Podłączanie urządzeń zewnętrznych
Podłączanie urządzeń zewnętrznych - czujnik wizyjny
Robot może być połączony z czujnikiem wizyjnym (kamera 2D do pomiaru położenia obiektu), a pomiary czujnika wizyjnego mogą być przesyłane do robota za pośrednictwem sieci, aby połączyć się z poleceniami robota.
Ustawienie czujnika wizyjnego
Ustawienie połączenia komunikacyjnego
Podłącz porty LAN urządzeń i zastosuj komunikację TCP/IP, aby przesłać pomiary czujnika wizyjnego do robota. (Patrz Połączenie sieciowe) Ustaw adres IP czujnika wizyjnego na pasmo TCP/IP 192.168.137.xxx, aby umożliwić komunikację TCP/IP.
Ustawienie pracy wizji
Aby wykonać pomiar położenia obiektu, konieczne jest posiadanie danych wejściowych obrazu i nauczania widzenia obiektu docelowego za pomocą czujnika wizyjnego. Zapoznać się z dedykowanym programem ustawień pracy wizyjnej dostarczonym przez producenta czujnika wizyjnego.
Ustawienie formatu danych pomiarowych
Aby użyć danych pomiarowych czujnika wizyjnego w robocie, konieczne jest wykonanie kalibracji współrzędnych robota wizyjnego i należy to wykonać przed rozpoczęciem pracy za pomocą programu ustawiania czujnika wizyjnego. Dane pomiarowe czujnika wizyjnego muszą być przesyłane przy użyciu następujących ustawień formatu:
Formatowanie | poz | , | x | , | y | , | kąt | , | var1 | , | wersja 2 | , | … |
|---|
pozycja: Separator wskazujący początek danych pomiarowych (prefiks)
x: Współrzędna X obiektu mierzona za pomocą czujnika wizyjnego
y: Współrzędna Y obiektu mierzona za pomocą czujnika wizyjnego
kąt: Wartość kąta obrotu obiektu mierzona za pomocą czujnika wizyjnego
Var1 … VARN: Informacje mierzone za pomocą czujnika wizyjnego (np. przykład wymiaru obiektu / wartości kontroli defektu) poz.,254.5,-,45.3,1,50.1 (opis: X=254.5, y=-38.1, kąt=145.3, var1=38.1, var2=50.1)
