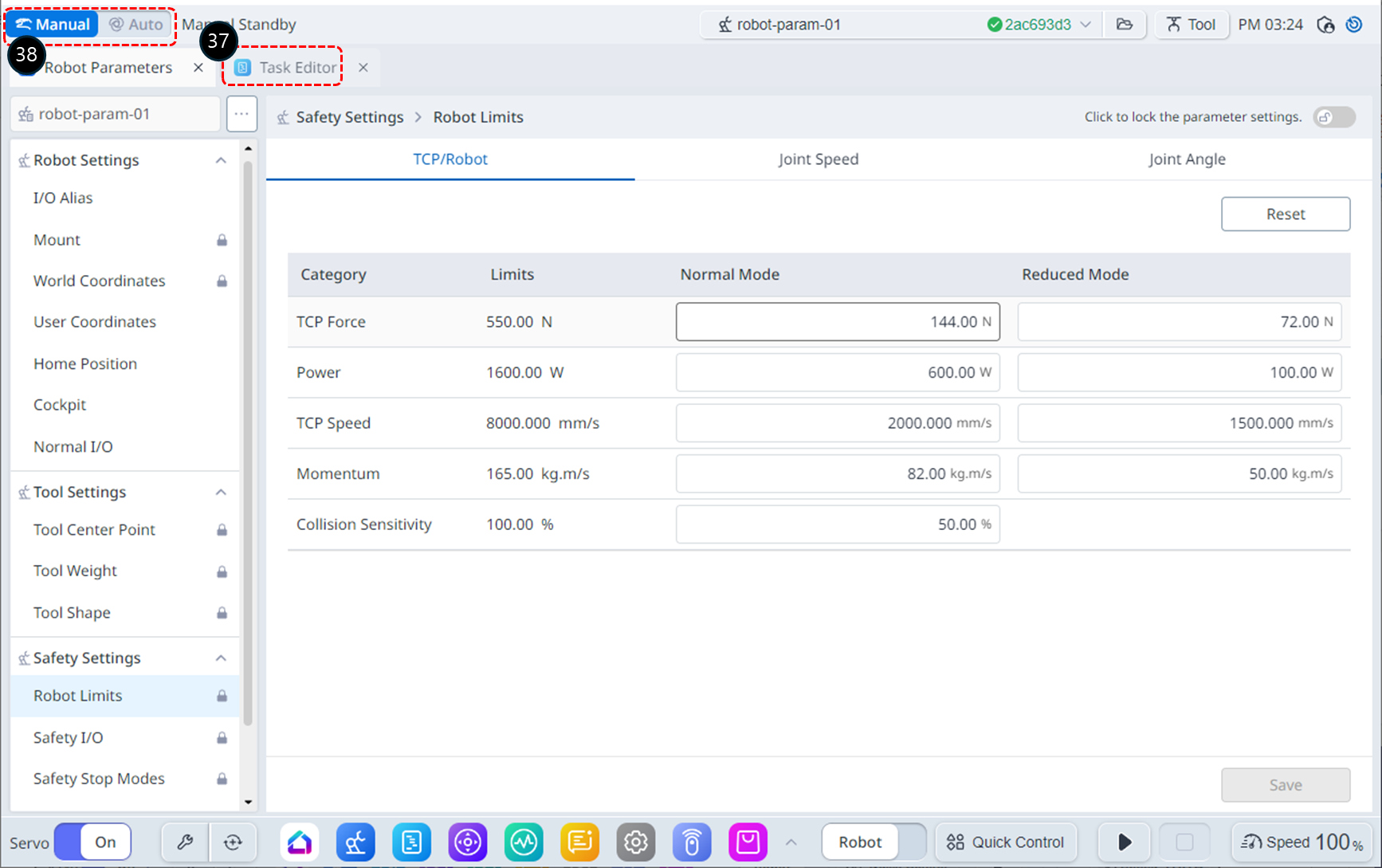
Po przejrzeniu zmian kliknij przycisk Zastosuj.
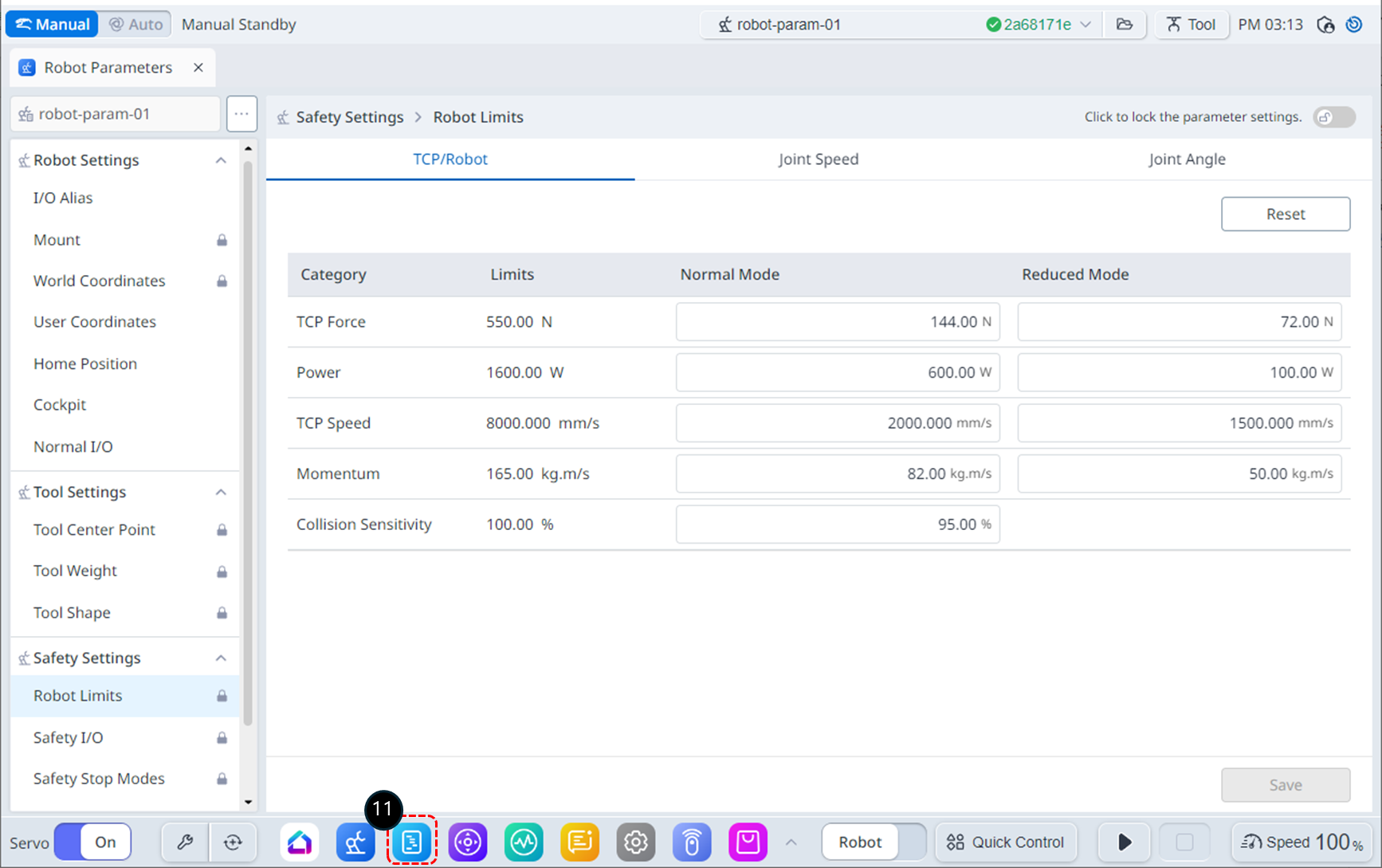
