
Start het programmeren
VERPLICHT EENVOUDIG 3 MIN.
Let op.
- Voor het programmeren moeten de veiligheidsinstelling, de installatie van de pose en de gereedschapsinstelling worden voltooid met de Workcell Manager. Zie voor meer informatie Stap 3. Werking en instelling van de robot.
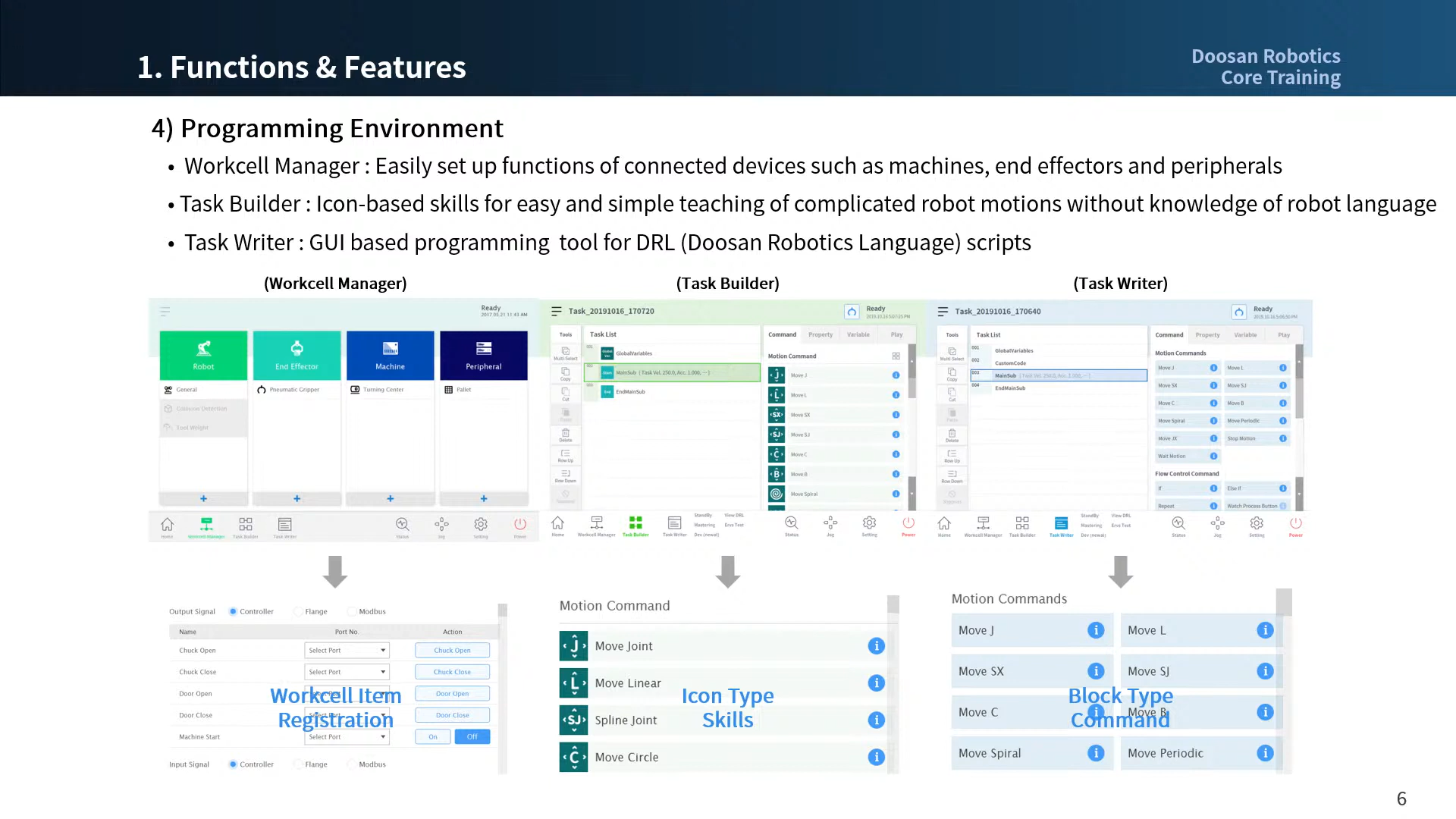
Doosan Robotics biedt twee soorten omgevingen voor taakprogrammering.