Ustawienia programu robota
Po zakończeniu fizycznego połączenia komunikacyjnego między czujnikiem wizyjnym a robotem i ustawieniem czujnika wizyjnego należy ustawić program umożliwiający połączenie czujnika wizyjnego z programem robota. Możliwe jest podłączenie/komunikacja/sterowanie funkcjami zewnętrznego czujnika wizyjnego za pomocą Doosan Robot Language (DRL), a także skonfigurowanie programu w programie Task Writer.
Szczegółowe informacje i obszerne przykłady języka Doosan Robot Language (DRL) na temat funkcji zewnętrznych czujników wizyjnych znajdują się w instrukcji programowania.
Podłączanie urządzenia zewnętrznego – platforma DART
Platforma DART to oprogramowanie, które działa na komputerze stacjonarnym lub laptopie z systemem operacyjnym Windows. Po podłączeniu kontrolera i komputera stacjonarnego/laptopa za pośrednictwem portu LAN wszystkie funkcje manipulatora nauczania są dostępne od momentu uruchomienia platformy DART. W tym momencie wymagana jest następująca procedura konfiguracji, aby połączyć się ze sterownikami podrzędnymi w sterowniku.
Wyszukiwanie adresów IP i ustawienie połączenia
Ustawienie połączenia komunikacyjnego
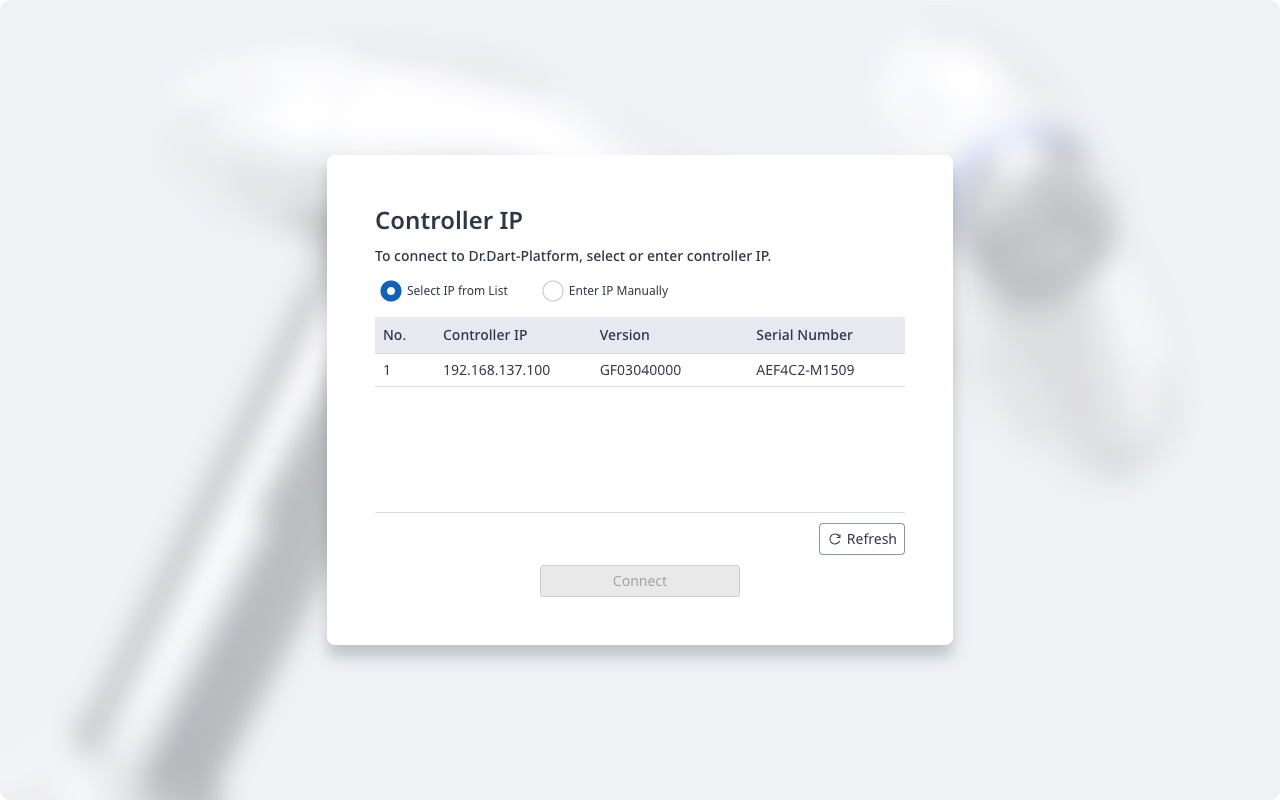
Gdy platforma DART jest uruchamiana po podłączeniu laptopa do portu LAN kontrolera, automatycznie przeszukuje się adres IP kontrolera, informacje o wersji kontrolera podrzędnego i numer seryjny robota wymagany do nawiązania połączenia.
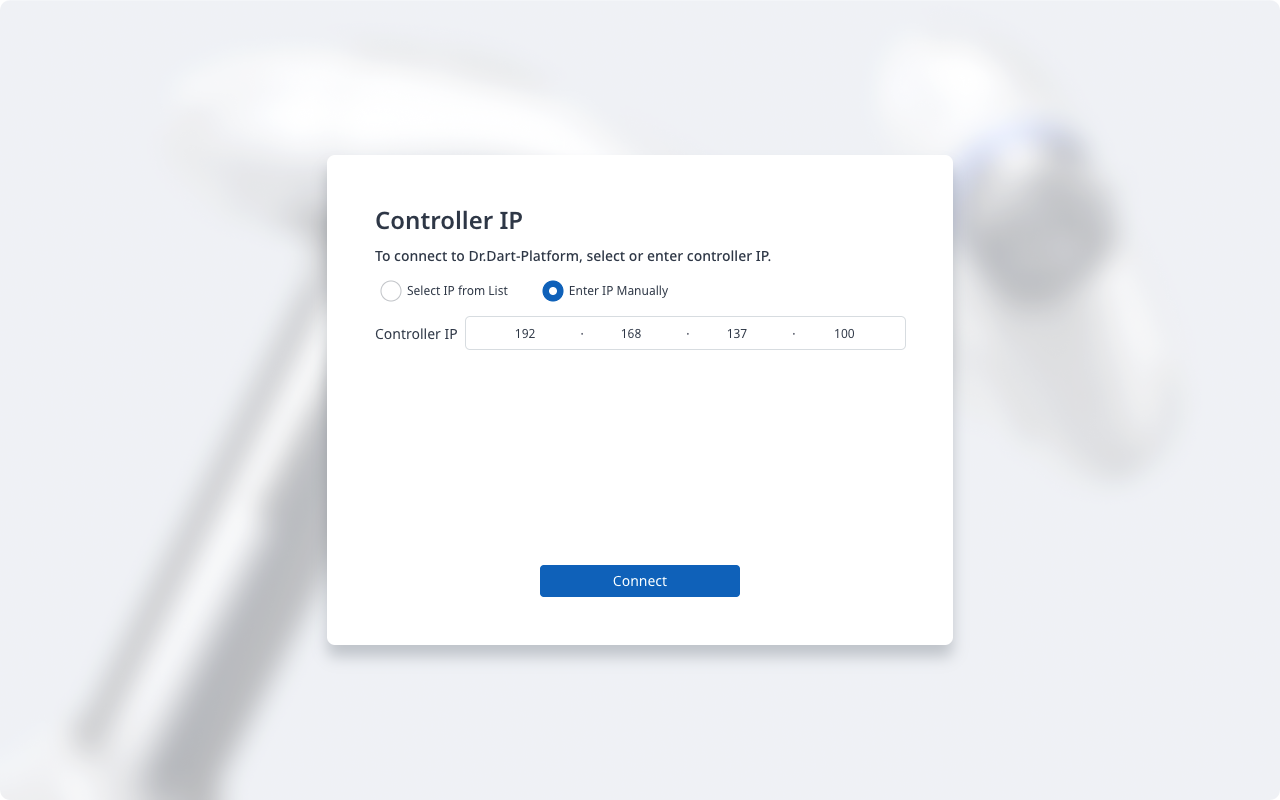
Jeśli wyszukiwanie nie powiedzie się, naciśnij przycisk Odśwież, aby odświeżyć lub dotknij opcji Wprowadź adres IP ręcznie, aby ręcznie wprowadzić adres IP kontrolera.