Z dolnego menu wybierz moduł Edytor zadań.

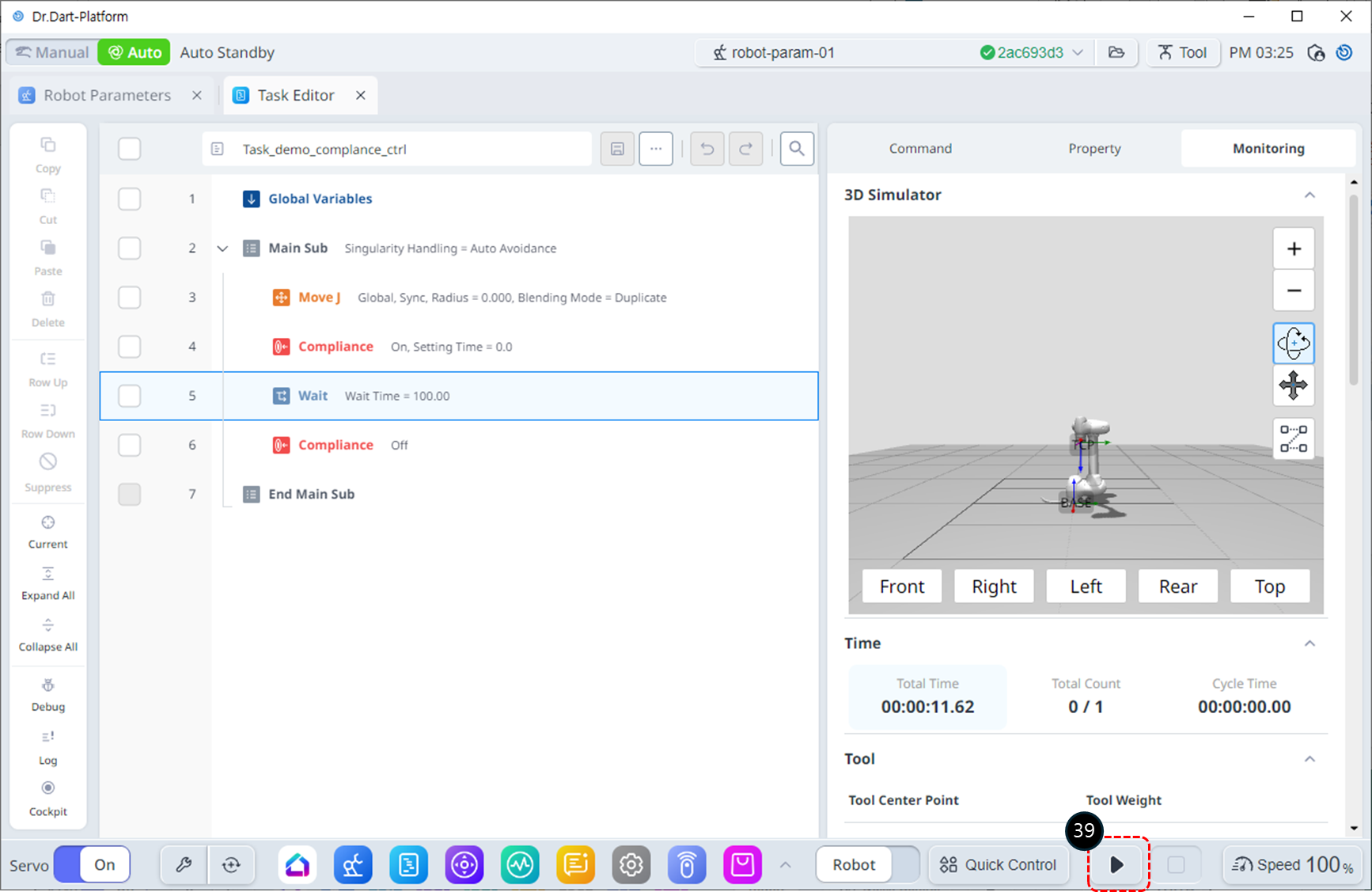
Zmień nazwę zadania na Task_demo_compliance_ctrl.
