
Podłączanie systemu
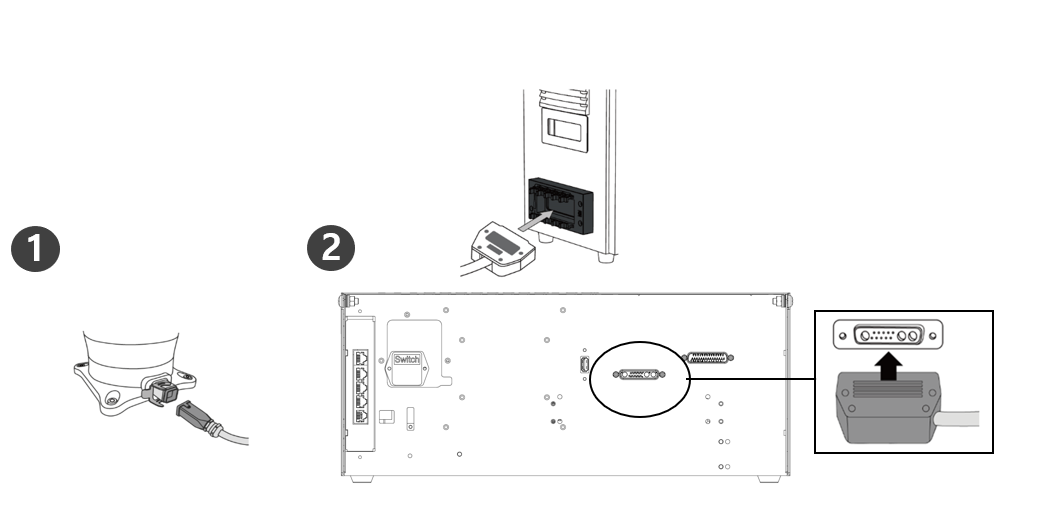
Podłączanie manipulatora do sterownika
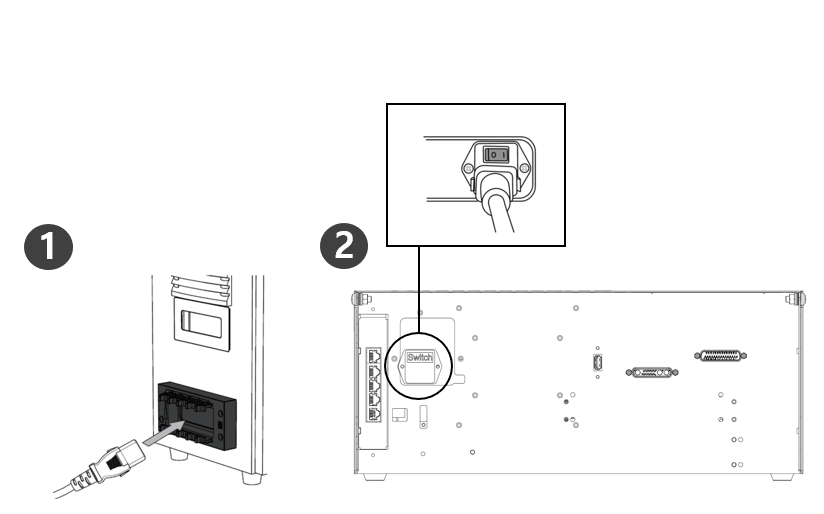
Opis | |
|---|---|
| 1 | Podłączyć kabel manipulatora do sterownika i założyć pierścień zabezpieczający
|
| 2 | Podłączanie przeciwległego końca kabla połączeniowego manipulatora do sterownika
|
Uwaga
Nie odłączaj kabla manipulatora, gdy robot jest włączony. Może to spowodować nieprawidłowe działanie robota.
Nie wolno dokonywać żadnych modyfikacji ani przedłużeń kabla manipulatora.
Montując sterownik na podłodze, zabezpieczyć co najmniej 50 mm prześwitu z każdej strony, aby zapewnić odpowiednią wentylację.
Przed włączeniem sterownika należy upewnić się, że złącza są prawidłowo zablokowane.
