
Dane techniczne robota
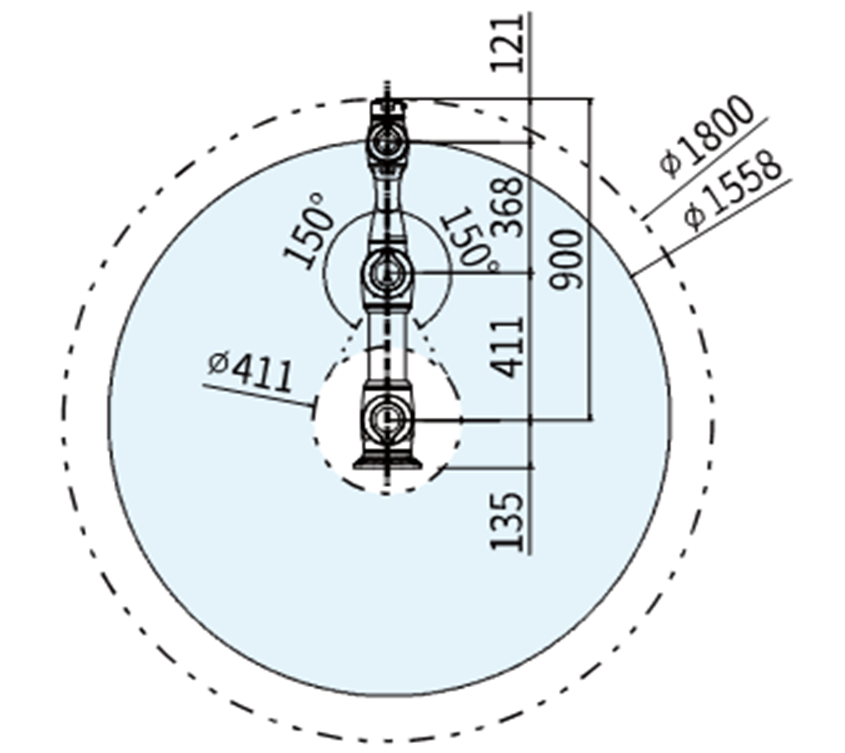
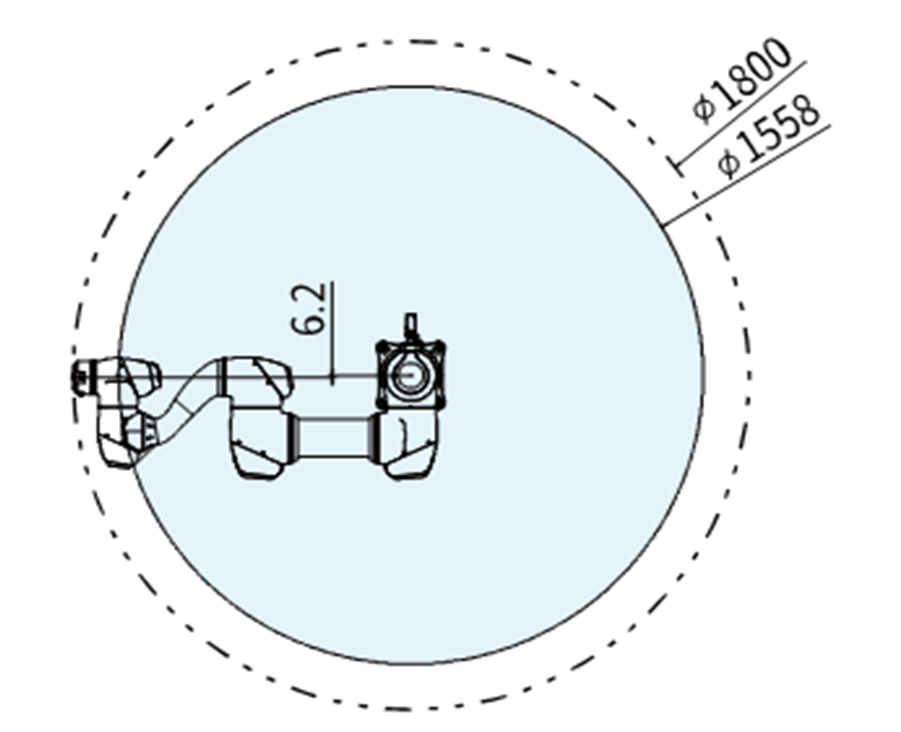
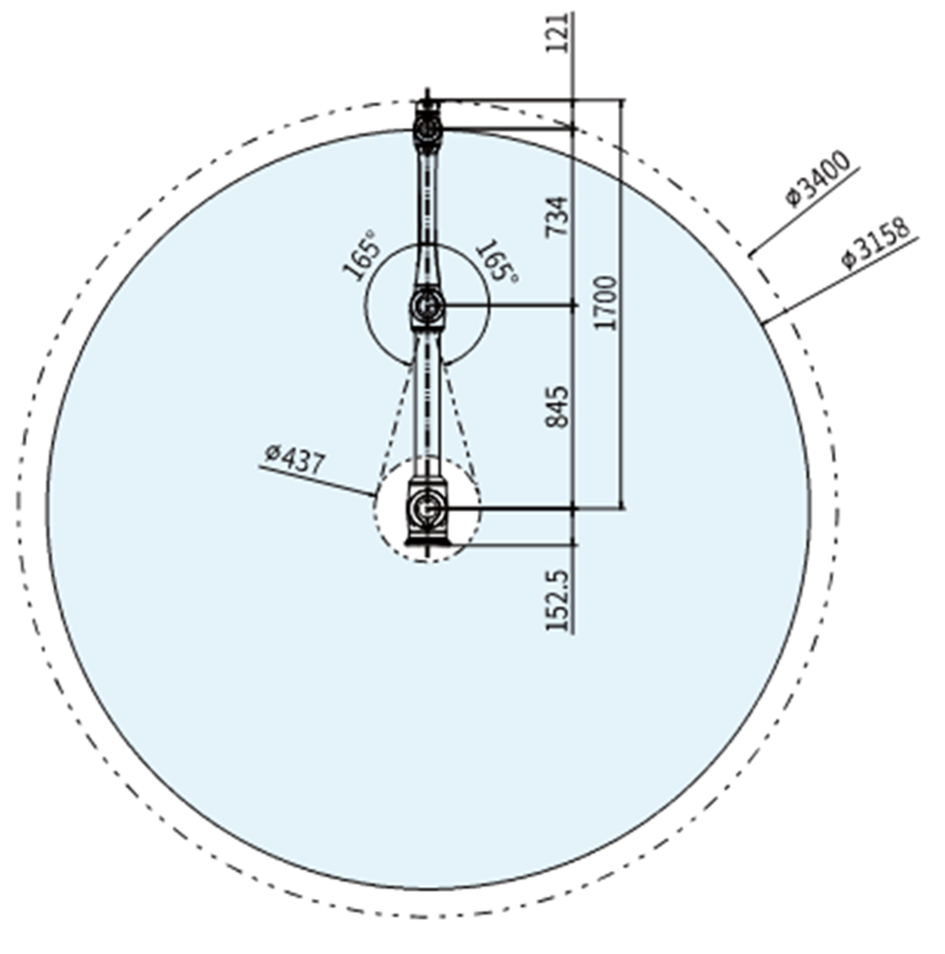
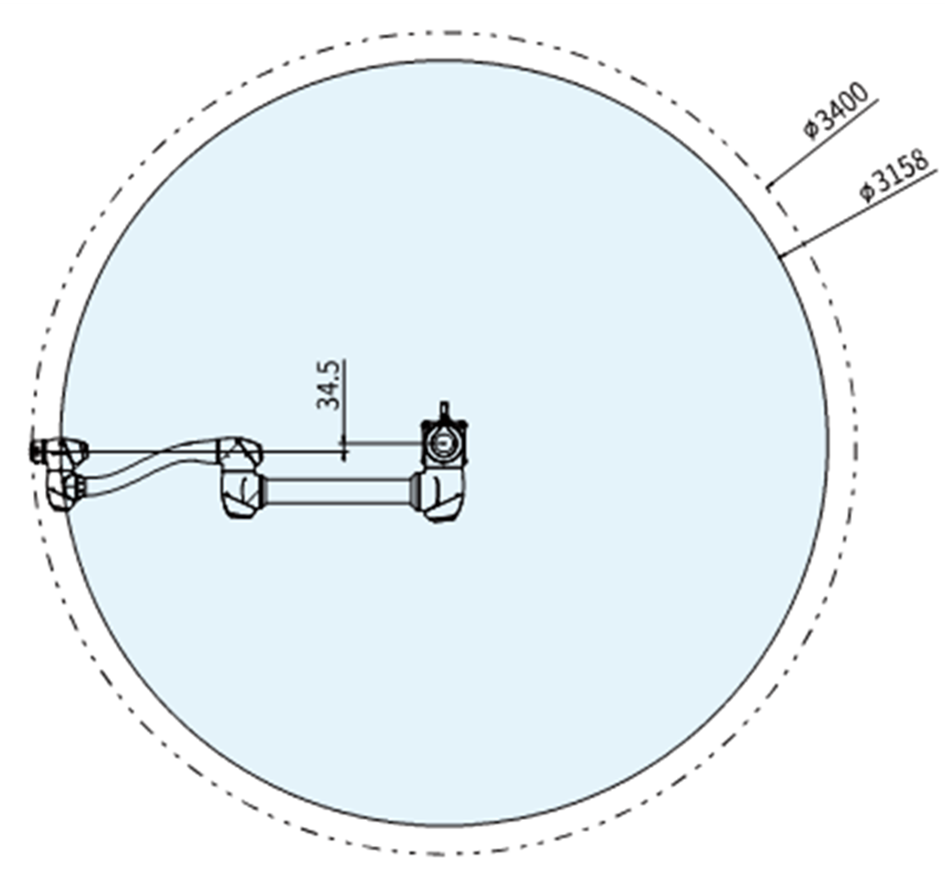
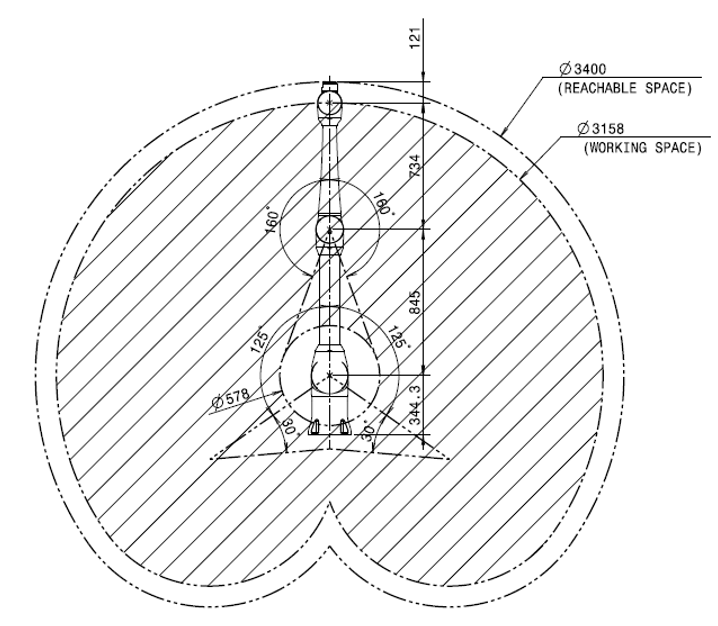