Zapisz zaktualizowaną nazwę zadania.
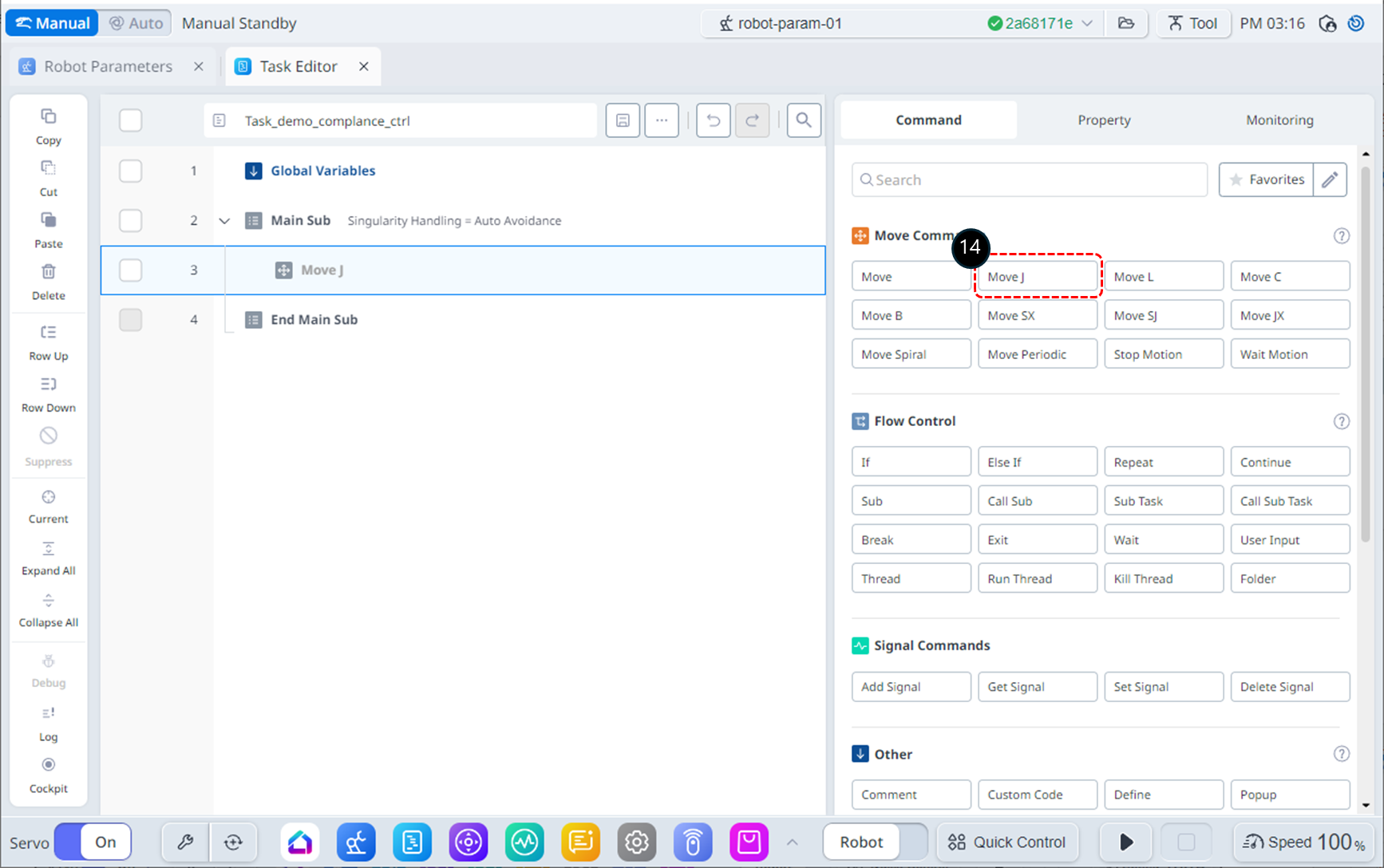
Dodaj polecenie MoveJ. To polecenie zostanie użyte do przesunięcia robota do pozycji wyjściowej w celu kontroli zgodności.

Dodaj dwa polecenia zgodności. Polecenia te będą używane do aktywacji i dezaktywacji kontroli zgodności.
Wstawić polecenie Wait między poleceniami Compliance. To polecenie wait zostanie użyte do utrzymania kontroli zgodności.
Wybrać polecenie MoveJ w linii 3.