Uwaga
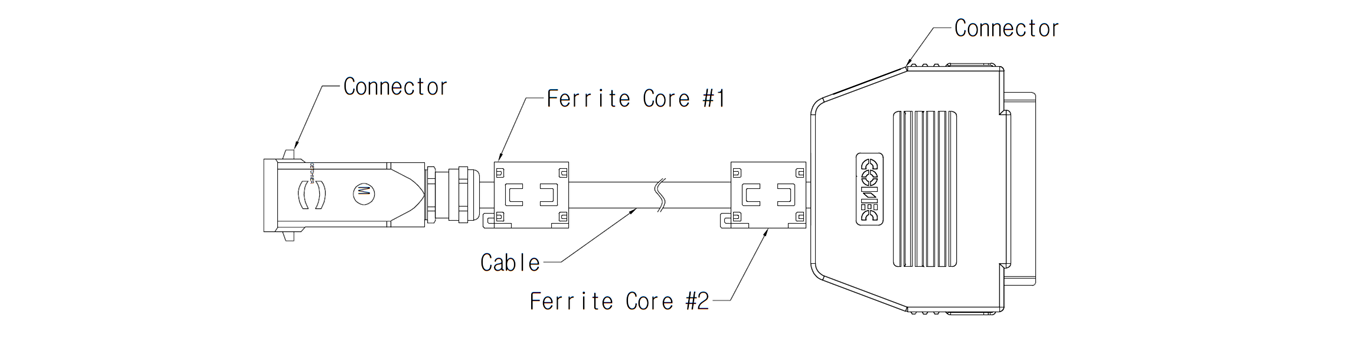
Podczas konfigurowania systemu zaleca się zainstalowanie reduktora szumów, aby zapobiec zakłóceniom i zakłóceniom działania systemu.
Jeśli na sterownik wpływa hałas generowany przez fale elektromagnetyczne, zaleca się zainstalowanie rdzeni ferrytowych na obu końcach kabla manipulatora w celu zapewnienia normalnego działania. Miejsca instalacji są następujące:
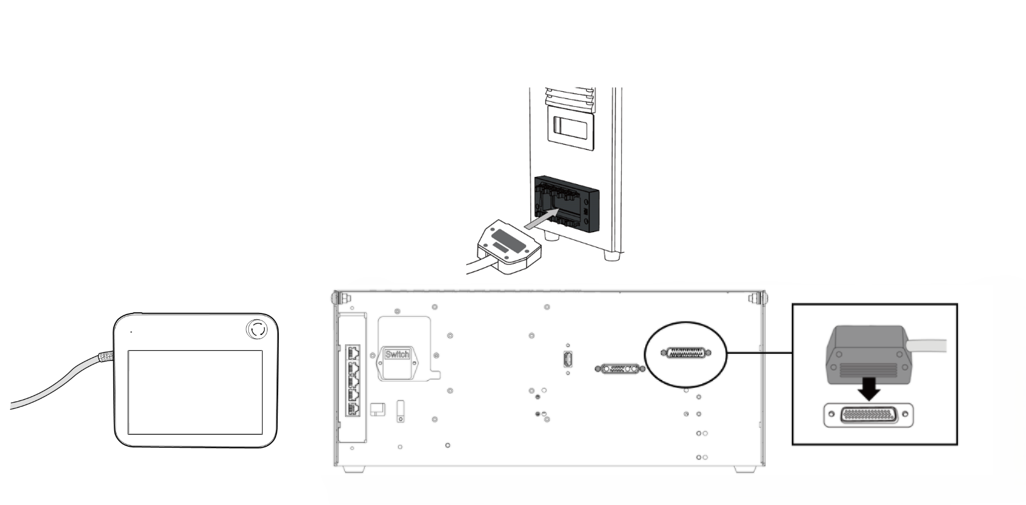
Podłącz kontroler, aby zaprogramować manipulator
Podłącz kabel manipulatora TEACH do odpowiednich złączy kontrolera, aż do kliknięcia i upewnij się, że kabel jest mocno podłączony.
Uwaga
Podczas podłączania kabla przed podłączeniem sprawdzić kształt połączenia, aby sworzeń nie zginał się.
Podczas korzystania z manipulatora nauczania wiszącego na ścianie lub kontrolerze należy uważać, aby nie potknąć się o kable łączące.
Należy uważać, aby nie dopuścić do kontaktu sterownika, manipulatora lub kabla z wodą.
Nie należy instalować kontrolera ani programować manipulatora w warunkach dużego zapylenia lub mokrego otoczenia.
Kontroler i manipulator nie mogą być narażone na działanie zapylonego środowiska, które przekracza wartość IP20. Należy zachować szczególną ostrożność w środowiskach z przewodzącym kurzem.