Wybranie numeru seryjnego robota, który ma być podłączony i naciśnięcie przycisku Connect (Połącz) powoduje nawiązanie połączenia między platformą DART a sterownikiem podrzędnym i umożliwia normalną obsługę robota.
W przypadku wystąpienia problemu z połączeniem, należy wykonać poniższą procedurę, ale jeśli problem będzie się powtarzał, należy skontaktować się z działem sprzedaży lub serwisu w celu uzyskania pomocy.
Jeśli wyniki wyszukiwania dla adresu IP sterownika podłączalnego, informacji o wersji sterownika podrzędnego i numeru seryjnego robota nie są wyświetlane: Naciśnij przycisk Odśwież, aby ponownie wyszukać i spróbuj ponownie nawiązać połączenie zgodnie z powyższą procedurą.
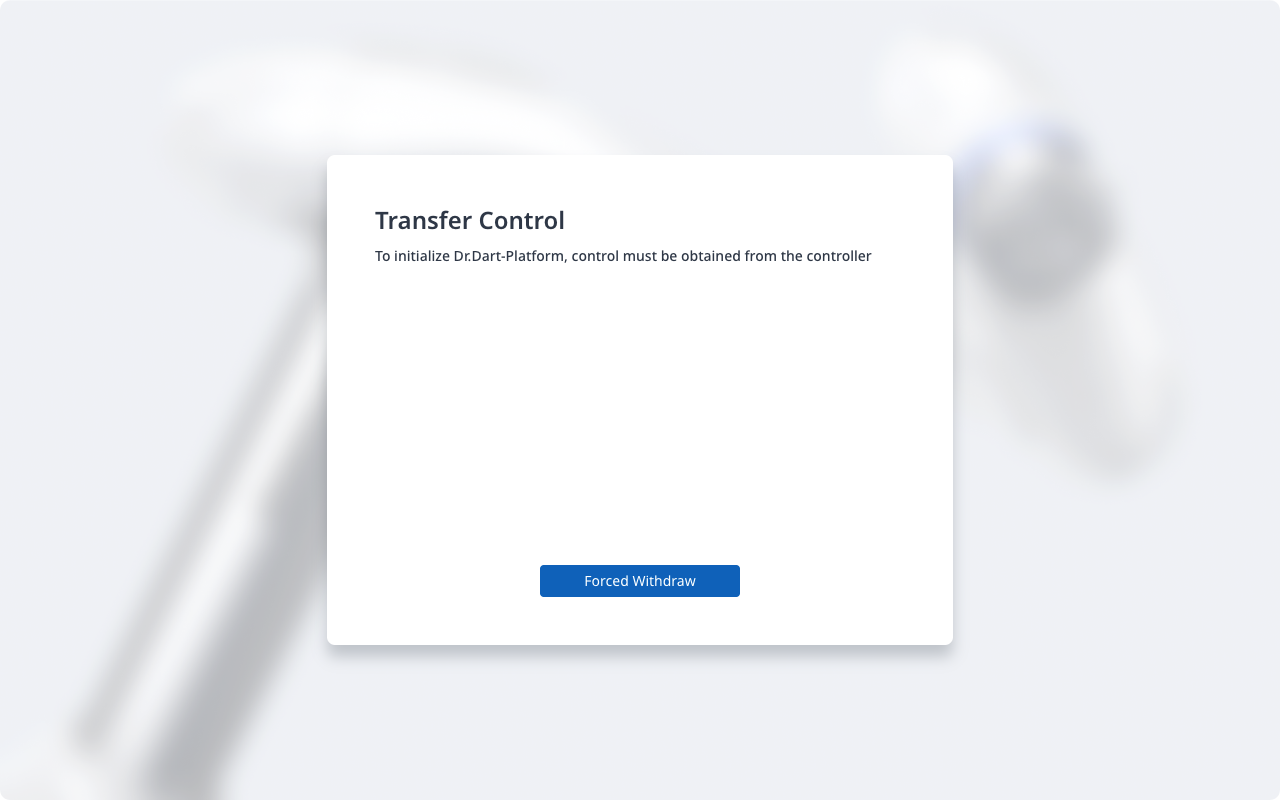
Następnie, jeśli zobaczysz stronę Kontrola transferu, jak pokazano poniżej, dotknij przycisku Wymuszone wycofanie, aby spróbować połączyć się z platformą.