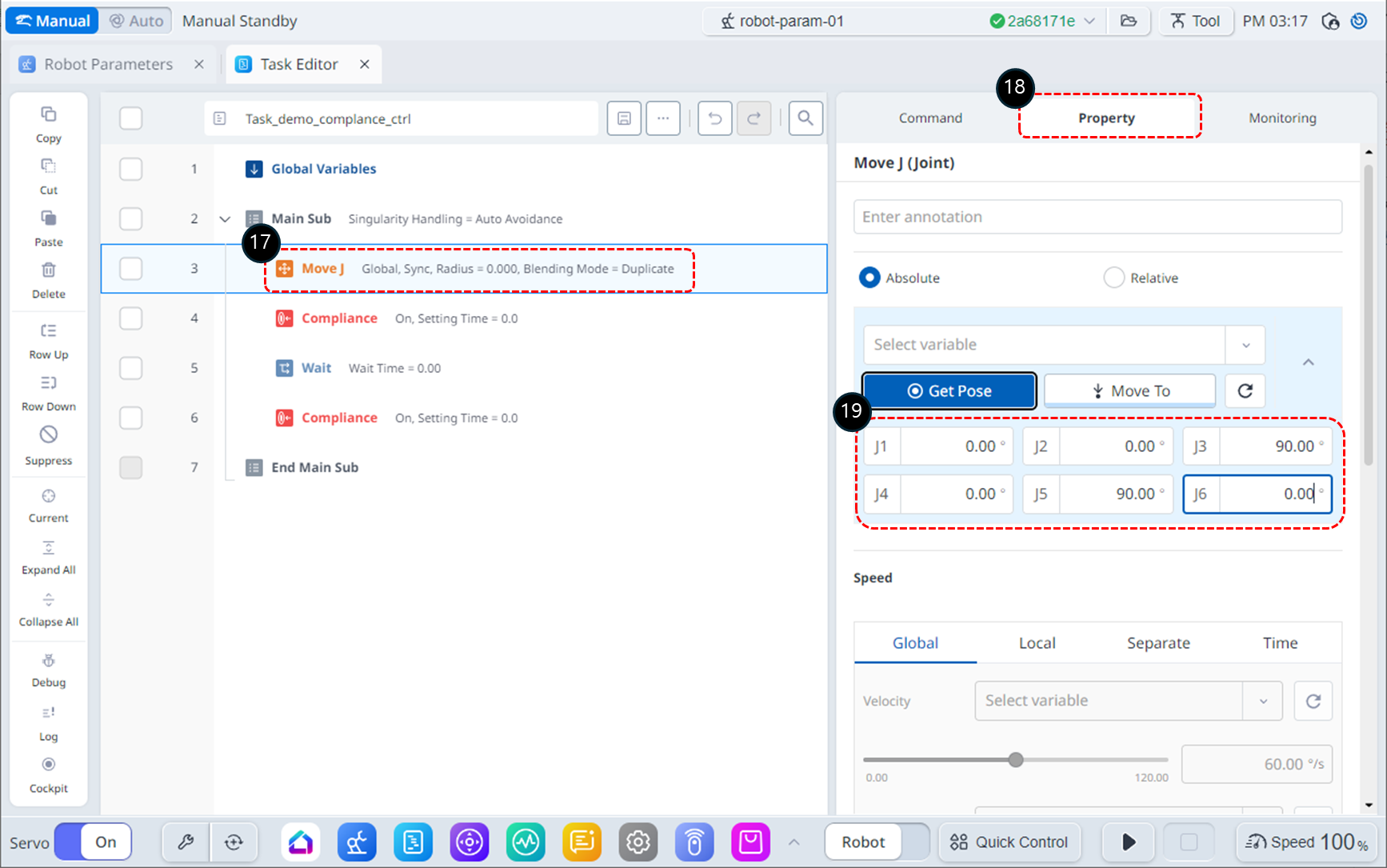
Wybierz kartę Własność.
Zmienić położenie docelowe MoveJ na (, 90, 90, c) stopni. W zależności od miejsca instalacji robota, kąt J1 może być regulowany w razie potrzeby.
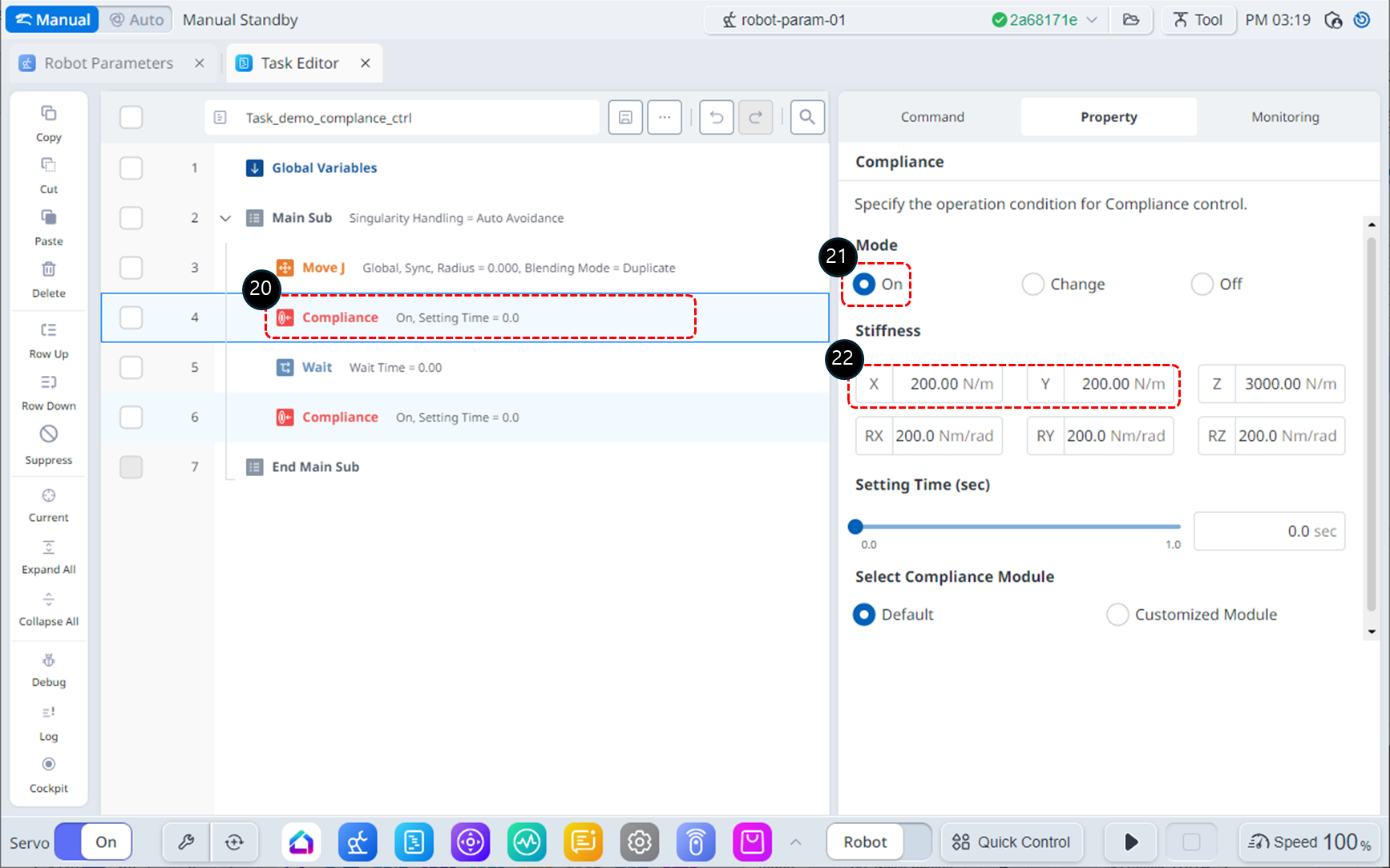
Wybierz polecenie Zgodność w wierszu 4.
