
Uitvoeren op basis van Robot Tool

Volg deze stappen om de robot te verplaatsen op basis van het robotgereedschap:
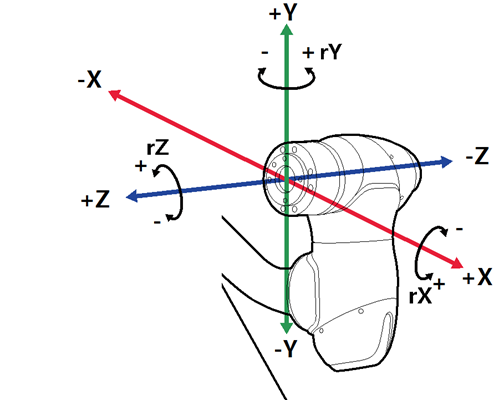
- Selecteer het gereedschap als referentiecoördinatensysteem.
- Selecteer in het taakpaneel de as (X~RX) waarvan u de hoek wilt aanpassen.
- Houd een richtingsknop (+,_) ingedrukt om de overeenkomstige as te verplaatsen.
Opmerking
- Veiligheidszone is niet van toepassing in de virtuele modus.
- Rx, Ry en RZ worden uitgevoerd volgens TCP (tool center position).