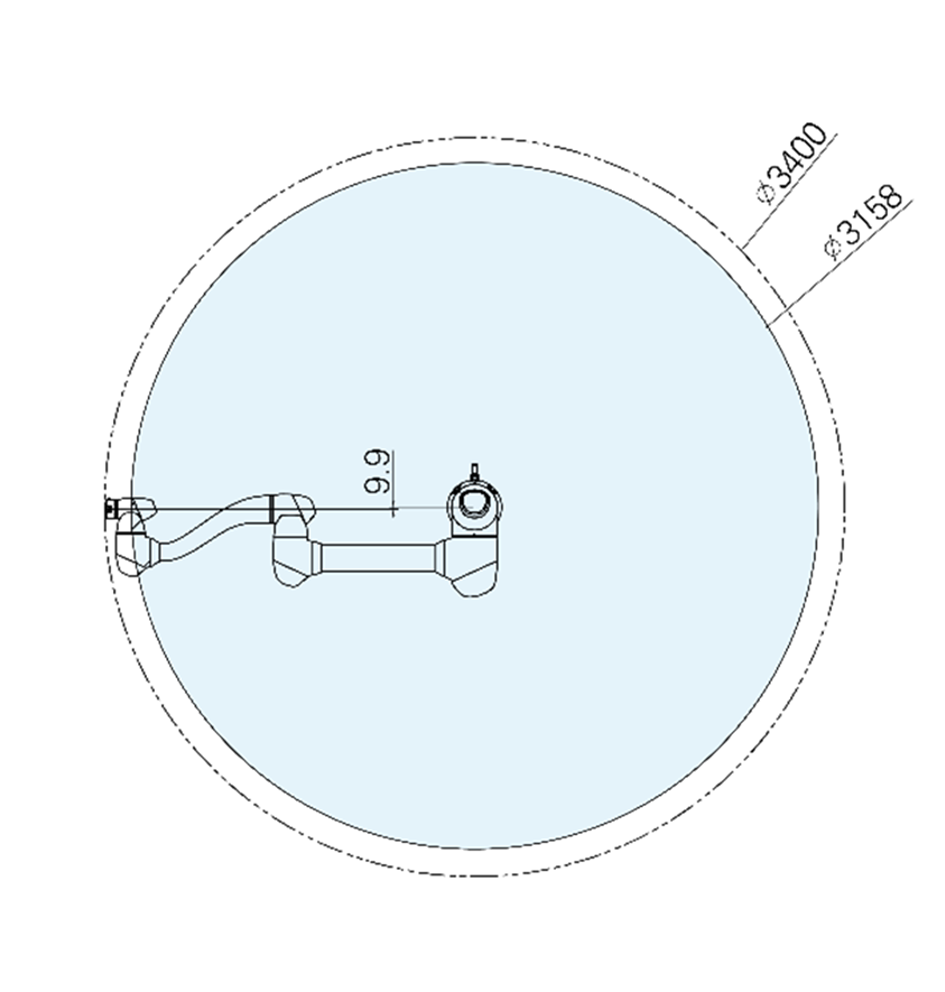
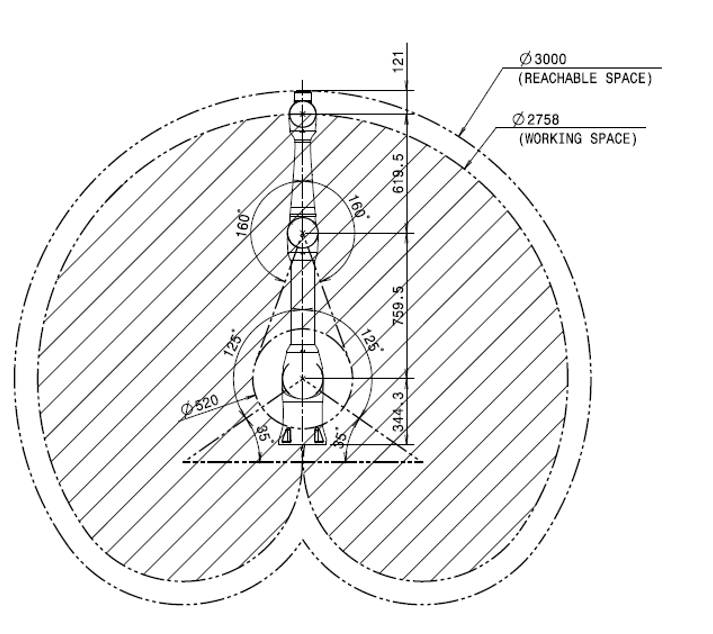
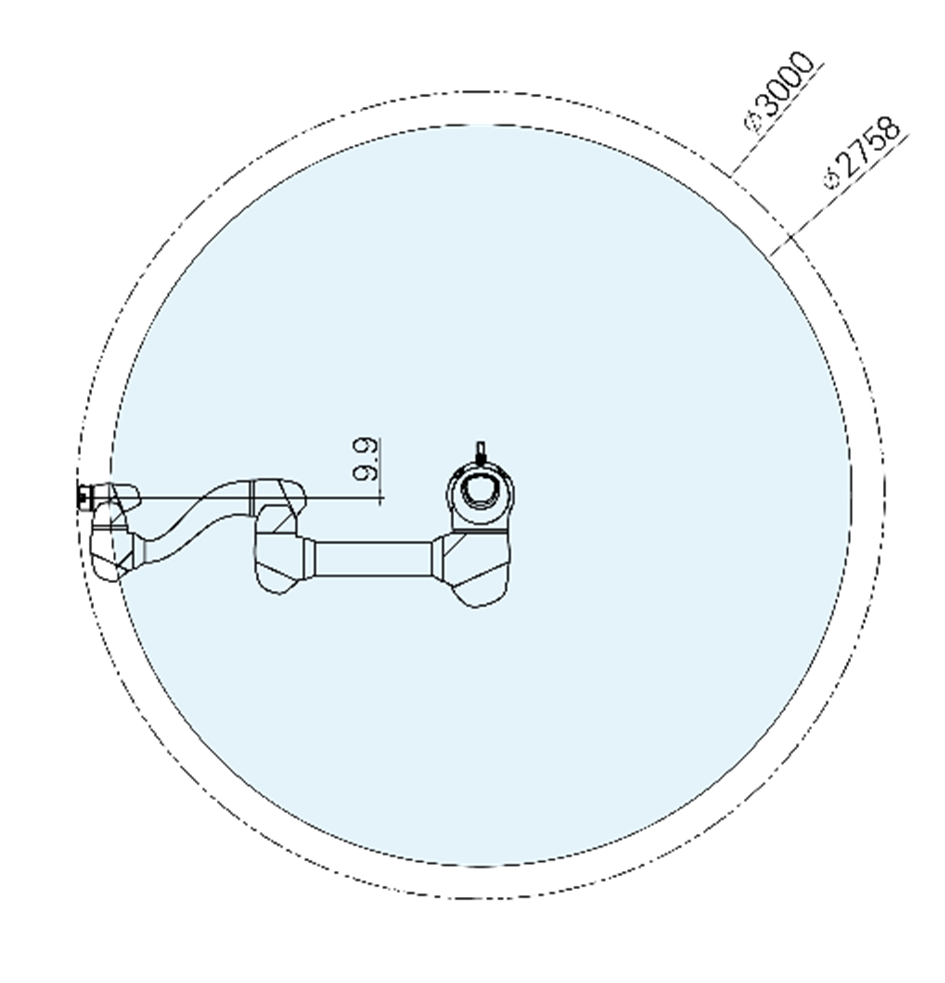
Przestrzeń operacyjna robota
M0609
 |  |
M0617
 |  |
M1013
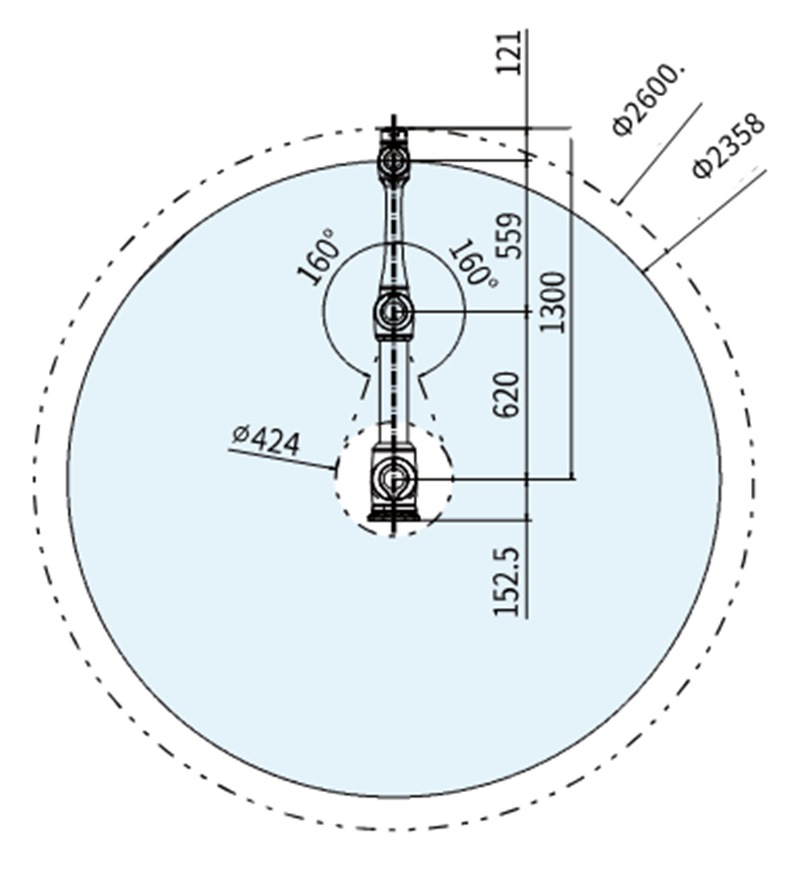 | 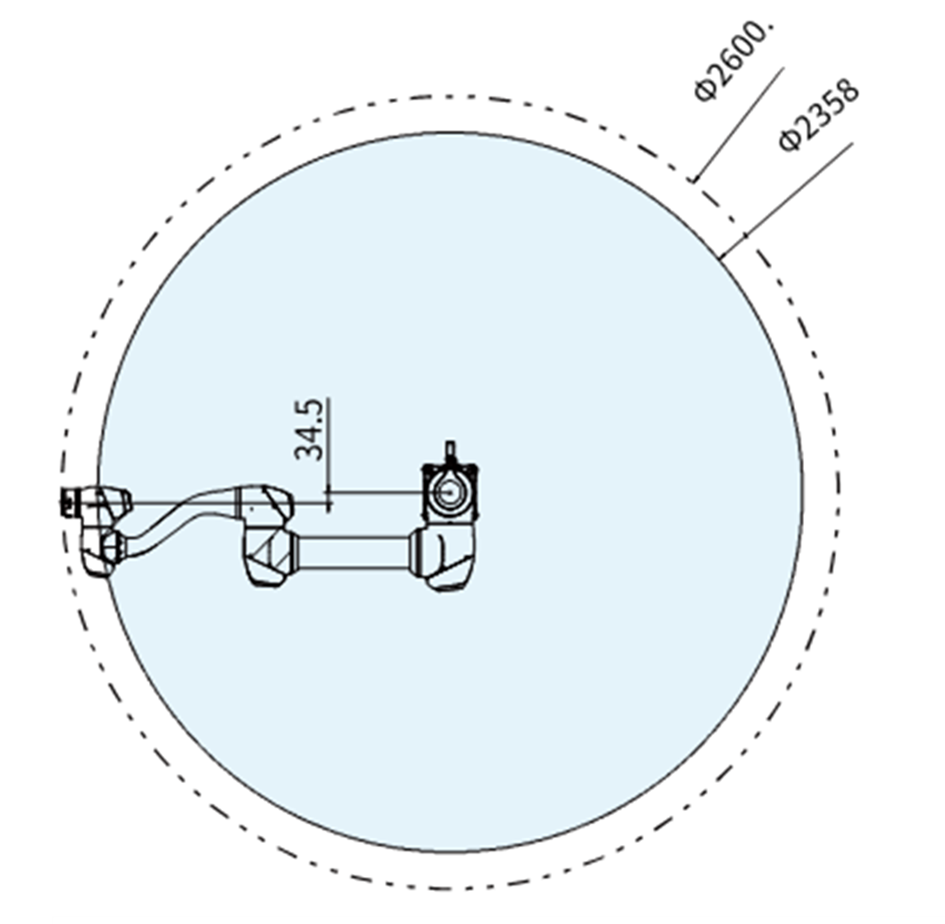 |
M1509
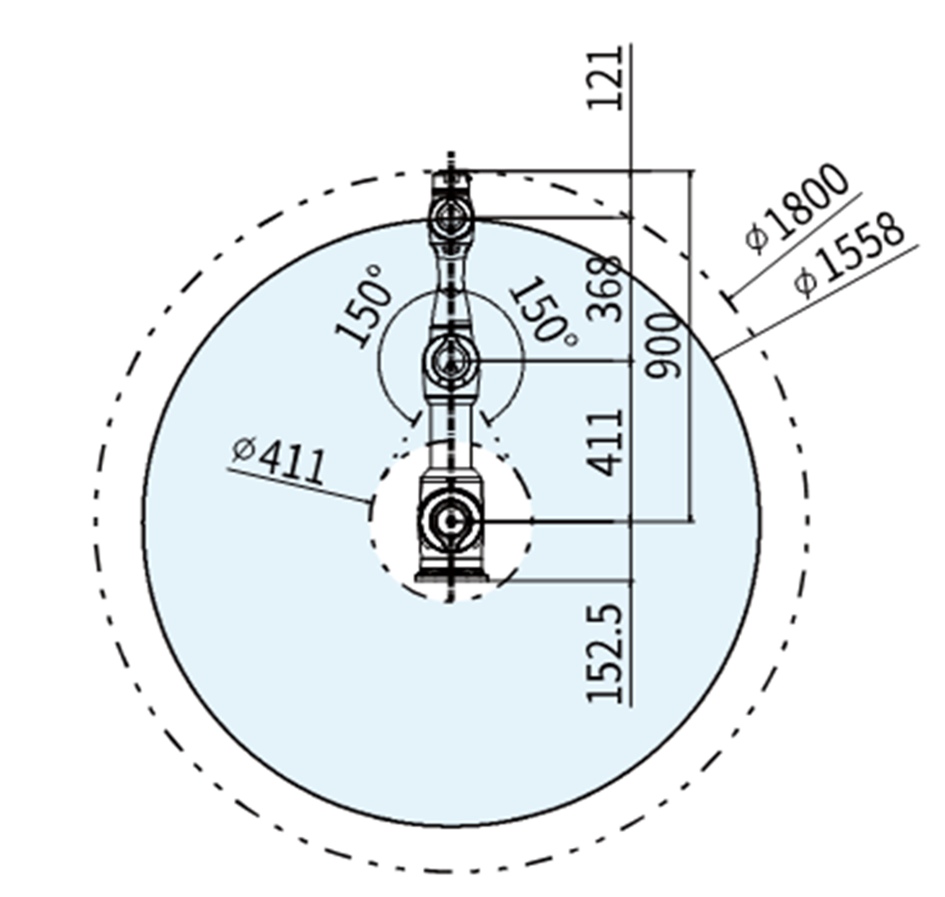 | 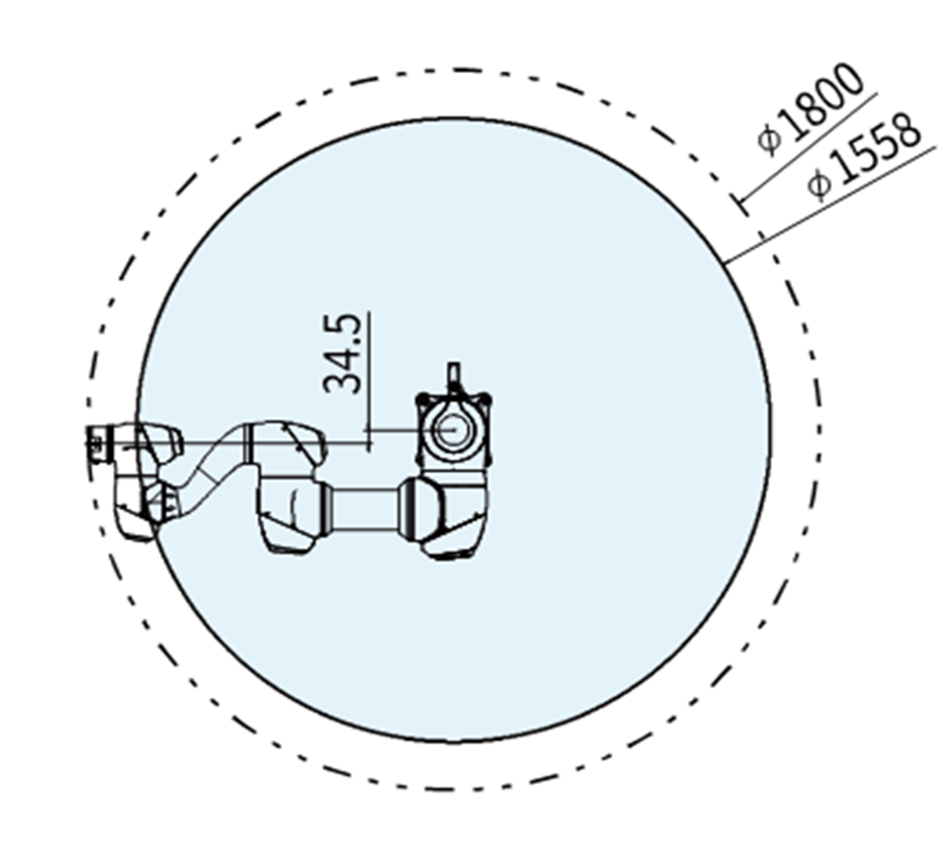 |
H2017
 |  |
H2515
 |  |
Maks. Ładowność w przestrzeni operacyjnej
Maksymalna ładowność robota w jego przestrzeni roboczej zmienia się w zależności od odległości od środka ciężkości. Ładowność na odległość jest następująca:
Uwaga
Ten schemat obciążenia przyjmuje niewielką objętość obciążenia narzędzia. Narzędzia o większej objętości będą miały większe ograniczenia w ładowności powyżej środka ciężkości narzędzia w porównaniu z narzędziem o równej masie, ale mniejszej objętości, a w takich przypadkach mogą wystąpić wibracje.