Na karcie Właściwości ustawić Tryb w następujący sposób: Tryb on aktywuje kontrolę zgodności.
Tryb : Wł
Ustawić sztywność w następujący sposób: Zmniejsz sztywność w kierunkach X i Y, aby robot reagował łagodniej w tych kierunkach.
X : 200 N/m.
Y : 200 N/m.
Z : 3000 N/m (domyślnie)
RX, Ry, Rz: 200 Nm/rad (domyślnie)
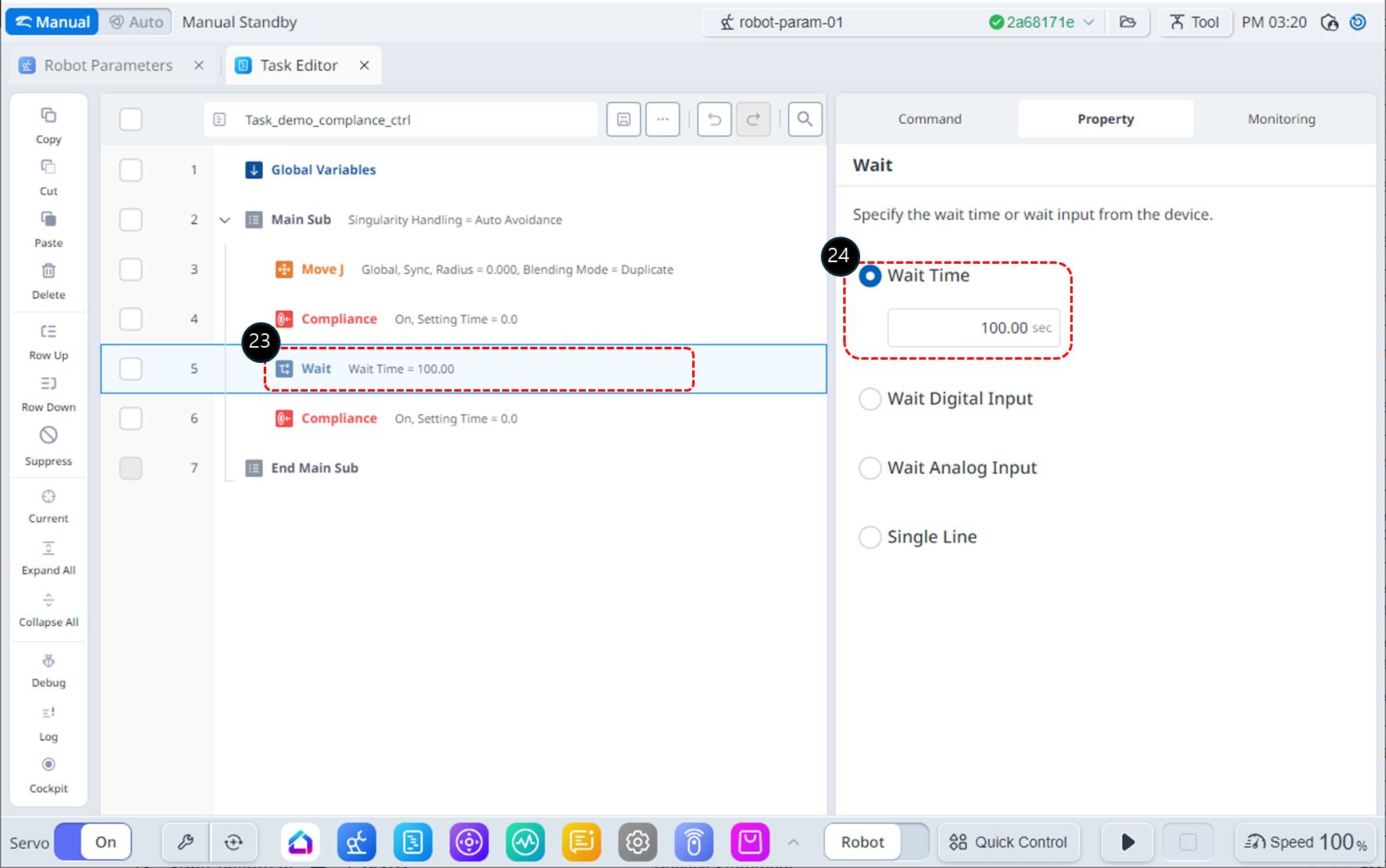
Wybierz polecenie Czekaj w linii 5.
Ustaw czas oczekiwania w następujący sposób.
Czas oczekiwania: 100 s.