Uwaga
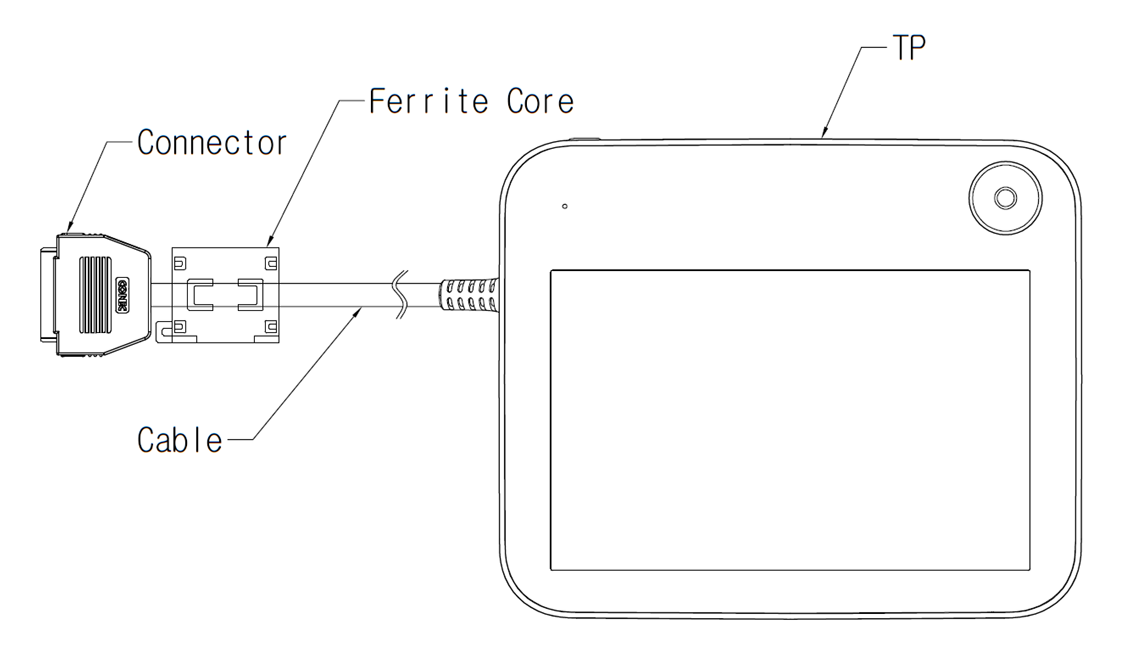
Podczas konfigurowania systemu zaleca się zainstalowanie reduktora szumów, aby zapobiec zakłóceniom i zakłóceniom działania systemu.
W przypadku wpływu szumów generowanych przez fale elektromagnetyczne, zaleca się zainstalowanie rdzeni ferrytowych na częściach połączeniowych kabla sterownika Teach Pendant w celu zapewnienia normalnego działania. Miejsca instalacji są następujące:
Podłączanie zasilania do sterownika
Aby dostarczyć zasilanie do kontrolera, podłącz kabel zasilania kontrolera do standardowego gniazda zasilania IEC.
Podczas podłączania należy używać kabla ze standardową wtyczką zasilającą, która odpowiada gniazdu w kraju użytkowania.
Wcisnąć całkowicie wtyczkę do odpowiedniego złącza sterownika, aby zapobiec poluzowaniu się kabla. Podłącz standardową wtyczkę IEC C14 pod sterownikiem do odpowiedniego przewodu IEC C13.
Uwaga
Po podłączeniu kabli zasilania (połączenia uziemienia elektrycznego) należy upewnić się, że robot jest prawidłowo uziemiony. Ustalić wspólną masę dla wszystkich urządzeń w układzie, używając nieużywanych śrub związanych z symbolem masy wewnątrz sterownika. Przewód uziemiający musi spełniać maksymalną znamionową moc znamionową systemu.
Zabezpieczyć moc wejściową sterownika za pomocą wyłącznika automatycznego.
Nie wolno dokonywać żadnych modyfikacji ani przedłużeń kabla zasilającego. Może to spowodować pożar lub awarię kontrolera.
Przed dostarczeniem zasilania do sterownika należy upewnić się, że wszystkie kable są prawidłowo podłączone. Zawsze używaj oryginalnego kabla dołączonego do opakowania produktu.
Uwaga
Podczas konfigurowania systemu zaleca się zainstalowanie przełącznika zasilania umożliwiającego jednoczesne wyłączenie wszystkich urządzeń.
Zasilacz musi spełniać minimalne wymagania, takie jak wyłączniki uziemiające i automatyczne. Parametry elektryczne są następujące: (W przypadku sterowników opcjonalnych, patrz odpowiedni dodatek).
Parametr | Dane techniczne |
|---|---|
Napięcie wejściowe | 100 – 240 VAC |
Bezpiecznik zasilania wejściowego (@100-240V) | 15 A. |
Częstotliwość wejściowa | 47 – 63 Hz |