Overzicht van Robotbewegingseigenschappen van de Task Editor
VERPLICHT NORMAAL 15 MIN

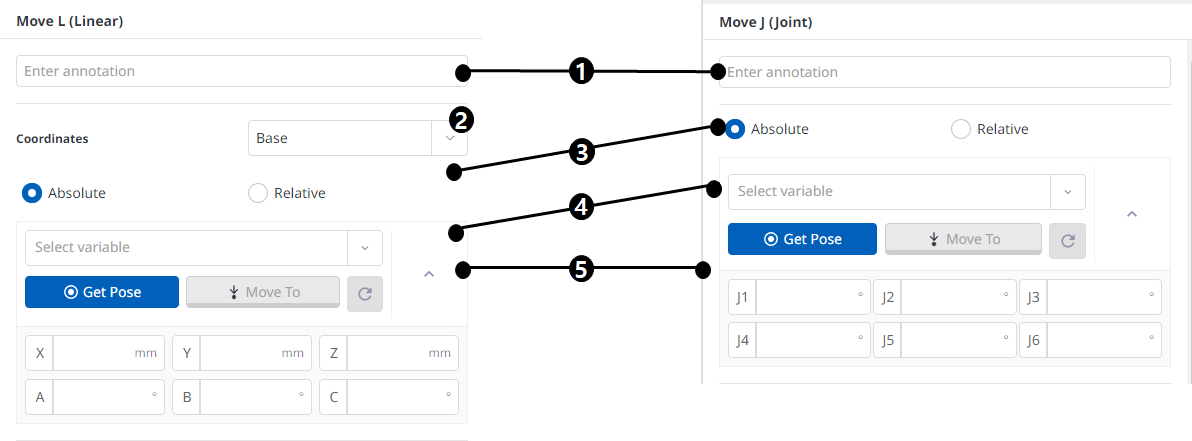
Dit is het eigenschappenscherm van de standaardbewegingen, MoveJ en MoveL-opdrachten. Andere bewegingen hebben ook soortgelijke eigenschappen.
- Als beweging wordt gemaakt met minimale instellingen, hoeft alleen de pose-informatie (5 in onderstaande afbeelding) te worden ingevoerd.

| Naam | Beschrijving | |
|---|---|---|
| 1 | Annotatie | Beschrijving of annotatie van de opdracht die u kunt vinden in het taakvenster |
| 2 | Coördinaten |
|
| 3 | Selecteer type verplaatsen |
|
| 4 | Selecteer variabele | Pose-informatie die als variabelen is geregistreerd, kan worden geselecteerd |
| 5 | Poseer informatie | Pose-informatie is ingevoerd
|
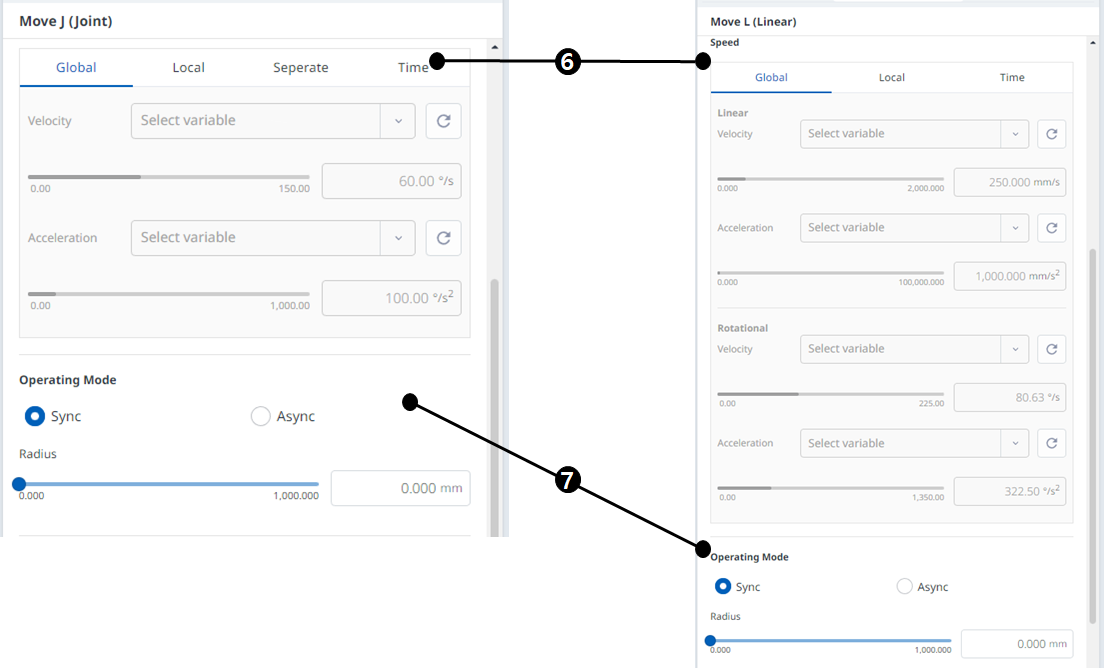
