
Wat is Singularity?
Singulariteit in een multijoint robot verwijst naar een positie (of punt) waar de robot moeite heeft om zijn volgende houding tijdens het bewegen te berekenen. Multijoint-robots berekenen elke verbindingshoek tijdens de beweging op basis van het roboteinde
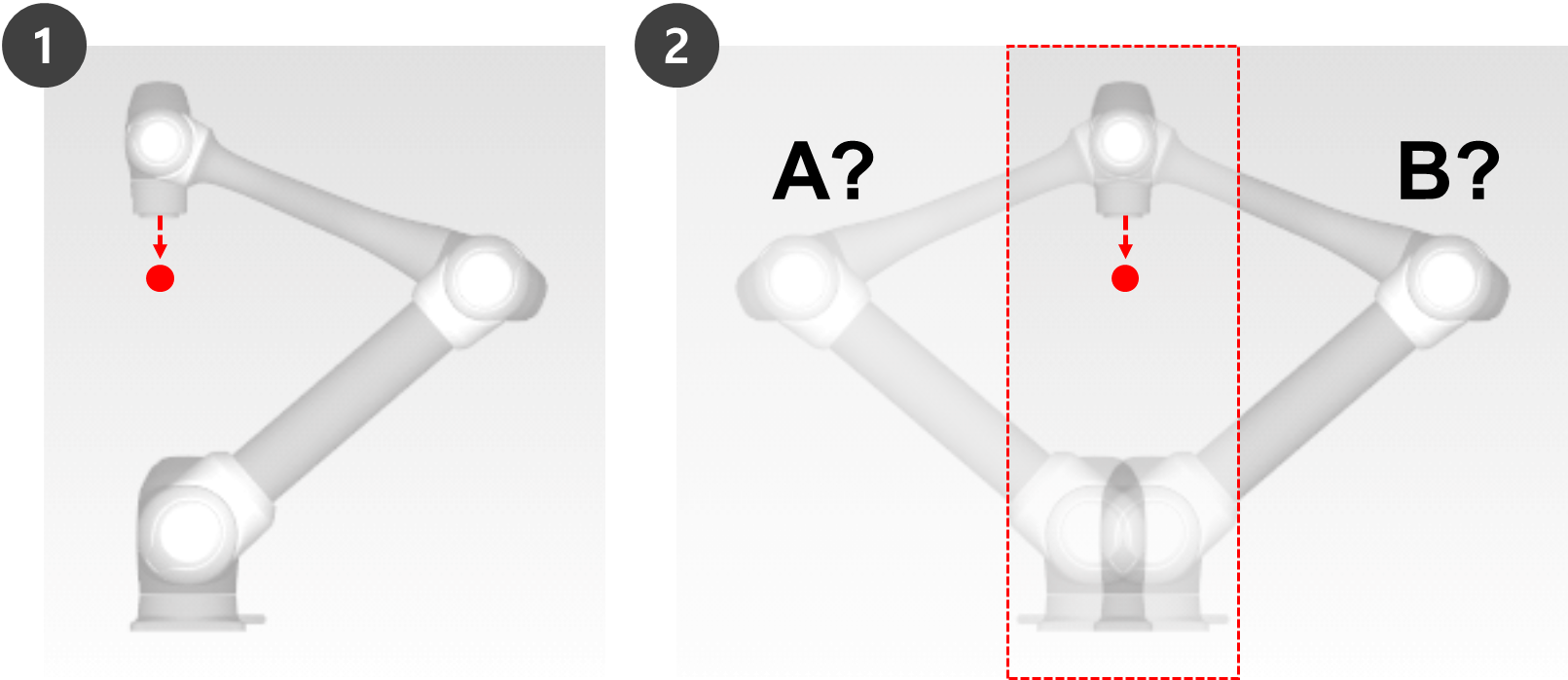
Bijvoorbeeld in afb. 1 hieronder kan de robot, wanneer de robot naar de rode stip beweegt, niet bepalen of de gewrichten moeten worden verplaatst om positie A in te stellen of positie B te stellen, zoals weergegeven in afb. 2. Deze positie (of punt) wordt de singulariteit genoemd.
