
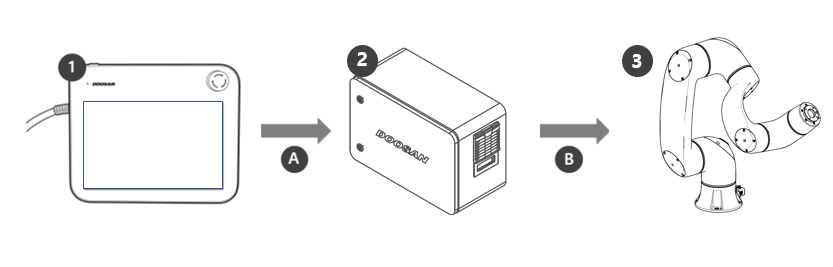
Konfiguracja systemu
| Nr | Nazwa | Opis |
|---|---|---|
| 1 | Sterowanie manipulatorem | To urządzenie zarządza całym systemem i jest w stanie nauczyć robota konkretnych pozycji lub dokonać ustawień związanych z manipulatorami i kontrolerami. |
| 2 | Sterownik | Służy do regulacji ruchu robota zgodnie z pozycją lub ruchem ustawionym przez manipulator nauczania. Posiada różne porty i/o, które pozwalają na podłączenie i korzystanie z różnego rodzaju urządzeń i urządzeń. |
| 3 | Manipulator | Jest to przemysłowy robot współpracujący, który może być używany z różnymi osprzętami narzędziowymi do transportu przedmiotów lub montażu części. |
| A. | Sterowanie/monitorowanie | |
| B. | Zasilanie/sieć |