| 6 | Snelheidsinstelling |
|
| 7 | Bedrijfsmodus |
|
| 8 | Overvloeimodus | De optie die wordt gebruikt om te bepalen of de voorgaande beweging moet worden genegeerd of overschreven volgens de overvloeimodus van de volgende beweging wanneer de straal is ingesteld als optie van de voorgaande beweging |
Bedrijfsmodus
Synchroniseren
U kunt met Sync naar de volgende opdracht gaan wanneer de lopende opdracht is voltooid. Het is standaard ingesteld en wordt gebruikt in algemene situaties.
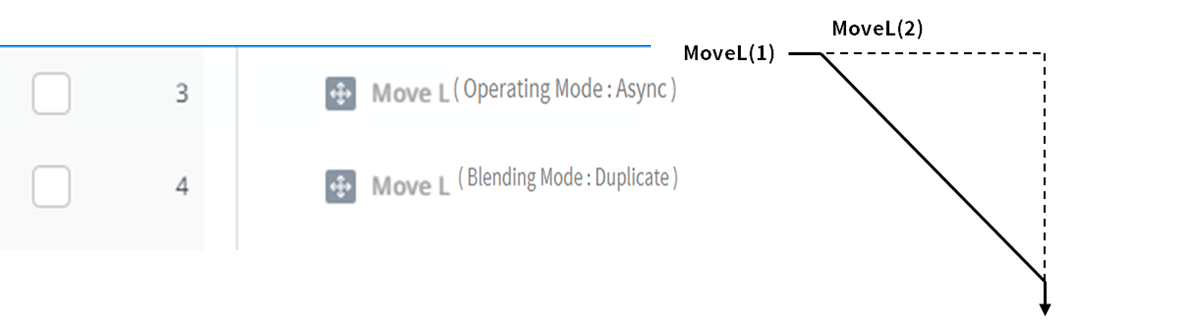
Asynchroon
Async start het volgende commando tegelijkertijd wanneer het commando beweging begint. Het wordt gebruikt om verschillende bewegingen soepel met elkaar te verbinden en het wordt ook gebruikt wanneer de signaaluitvoer gelijktijdig wordt in- en uitgeschakeld wanneer de beweging begint.
