Inleiding product (CS-12P)
Benamingen en functies
DC regelaar (CS-12P)
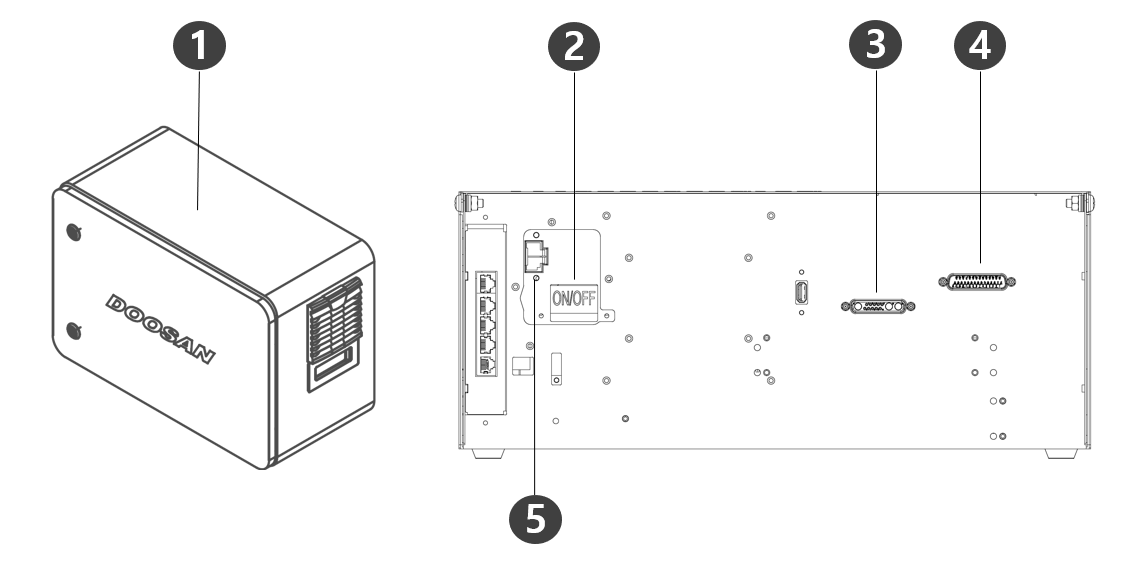
Nr. | Item | Omschrijving |
1 | I/O connection terminal (internal) | Wordt gebruikt om de regelaar of randapparatuur aan te sluiten. |
2 | Power switch | Wordt gebruikt om de hoofdstroom van de regelaar aan of uit te zetten. |
3 | Teach pendant cable connection terminal | Wordt gebruikt om de instructiependantkabel met de regelaar te verbinden. |
4 | Robot cable connection terminal | Wordt gebruikt om de robotkabel aan te sluiten op de regelaar . |
5 | Power connection terminal | Wordt gebruikt om de voeding van de regelaar aan te sluiten. |
Systeemconfiguratie
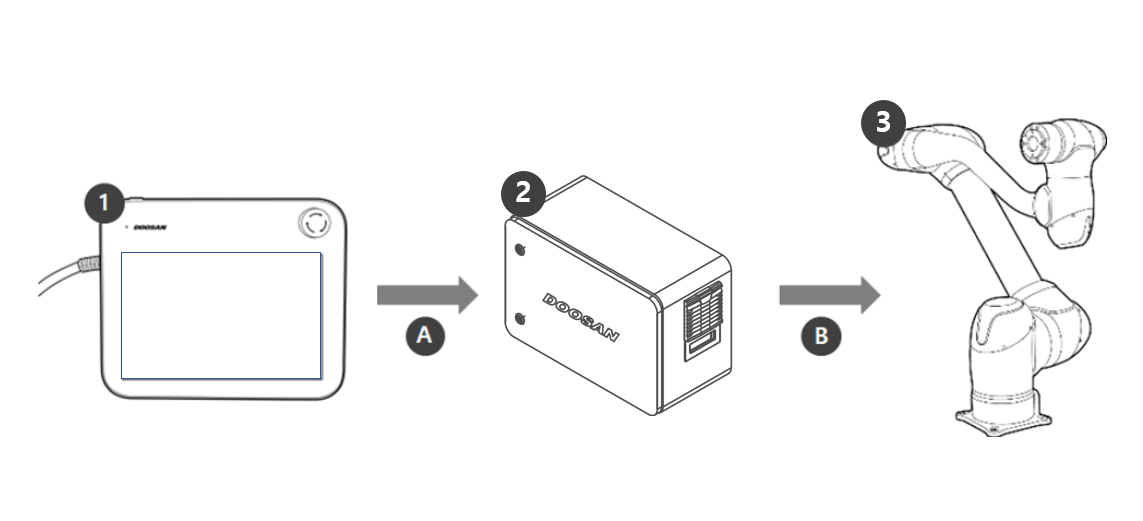