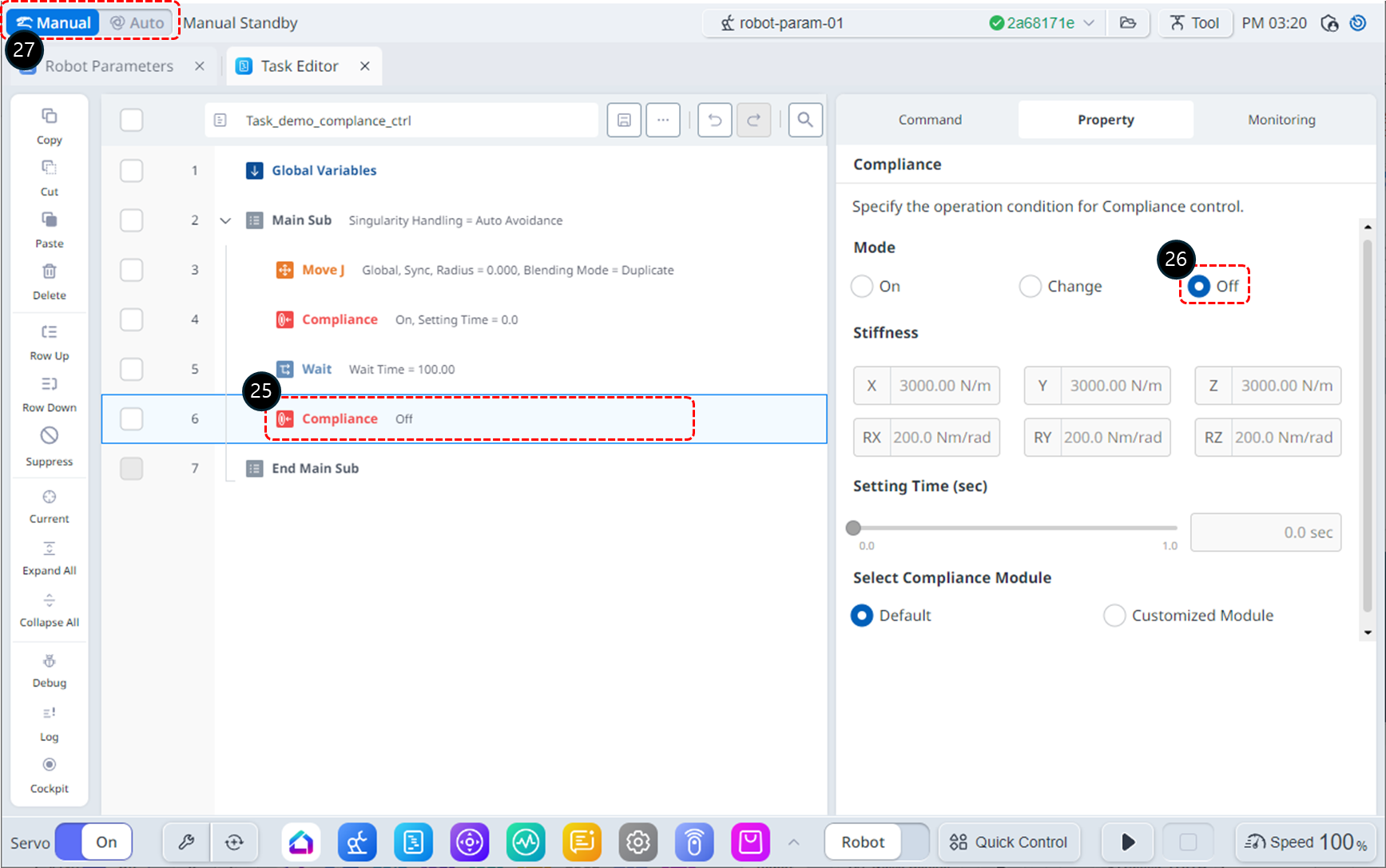
Wybierz polecenie Zgodność w wierszu 6.
Na karcie Właściwości ustawić Tryb w następujący sposób: Tryb Wył. Wyłącza kontrolę zgodności.
Tryb : Wył
Zmień tryb pracy na Auto. Karta Właściwości automatycznie przełączy się na kartę Monitorowanie.
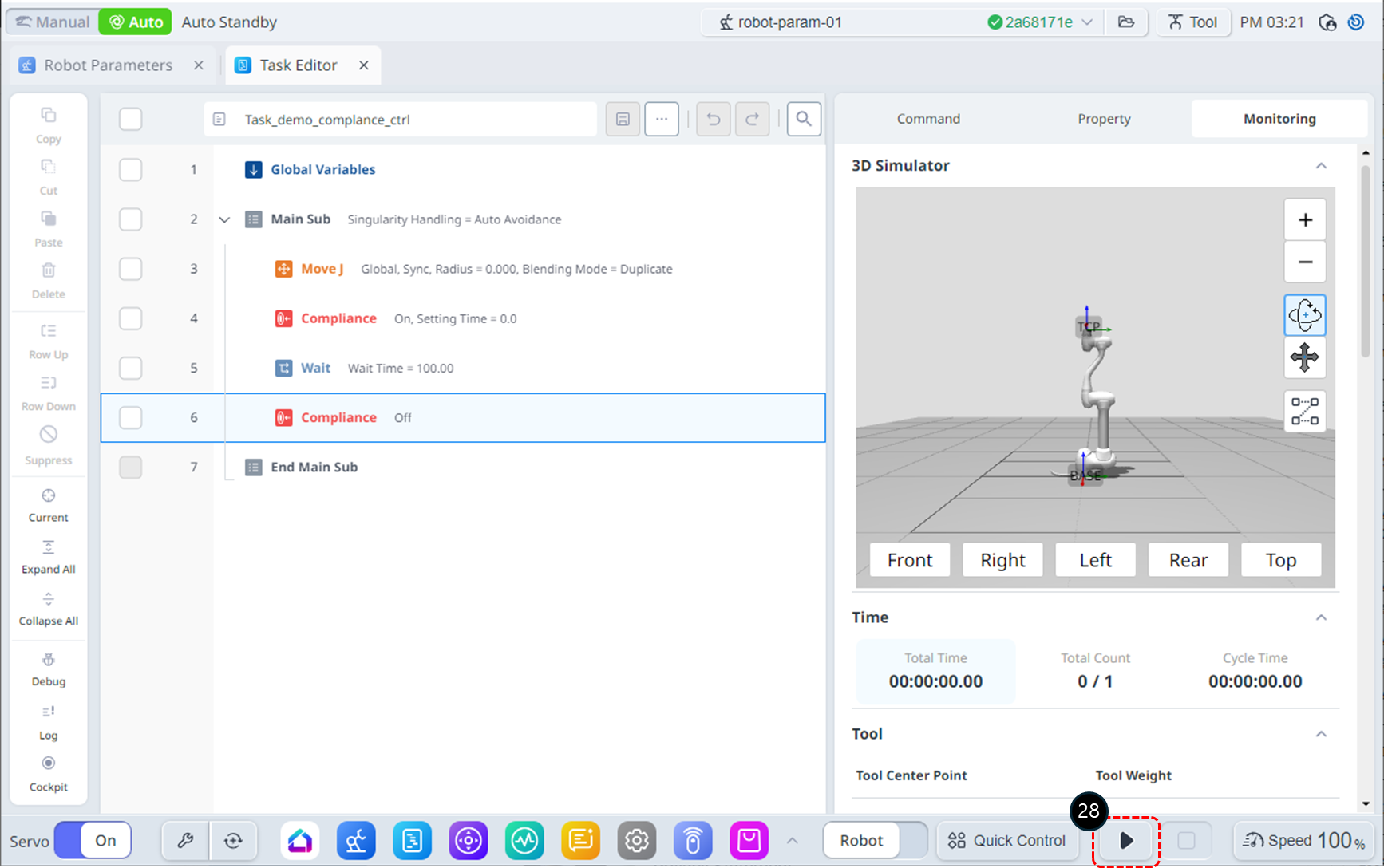
Kliknij przycisk Uruchom. Robot przesunie się do pozycji wyjściowej, zainicjuje kontrolę zgodności i pozostanie nieruchomy przez 100 sekund. W tym czasie delikatnie popchnij efektor końcowy robota w kierunku ciała robota. Robot zatrzyma się z błędem kolizyjnym (lub błędem TCP Force Limit). W stanie zatrzymania awaryjnego spowodowanym zderzeniem dioda LED robota wyświetli żółty kolor.