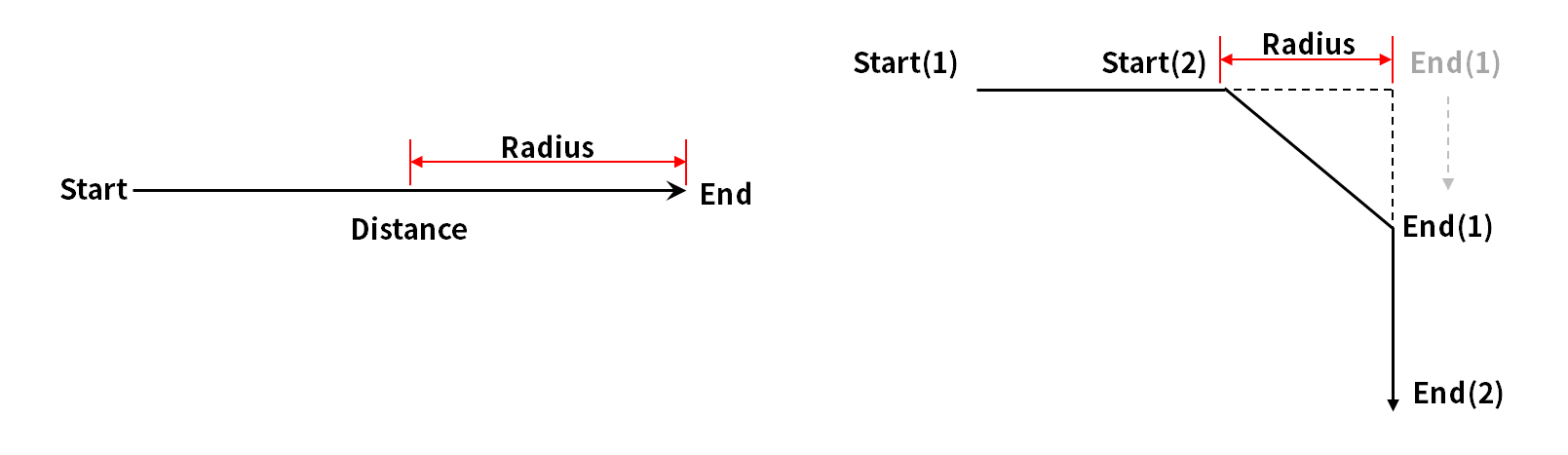
RADIUS
De optie RADIUS activeert de async-functie in het RADIUS-gedeelte voordat de Motion-opdracht het doelpunt bereikt. Met deze optie is het mogelijk om vloeiend verbinding te maken met de volgende bewegingsopdracht zonder de huidige bewegingsopdracht te stoppen. De straal is standaard ingesteld op 0 mm.
Voorzichtig
RADIUS-optie heeft de volgende kenmerken en limieten:
- RADIUS-functie kan alleen worden gebruikt in de synchronisatiemodus.
- Condities en berekeningen kunnen worden uitgevoerd in de asynchrone sectie binnen de radius.
- RADIUS mag niet groter zijn dan 1/2 van de totale afstand tussen de huidige en de doellocatie voordat de beweging wordt uitgevoerd.
- ex. Als de bewegingsafstand 100 mm is, is de maximaal beschikbare straal 50 mm.
- De volgende bewegingsopdrachten kunnen niet worden overvloeien tussen bewegingen: Blending wordt al toegepast in deze opdrachten, dus het toepassen van radius op deze opdrachten en het uitvoeren ervan leidt tot fouten. Het gebruik van opdrachten, zoals WaitMotion en Stopmotion, kan fouten helpen voorkomen.