M0609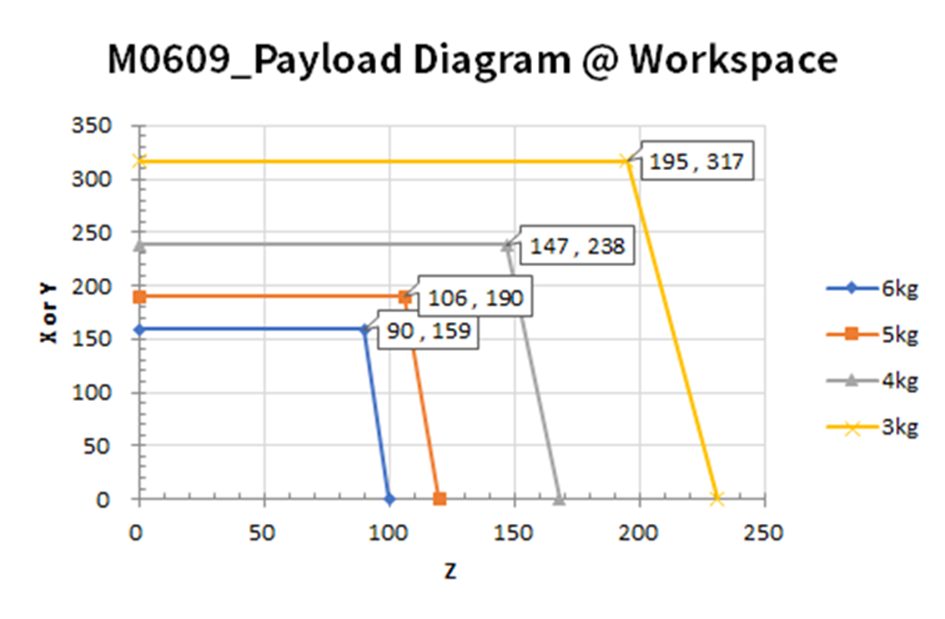 | M0609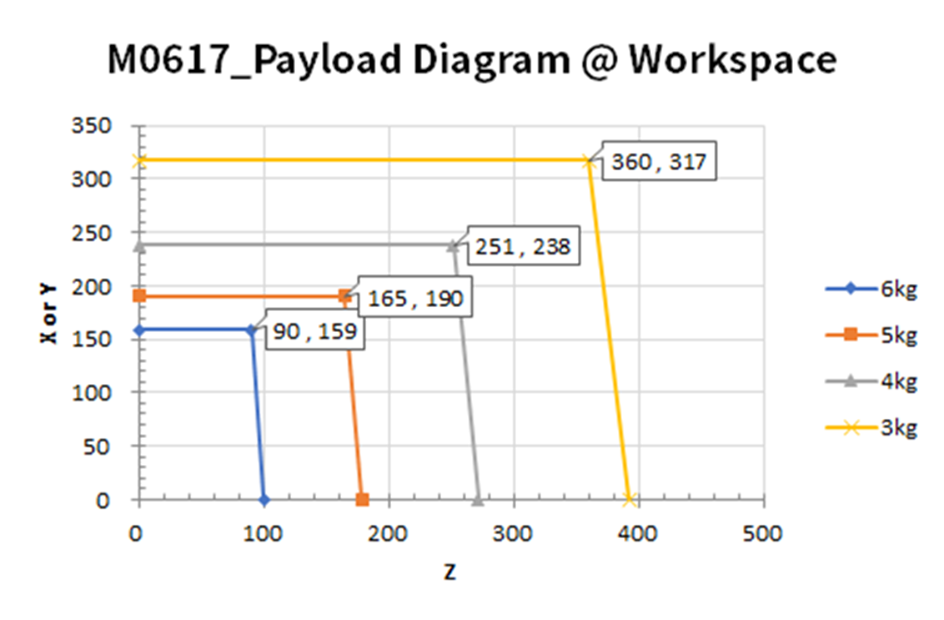 |
M1013 | M1509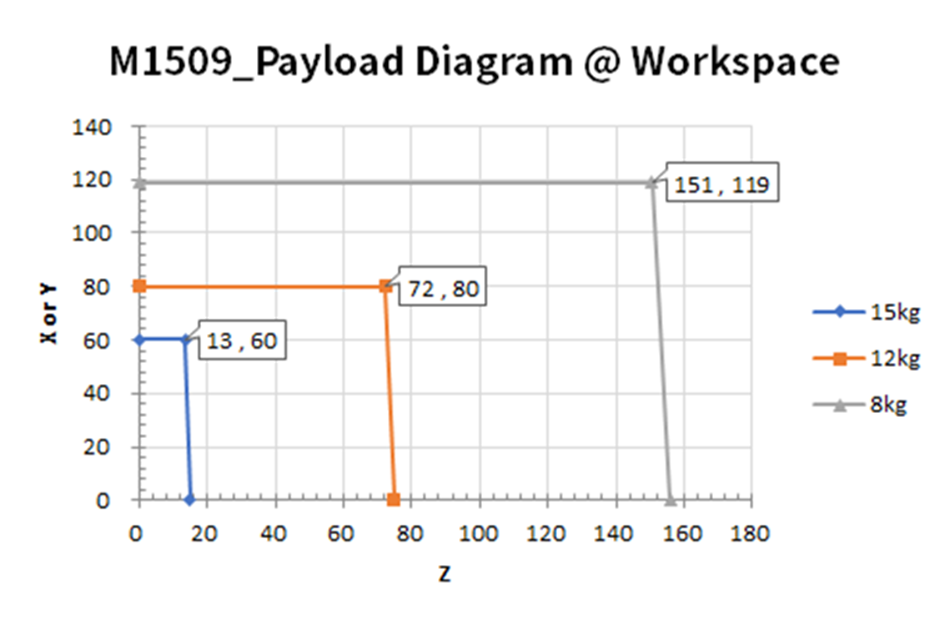 |
H2017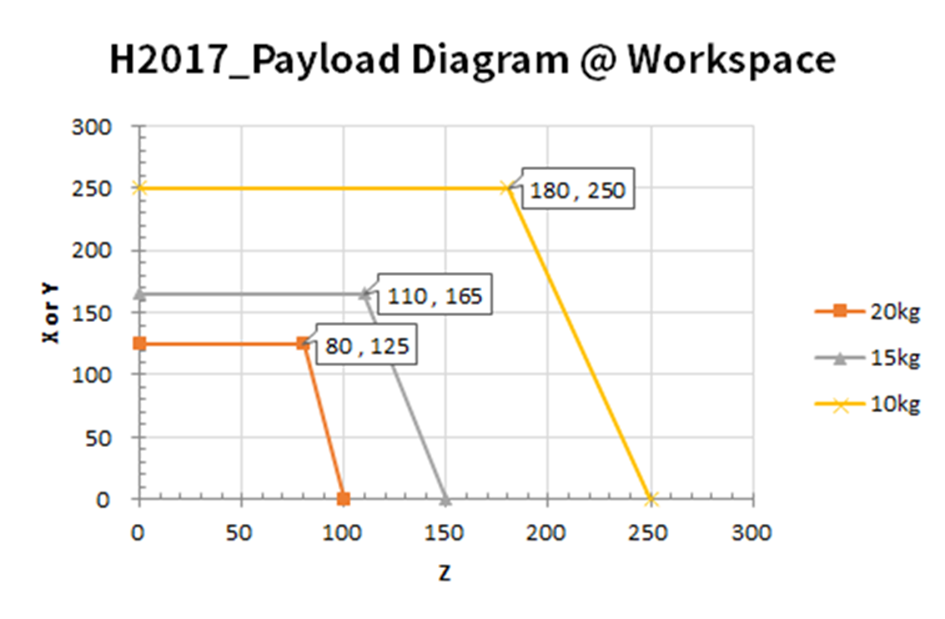 | H2515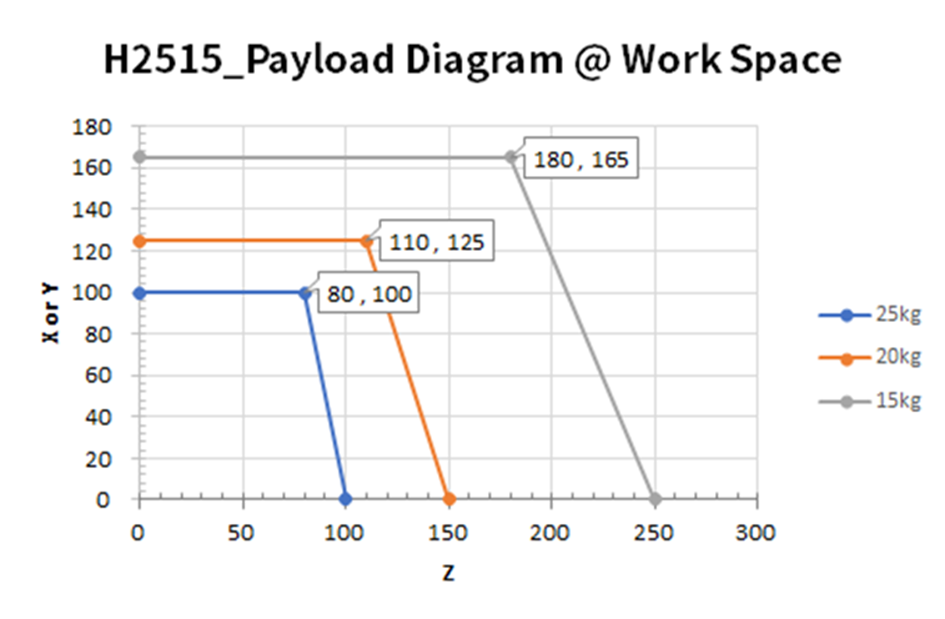 |
Dozwolony moment i bezwładność
Dopuszczalny moment i bezwładność robota J4-J6 są następujące:
Nazwa modelu | J4 | J5 | J6 | |||
|---|---|---|---|---|---|---|
Dozwolony moment | Bezwładność | Dozwolony moment | Bezwładność | Dozwolony moment | Bezwładność | |
M0609 | 36 Nm | 1.6 kg.㎡ | 36 Nm | 1.6 kg.㎡ | 36 Nm | 1.6 kg.㎡ |
M0617 | ||||||
M1013 | ||||||
M1509 | ||||||
H2017 | 145 Nm | 8.0 kg.㎡ | 81 Nm | 4.5 kg.㎡ | 36 Nm | 2.0 kg.㎡ |
H2515 | ||||||
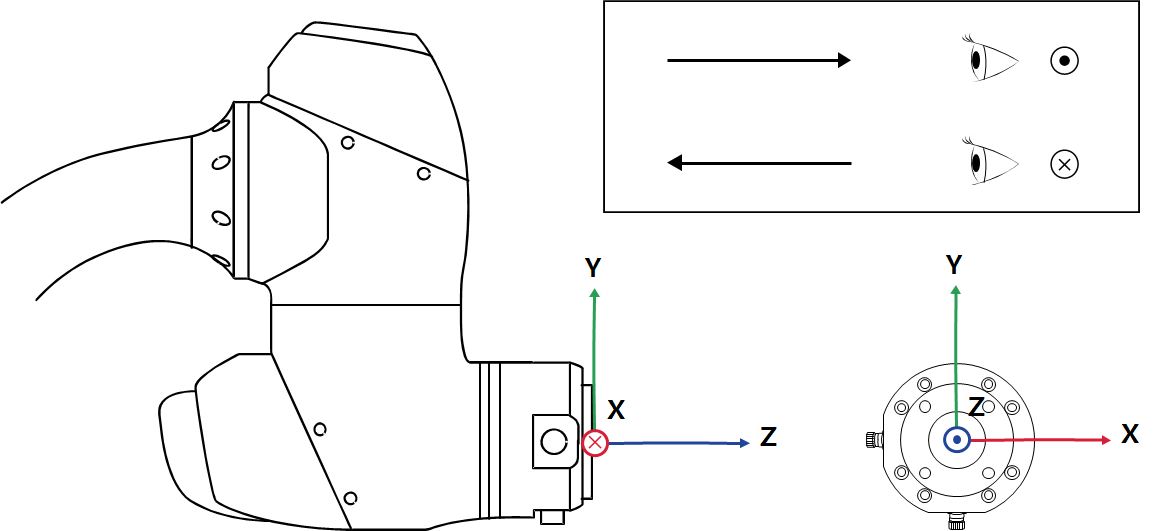
Punkt środkowy narzędzia (TCP)
Patrz rysunek poniżej, aby zapoznać się z protokołem TCP.
Podstawowe dane techniczne
Nazwa modelu | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 | |
|---|---|---|---|---|---|---|---|
