
Przenieś ekran
Przesuń układ menu
| Item | Description | |
|---|---|---|
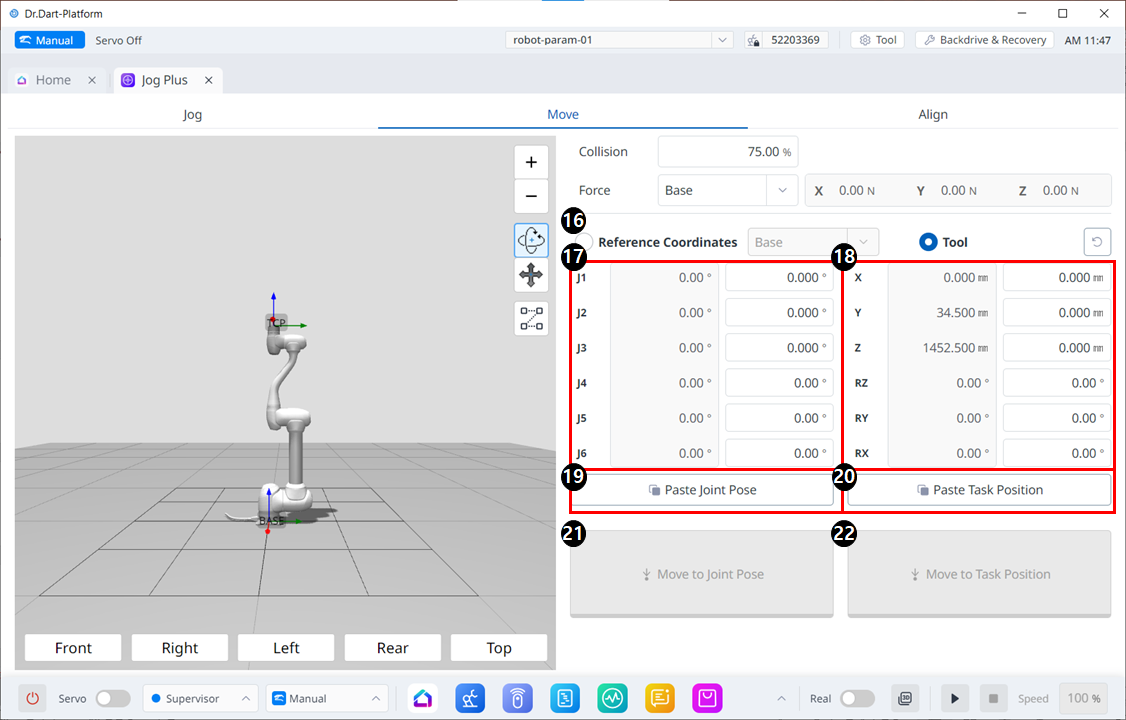
| 16 | Reference Coordinates | Wybierz układ współrzędnych odniesienia, który będzie używany dla współrzędnych zadania na rysunku 18. Możesz wybrać współrzędne podstawowe, światowe lub użytkownika. |
| 17 | Joint Posture | Wyświetla aktualną postawę robota i docelową postawę stawu. |
| 18 | Task Posture | Wyświetla bieżącą postawę robota i docelową postawę zadania, które pasują do wybranego układu współrzędnych odniesienia. |
| 19 | Paste Joint Posture | Wklej wartość postawy skopiowaną do schowka do panelu wspólnej postawy. |
| 20 | Paste Task Posture | Wklej wartość postawy skopiowaną do schowka do panelu postawy zadania. |
| 21 | Joint Move button | Ten przycisk powoduje przejście robota do docelowej pozycji stawu. |
| 22 | Task Move button | Ten przycisk powoduje przejście robota do docelowej pozycji zadania. |