
Wereldcoördinaten instellen
De coördinaten die de robot en het werkstuk vertegenwoordigen, kunnen worden ingesteld. Dit coördinatensysteem wordt Wereldcoördinaten genoemd en verschilt van de Basiscoördinaten, die aan de basis zijn bevestigd. Het is mogelijk om de pose van basiscoördinaten in te stellen met behulp van wereldcoördinaten, en wereldcoördinaten kunnen worden geselecteerd bij het instrueren en verplaatsen met de robot in Task Builder en Task Writer. Als u de wereldcoördinaten wilt instellen, tikt u op de knop 
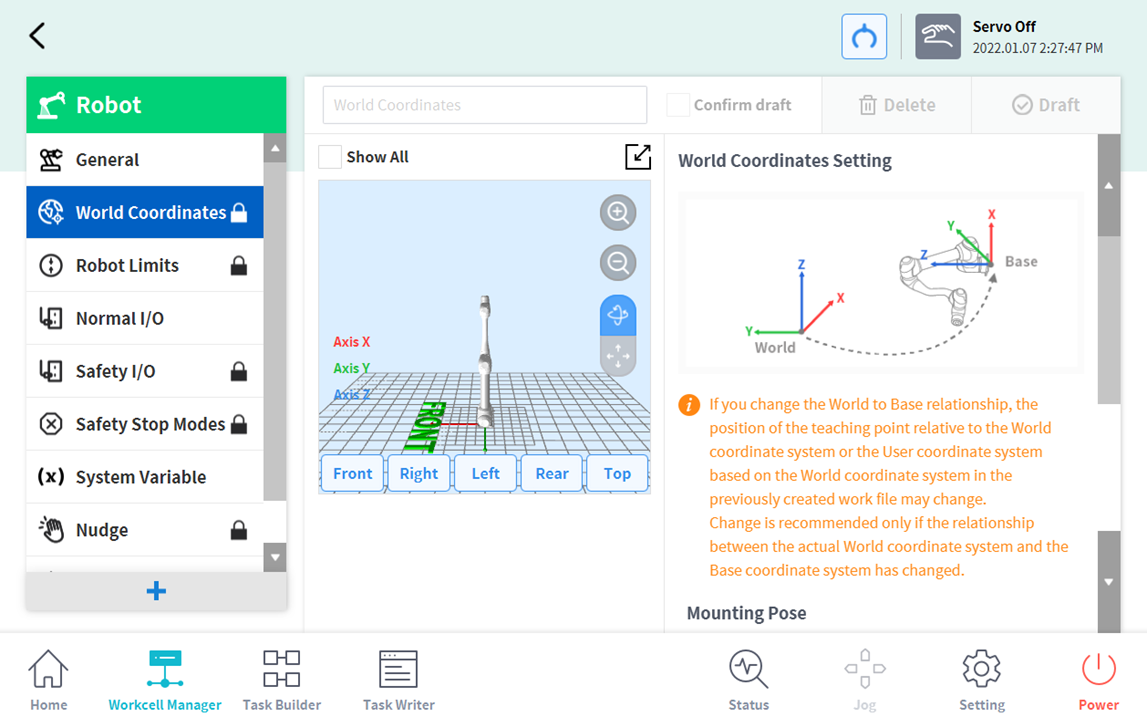
- Tik bovenaan op de knop Bewerken.
