
World Coordinates Reference Coordinates instellen op verplaatsing
Volg deze stappen om de robot te verplaatsen op basis van World Coordinates:
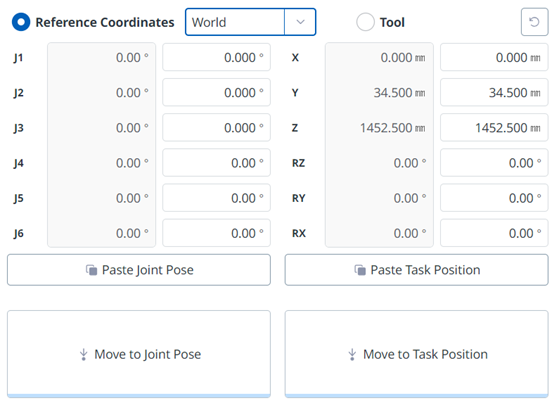
- Selecteer het tabblad Verplaatsen en Referentiecoördinaten.
- Selecteer wereld als weergavecoördinaten en selecteer het tabblad wereld.
- Configureer de pose om te verplaatsen met verwijzing naar de wereldcoördinaten.
- Tik op de knop verplaatsen naar bijbehorende pose en houd deze ingedrukt om naar de ingestelde coördinaten te gaan.