Instelling ruimtelimiet
Met het werkcel-item ruimtelimiet wordt een virtuele grens ingesteld op de buitenste zone van de robot. De robot kan worden bediend zonder de ruimtelimieten in te stellen, maar het wordt aanbevolen om ruimtelimieten in te stellen om een veilige werking van de robot te garanderen.
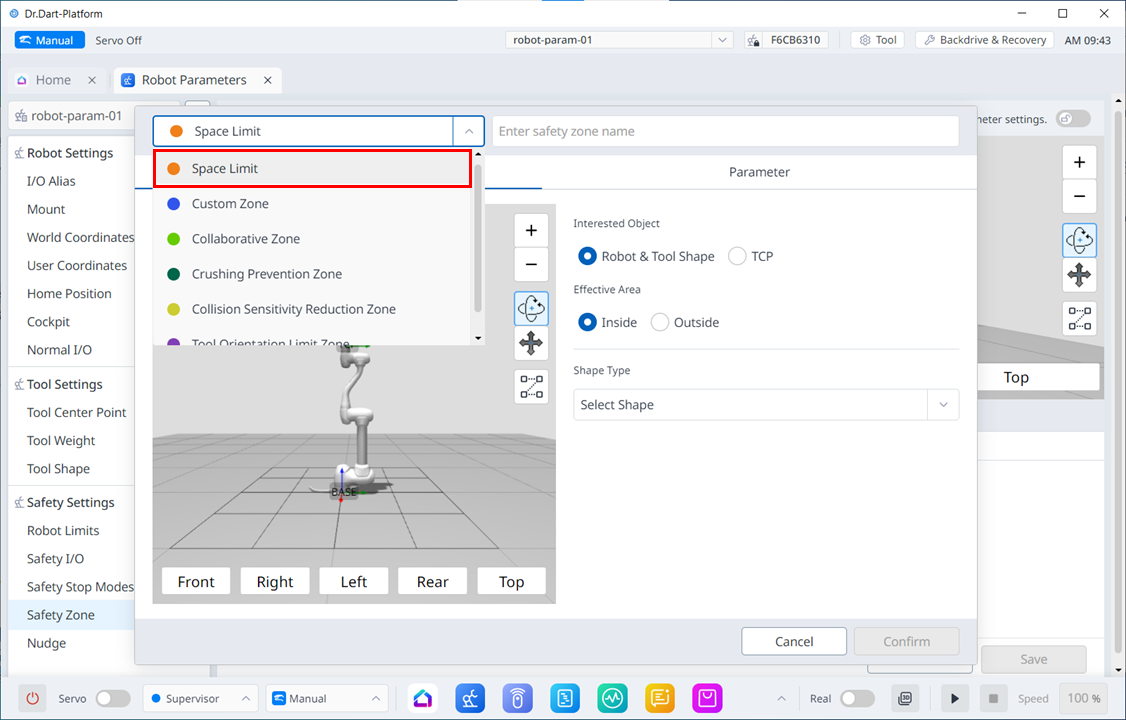
U kunt de ruimtelimiet bereiken via het vervolgkeuzemenu linksboven in Robotparameters > Veiligheidsinstellingen > Veiligheidsinstellingen > nieuwe werkruimte toevoegenen onder vormtype kunt u bol, cilinder, kubus, gekantelde kubus of polyëder selecteren om in te stellen.
- Inspectiepunt kan worden ingesteld als de robot of TCP, en de geldige ruimte kan worden ingesteld als binnen- of buitenzijde.
- De bewakingszone kan worden ingesteld als robot of TCP. Hiermee stelt u in of u de binnen- of buitenzone wilt detecteren of niet.
- De standaardwaarde is de gehele zone en het ingestelde interieur.
- De robot kan correct worden ingesteld nadat deze in de ingestelde veiligheidszone is geplaatst.
Als u een ruimtelimiet voor de robot wilt instellen, tikt u onder Safety Workspaces op de knop Add New Workspace en selecteert u onder Shape Type een van de volgende typen: Cube, cilinder, Multi-plane Box, Sphere, of gekantelde cuboid. Het veiligheidswachtwoord is vereist tijdens het instellen en inschakelen.