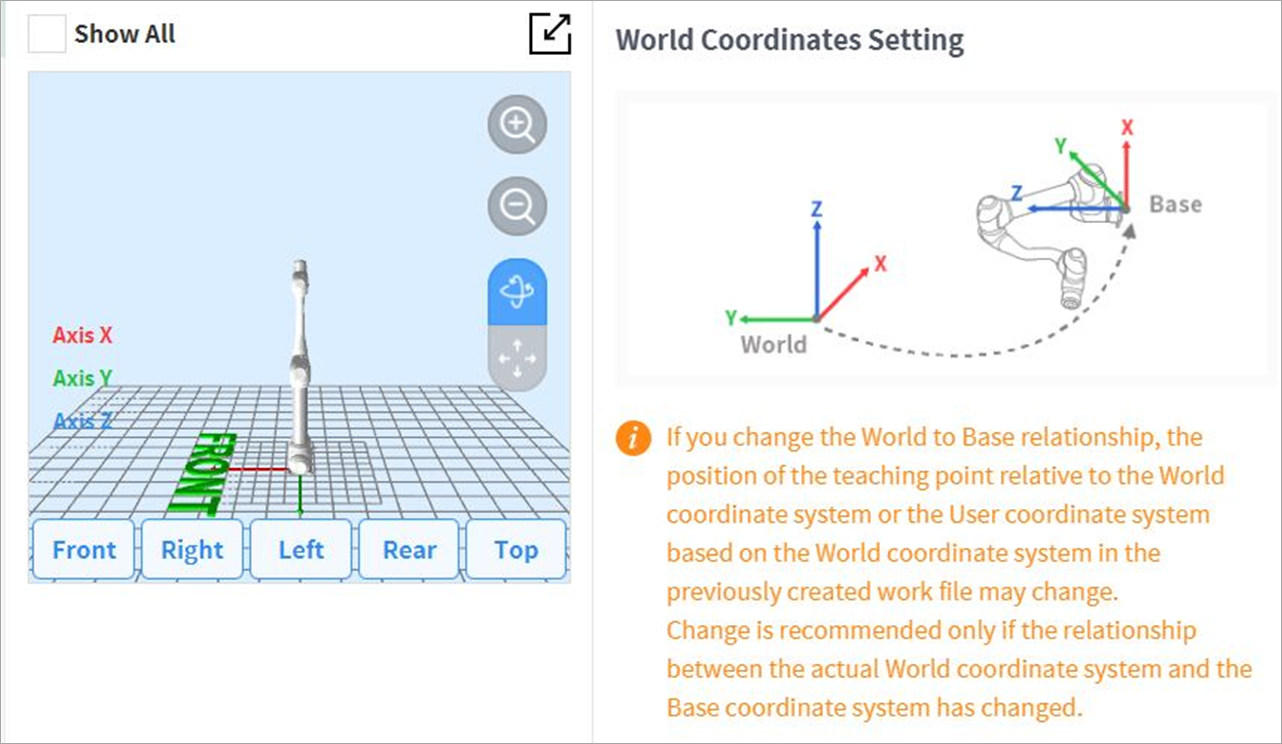
- Raadpleeg de afbeelding die de relatie tussen wereldcoördinaten en basiscoördinaten weergeeft, evenals de bijbehorende voorzorgsmaatregelen.
Waarschuwing
Wanneer de relatie tussen wereld- en basiscoördinaten wordt gewijzigd, kan het instructiepunt van wereldcoördinaten of gebruikerscoördinaten op basis van wereldcoördinaten veranderen. Wijzigingen worden alleen aanbevolen wanneer de feitelijke relatie tussen Wereldcoördinaten en Basiscoördinaten wordt gewijzigd.
- De montagepose (installatiehelling) wordt rechts in het midden weergegeven. Over het algemeen beschrijven Wereldcoördinaten de werkomgeving vanuit het perspectief van de gebruiker, dus de Z-richting van Wereldcoördinaten is in de richting van het plafond. Omdat één as van basiscoördinaten is bevestigd aan het onderste vlak van de robot, verandert de relatie tussen wereldcoördinaten en basiscoördinaten afhankelijk van de installatielocatie/-pose van de robot. In bovenstaande afbeelding wordt ervan uitgegaan dat de robot aan een muur is geïnstalleerd. In dit geval staat de Z-as van basiscoördinaten loodrecht op de wand, die parallel loopt aan de Y-as van Wereldcoördinaten, en worden de helling en rotatie van de montagepose respectievelijk weergegeven als 90 en 0 graden. De relatie tussen Wereld- en Basiscoördinaten wordt gedefinieerd als de relatie van de Basiscoördinaten ten opzichte van Wereldcoördinaten. Als er een vooraf gedefinieerde indeling voor de werkomgeving is, stelt u de coördinaten dienovereenkomstig in. De waarden X/Y/Z vertegenwoordigen beweging en de waarden A/B/C vertegenwoordigen rotatie op basis van de definitie van Euler Z-Y-Z. Als de montagepose wordt gedefinieerd volgens de installatiepose van de robot, is het passend om de rotatiehoek van B/C te gebruiken als de montagepose B/C. Als de montagepose echter wordt ingesteld met behulp van de automatische aanname-functie, kan de veronderstelde waarde een afwijking bevatten, dus het is raadzaam om de rotatiehoek te gebruiken die is gedefinieerd volgens de indeling.