Waga | 27 kg. | 34 kg. | 33 kg. | 32 kg. | 79 kg. | 77 kg. | |
Ładunek w promieniu roboczym | 6 kg. | 6 kg. | 10 kg. | 15 kg. | 20 kg. | 25 kg. | |
Maks. Promień roboczy | 900 mm | 1700 mm | 1300 mm | 900 mm | 1700 mm | 1500 mm | |
Liczba osi | 6 | ||||||
Maks. Szybkość TCP | Powyżej jednego m/s. | ||||||
Powtarzalność pozycji (ISO 9283) | ±0.03 mm | ±0.1 mm | ±0.05 mm | ±0.03 mm | ±0.1 mm | ||
Stopień ochrony | IP 54 | ||||||
Hałas | < 65 dB | ||||||
Kierunek instalacji | Dowolna orientacja | Tylko podłoga | |||||
Kontroler i nauczania wisiorek | Kontroler Doosan i sterownik nauczania | ||||||
Wibracje i przyspieszenie | 10≤f㎐ - 0,075 mm amplituda 57≤f≤150㎐ – 1G. | ||||||
Uderzenie | Maks. Amplituda: 50㎨(5G)
| ||||||
Temperatura pracy | ℃ 45 ℃ (273K do 318K) | ||||||
Temperatura przechowywania | -5 ℃ ~ 50 ℃ (268K do 323K) | ||||||
Wilgotność | 20% ~ 80% | ||||||
Dane techniczne osi
Nazwa modelu | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 |
