Overzicht van Euler-hoek
Euler Angle is een manier om de hoeken van X-, Y- en Z-assen uit te drukken, die loodrecht onder elkaar staan in de richting van het object. A, B en C verwijzen naar de sequentiële rotatiehoeken. Elke robotfabrikant definieert deze A, B en C rotatievolgorde anders, zoals Rz-Ry-Rz, Rz-Ry-Rx of Rx-Ry-Rz.
Bijvoorbeeld, Rz-Ry-Rx. Hierbij betekent Rz de rotatie in de Z-as, Ry de rotatie in de Y-as en Rx de rotatie in de X-as. Rz kan worden uitgedrukt als hoek A, Ry als hoek B en Rx als hoek C om de huidige rotatierichting van een object aan te geven. Let op dat zodra er een rotatie in de Z-asrichting is gemaakt vanaf de coördinaten, er rotaties worden gemaakt op basis van nieuwe coördinaten.
Dit kan worden gevisualiseerd met stap 1 t/m 4.
Stel dat er coördinaten zijn (X, Y, Z).

RZ: Roteer Een graden vanaf de Z-as.
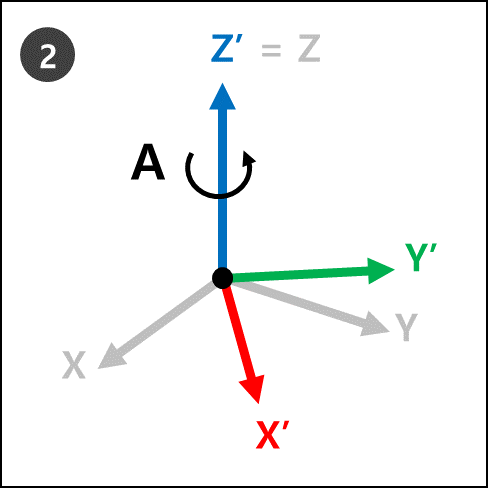
Ry : Draai in stap 2 B graden vanaf de nieuwe Y-as (Y') van de nieuwe coördinaten (X', Y', Z').
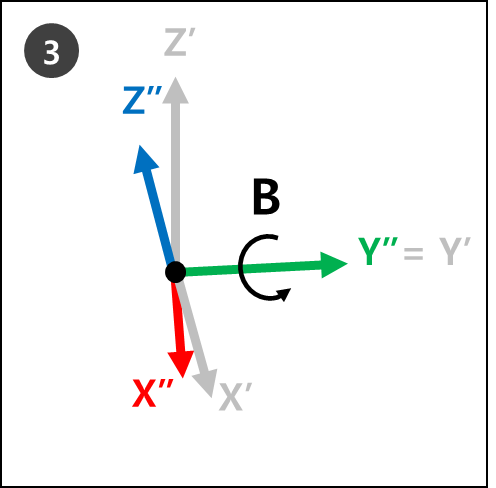
RZ : Roteer met C graden vanaf de nieuwe X-as (X'') van de nieuwe coördinaten (X'', Y'', Z'') in stap 3.
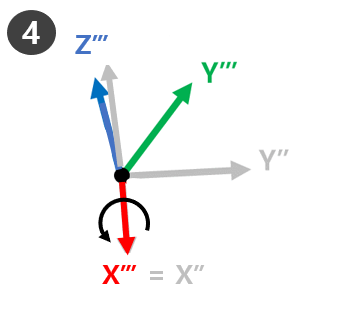
De nieuwe coördinaten (Z''', Y''', X''' van stap 4 verwijzen naar de huidige robotrotatie wanneer Euler Angles A, B en C worden toegepast.
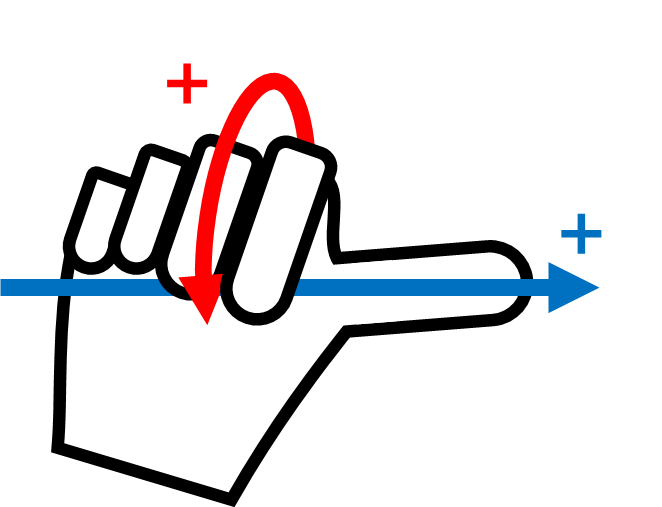
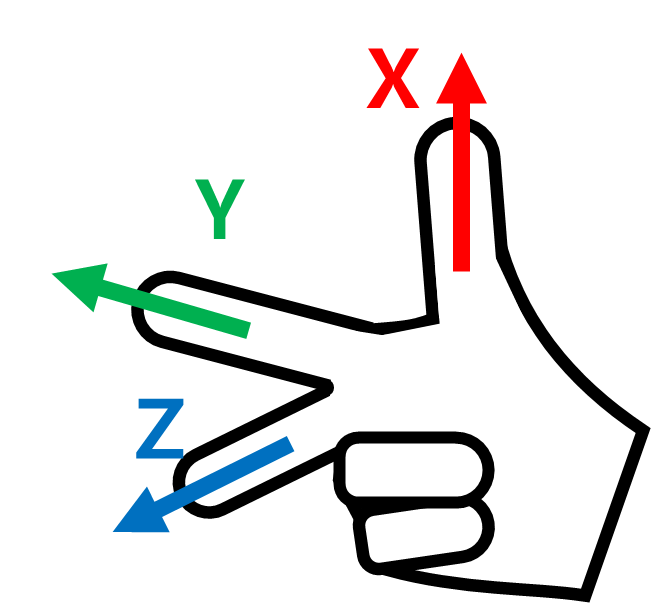
Dit kan gemakkelijk met de rechterhand worden gevisualiseerd. Maak de volgende pose met je rechterhand. Dit wordt de rechterregel genoemd. Als u de duim (X-as), wijsvinger (Y-as) en middelvinger (Z-as) loodrecht op elkaar laat staan, worden coördinaten gecreëerd die bestaan uit X-, Y- en Z-assen.
Maak vervolgens de rechtse regel cartesiaanse pose en maak rotaties Rz, Ry en Rx in opeenvolgende volgorde.
Rz: Draai de middelvinger (Z-as) met A graden.
Ry: Draai de wijsvinger (Y-as) met B graden.
Rx: Draai de middelvinger (X-as) met C graden.
Opmerking
De + draairichting van A, B en C is de richting van vier vingers behalve de duim, wanneer de duim naar de + richting wijst en de vier vingers zijn vastgeklemd. Dit wordt de wet van de schroef met de klok mee genoemd.