| 1 | Instructiependant | Een apparaat dat het hele systeem beheert en in staat is om de robot specifieke poses aan te leren en de instellingen van de manipulator en de regelaar aan te passen. |
| 2 | Regelaar | Deze bestuurt de bewegingen van de robot aan de hand van de pose of de beweging die door de instructiependant is ingesteld. Beschikt over verschillende I/O-poorten die de aansluiting en het gebruik van verschillende uitrustingen en apparaten mogelijk maken. |
| 3 | Manipulator | Een industriële collaboratieve robot die transport- of montagetaken kan uitvoeren met behulp van verschillende tools. |
| A | Opdracht/ monitoren | |
| B | Voeding/ netwerk |
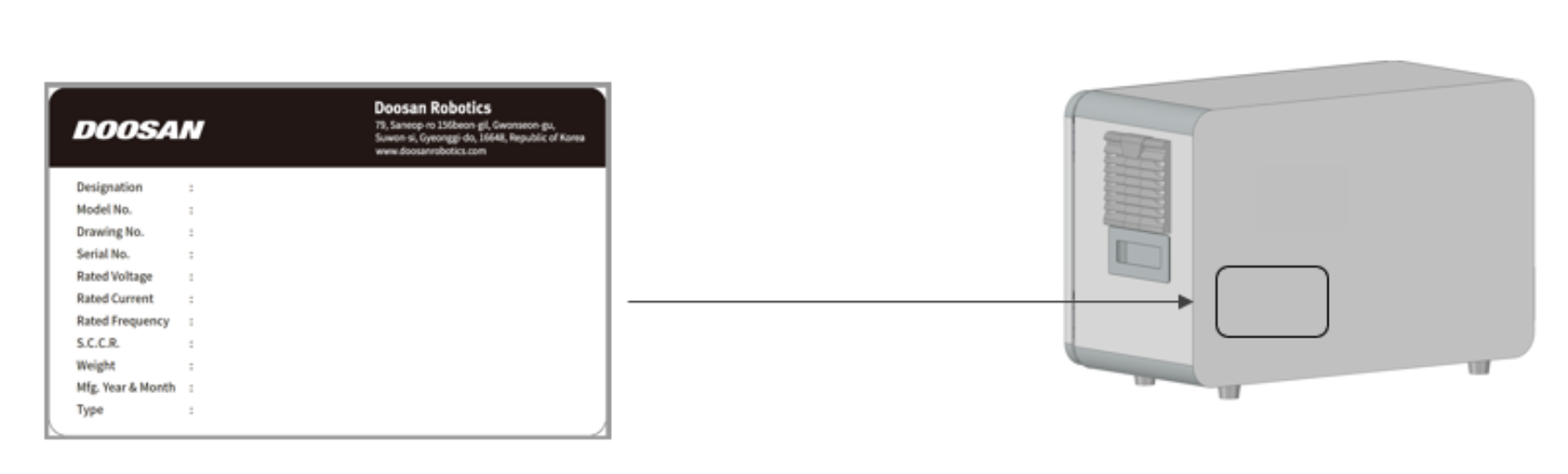
Naamplaatje en label