Kliknij przycisk Reset w oknie ostrzeżenia o zatrzymaniu bezpieczeństwa. Program zadania wznowi działanie.
Kliknij przycisk Stop, aby zakończyć program.
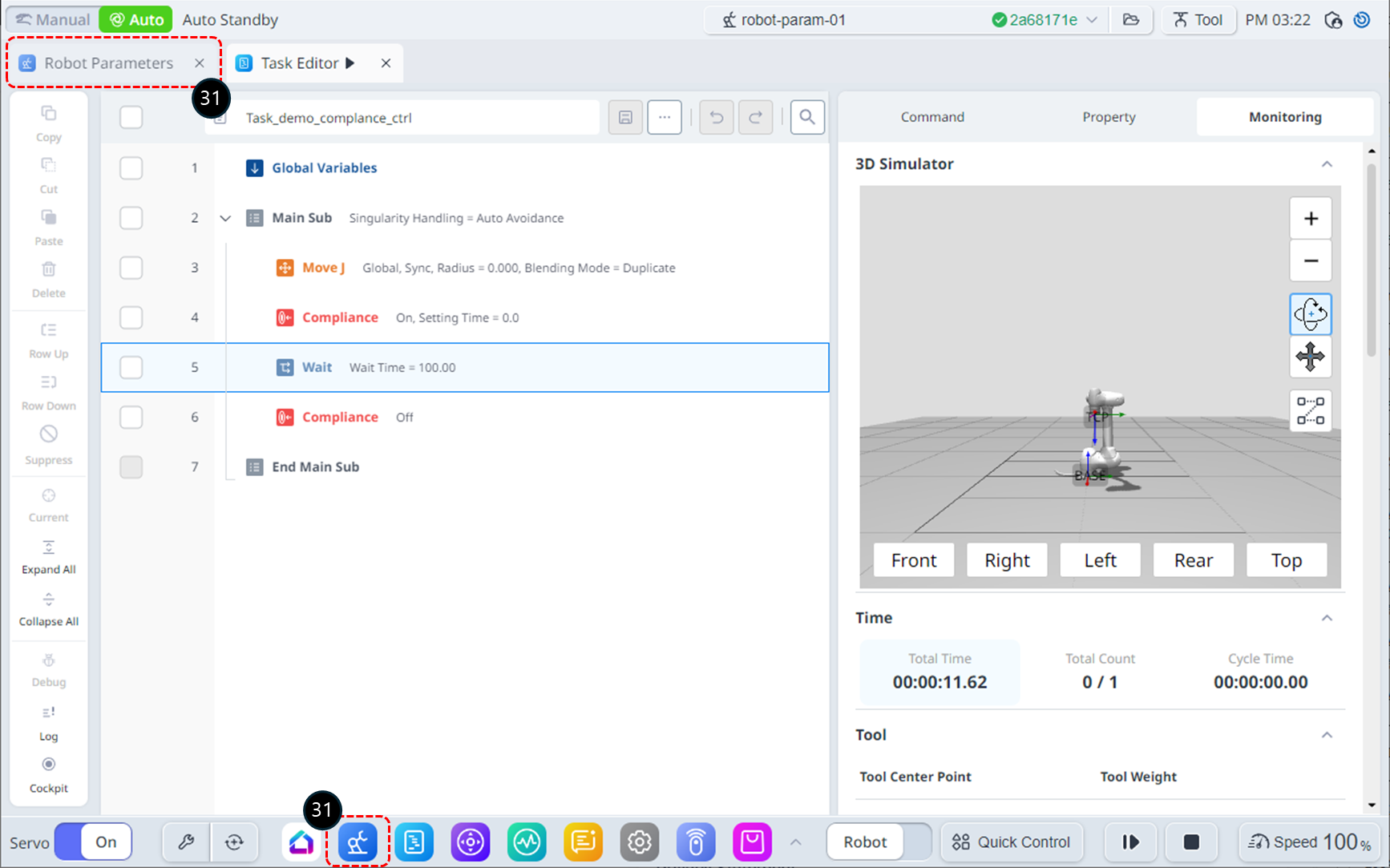
Aby rozwiązać problemy z kolizją, należy obniżyć czułość kolizji w ustawieniach bezpieczeństwa. (Jeśli występuje problem z limitem siły TCP, parametr siły TCP powinien zostać zwiększony.) Z dolnego menu wybierz moduł Parametry robota. Alternatywnie można wybrać kartę Moduł parametrów robota w lewym górnym rogu, która działa tak samo.