|---|---|---|---|---|---|---|
Kąt pracy | ||||||
J1 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
J2 | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±125° (TP:±95°) | ±125° (TP:±95°) |
J3 | ±150° (TP:±125°) | ±165° (TP:±145°) | ±160° (TP:±135°) | ±150° (TP:±125°) | ±160° (TP:±135°) | ±160° (TP:±135°) |
J4 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
J5 | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) |
J6 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
Maks. Prędkość na oś (znamionowa ładowność) | ||||||
J1 | 150 °/s. | 100 °/s. | 120 °/s. | 150 °/s. | 100 °/s. | 100 °/s. |
J2 | 150 °/s. | 100 °/s. | 120 °/s. | 150 °/s. | 80 °/s. | 80 °/s. |
J3 | 180 °/s. | 150 °/s. | 180 °/s. | 180 °/s. | 100 °/s. | 100 °/s. |
J4 | 225 °/s. | 225 °/s. | 225 °/s. | 225 °/s. | 180 °/s. | 180 °/s. |
J5 | 225 °/s. | 225 °/s. | 225 °/s. | 225 °/s. | 180 °/s. | 180 °/s. |
J6 | 225 °/s. | 225 °/s. | 225 °/s. | 225 °/s. | 180 °/s. | 180 °/s. |