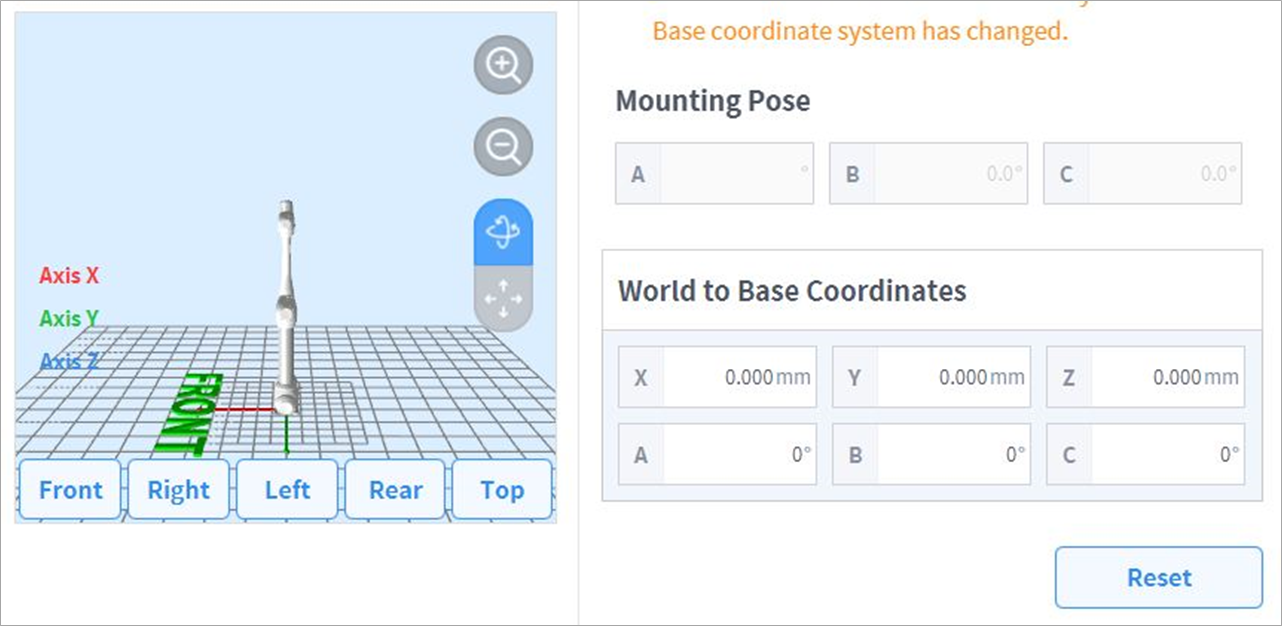
- Tik op de knop Toepassen.
- Tik op de knop Bevestigen.
Opmerking
Als gebruikersprogramma's die met Task Builder en Task Writer zijn gemaakt nadat de installatie-inclinatie is toegepast in softwareversies lager dan GF020400, bijgewerkt moeten worden naar softwareversies hoger dan GF020400, moet eerst de installatie-inclinatie worden toegepast. Daarna moeten Wereldcoördinaten worden ingesteld en moeten alle Basiscoördinaten in het gebruikersprogramma worden geconverteerd naar Wereldcoördinaten om bestaande instructiepunten correct te kunnen gebruiken.
Als meerdere robots in een gemeenschappelijke werkruimte werken of als de robot is geïnstalleerd op een bewegend apparaat, zoals een mobiele basis of lineaire track, kunnen de relatie en positie van het instructiepunt tussen het werkstuk en de robotbasis veranderen. In dergelijke omgevingen kunnen Wereldcoördinaten, die gemakkelijk kunnen worden aangeleerd en gedeeld, worden ingesteld.
Wanneer een tool wordt geïnstalleerd of vervangen, moet het gewicht van de tool worden geconfigureerd voordat de robot wordt gebruikt. Meer informatie over het instellen van het toolgewicht vindt u in Toolgewicht instellen.