Wykonaj na podstawie połączenia robota
Aby wyregulować kąt na podstawie połączenia robota, należy wykonać następujące czynności:
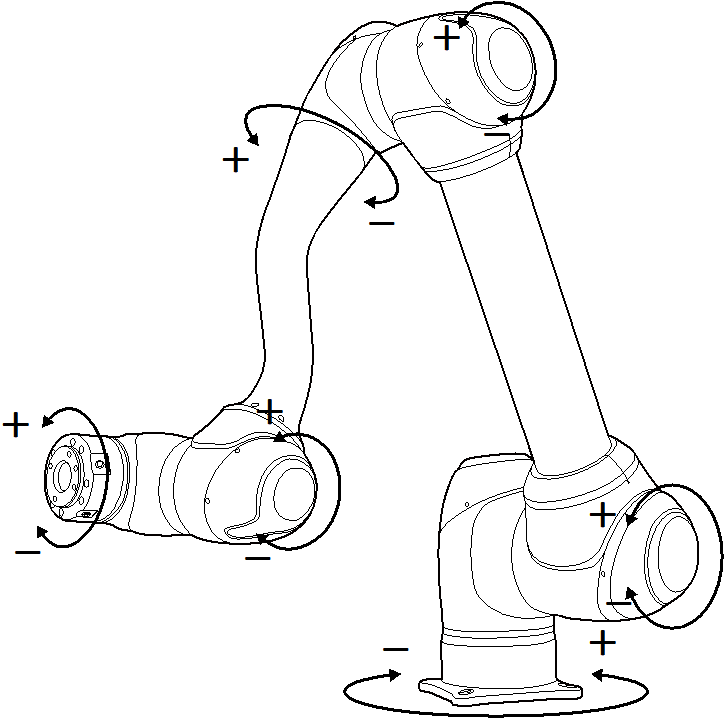
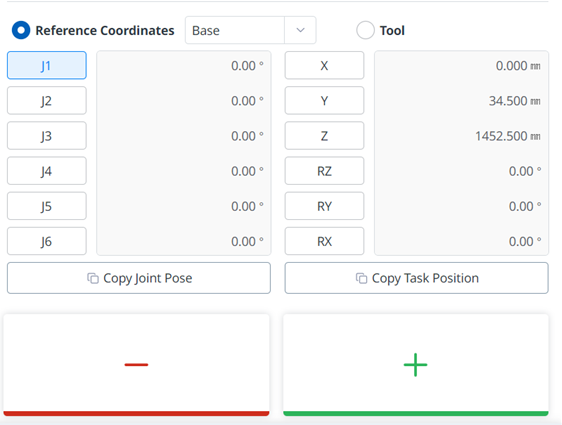
- Wybierz oś (J1-J6), aby dostosować kąt na panelu łączącym.
- Nacisnąć i przytrzymać przyciski kierunkowe (