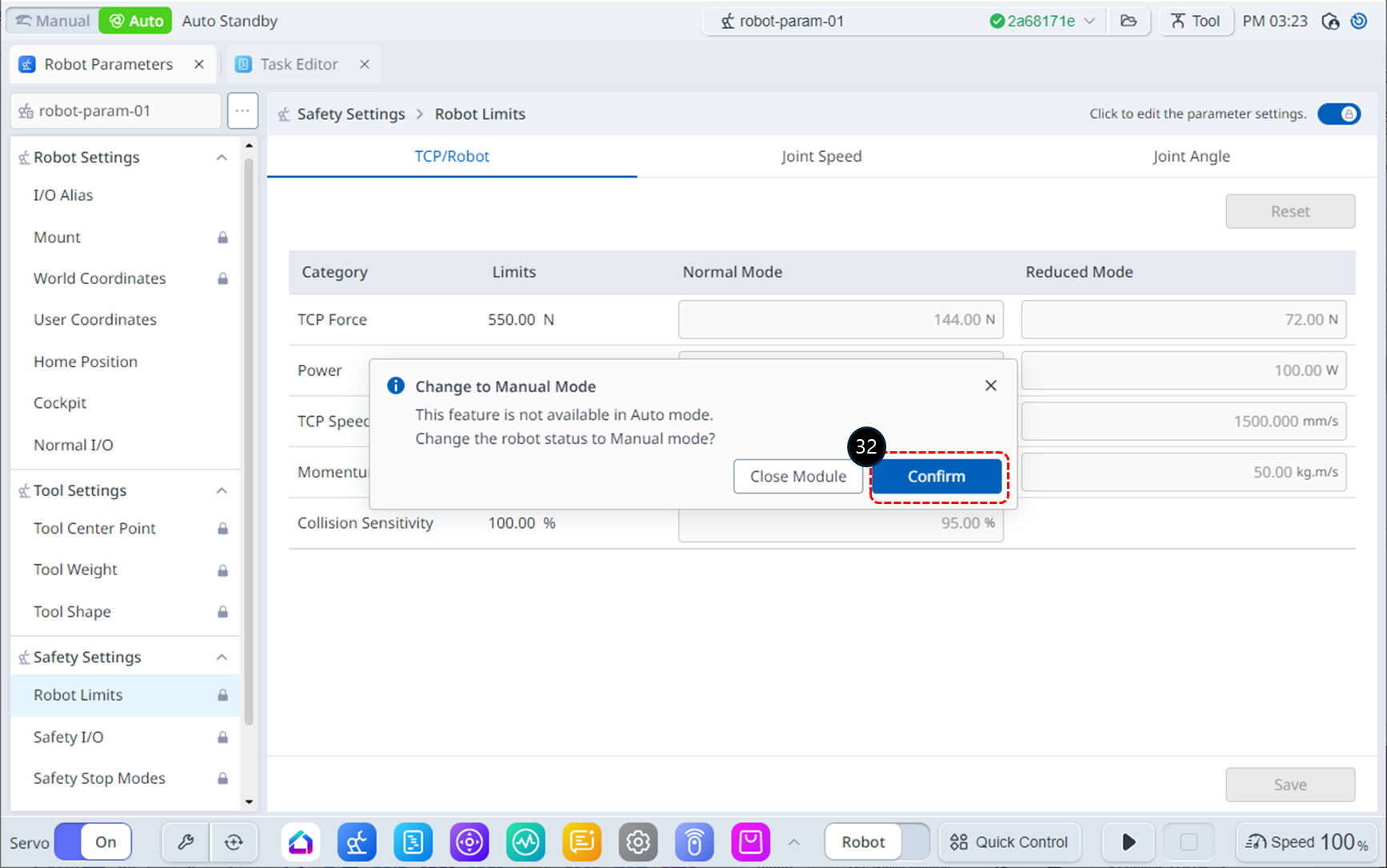
W trybie automatycznym dostęp do modułu parametrów robota spowoduje wyświetlenie okna powiadomień. Kliknij przycisk Potwierdź, aby przejść do trybu ręcznego.
Wybierz opcję Limity robota w menu Ustawienia bezpieczeństwa.
Włącz stan edycji parametrów. Jeśli pojawi się okno wprowadzania hasła, patrz kroki 6–7.
Zmień czułość kolizji na 50%.
Kliknij przycisk Zapisz, aby zapisać ustawienia. Jeśli pojawi się okno Przegląd parametrów robota, przejrzyj modyfikacje i kliknij przycisk Zastosuj.
Wybierz kartę Moduł Edytora zadań.
Aby uruchomić program zadań, należy przełączyć w tryb automatyczny.
Kliknij przycisk Uruchom. W czasie oczekiwania delikatnie popchnij efektor końcowy robota w kierunku korpusu robota. Robot przesunie się z powodu siły pchającej, a po zwolnieniu ręki powróci do pierwotnej pozycji.