- MoveSX, MoveSJ, MovePeriodic, MoveSpiral, MoveB
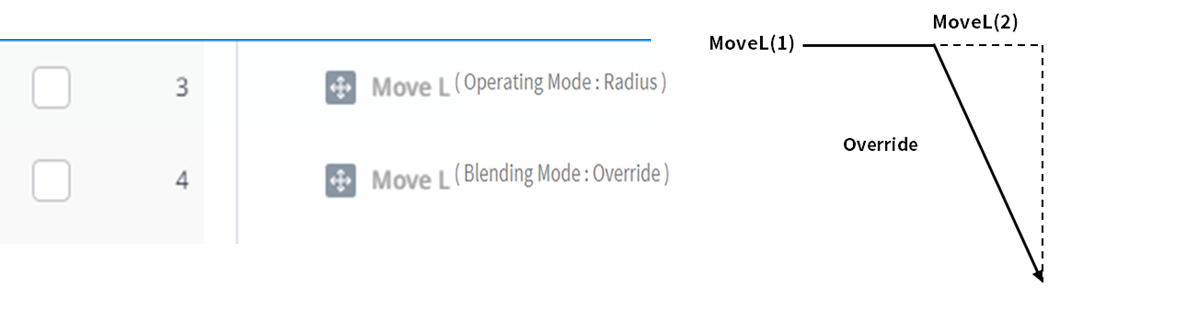
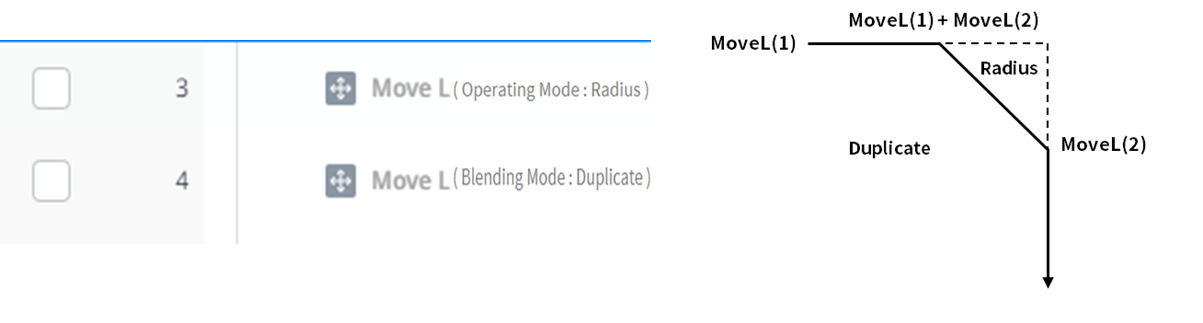
Overvloeimodus
Deze optie wordt gebruikt om te bepalen of de voorgaande beweging moet worden genegeerd of overschreven volgens de overvloeimodus van de volgende beweging wanneer de straal is ingesteld als optie van de voorgaande beweging.
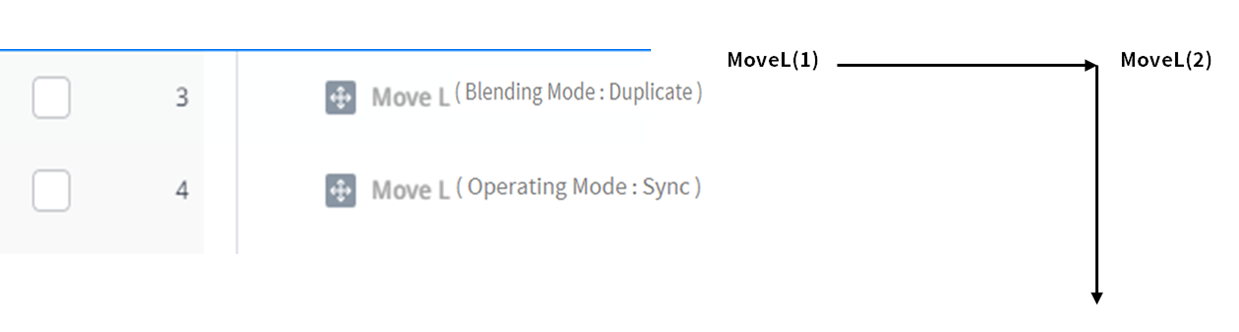
Dupliceren
Dupliceren is een modus die de voorgaande beweging handhaaft, zodat de volgende beweging de voorgaande beweging overlapt.
Negeren
Negeren negeert en overschrijft de voorgaande beweging om de volgende beweging uit te voeren.