In de buurt van een singulariteit is de robotbeweging niet vloeiend in termen van vlak, punt en lijn, kan de lineaire beweging van het roboteinde niet worden gehandhaafd en kan de positiefout tijdens de besturing toenemen. Singulariteit treedt op in drie gevallen, zoals weergegeven in de volgende afbeelding, inclusief wanneer de robotgewrichten een lijn vormen.
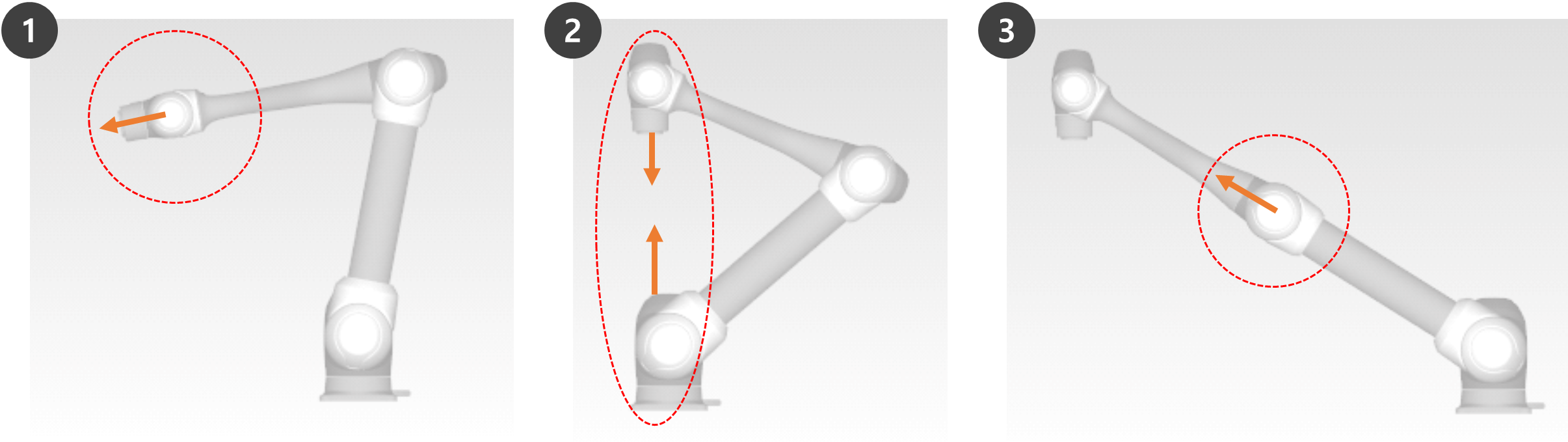
Singulariteit van de pols: Wanneer de robotpols een lijn vormt als as 5 0º nadert
- In vergelijking met een menselijke arm komen de assen 4, 5 en 6 overeen met het polsgewricht.
- Schouder-singulariteit: Wanneer as 1 en 6 op dezelfde lijn staan
- In vergelijking met een menselijke arm komen assen 1 en 2 overeen met het schoudergewricht.
- Elleboog-singulariteit: Wanneer de robot een lijn vormt als as 3 0º nadert
- In vergelijking met een menselijke arm komt as 3 overeen met de elleboog.
Let op.
Handmatige en automatische bewerkingen die bewegen met gewrichtsrotatie worden niet beïnvloed door singulariteit.
- Taakverplaatsing, opdracht MoveL, enz.
- Singulariteit treedt alleen op tijdens handmatige en automatische werking waarbij de robot stopt met het uitvoeren van lineaire beweging.
- Gewrichtsbeweging, MoveJ-commando's, enz.
- In de singularity-zone is er geen controle over de naleving of controle op naleving beschikbaar.
- Als de rotatiesnelheid van bepaalde assen snel toeneemt wanneer een lineaire beweging een singulariteit passeert, is het mogelijk dat een Joint Speed Limit-overschrijding of Joint Angle Limit-schending optreedt.
Hoe te om Singularity te vermijden
Doosan Robotics-robots bieden opties om singulariteiten te vermijden tijdens motion control. Het wordt echter aanbevolen om een taak te configureren die geen uitzonderingen maakt met behulp van gezamenlijke bewegingsopdrachten zoals MoveJ in singularity-zones.