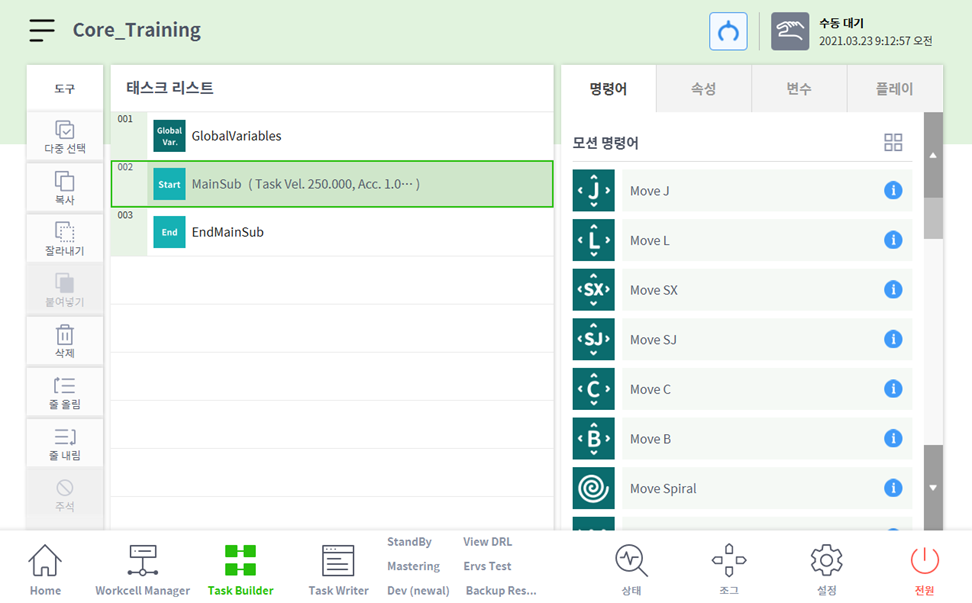
- Task Builder: Het is een op iconen gebaseerde codeomgeving met commando- en vaardigheidspictogrammen. Vaardigheden worden ondersteund op basis van werkcel-items die zijn geregistreerd in Workcell Manager.
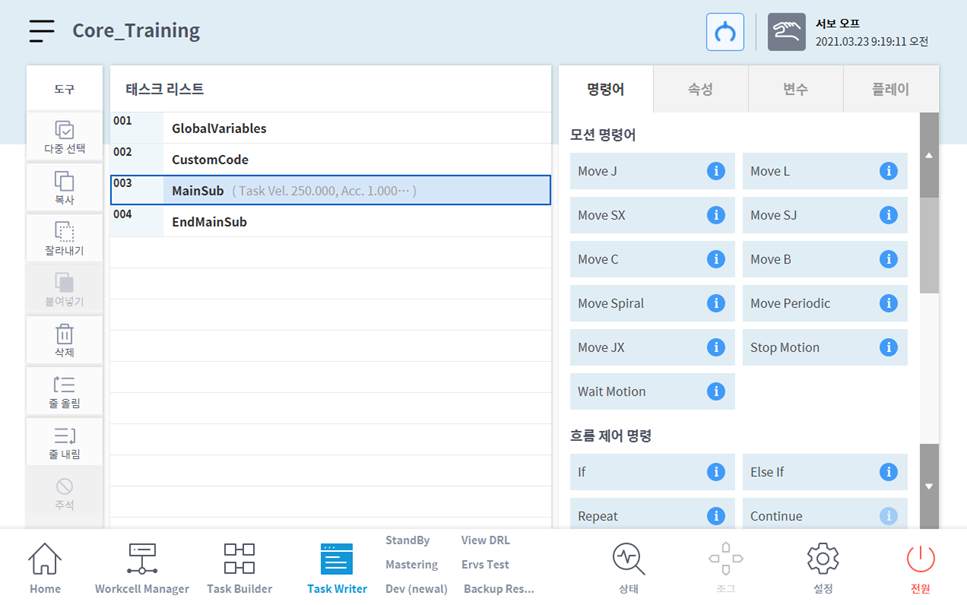
- Schrijver van de taak: Het is een op blokken gebaseerde codeeromgeving die gebruik maakt van scriptgebaseerde programmering voor eenvoudige invoer naar de teach hanger
Het verschil tussen de twee programmeeromgevingen is als volgt: In het algemeen gebruiken beginnende gebruikers of gebruikers die vaardigheden willen gebruiken de Task Builder. Intermediaire gebruikers die geen vaardigheden willen gebruiken, gebruiken de Task Writer voor snelle programmering.
| Classificatie | Task Builder | Task Writer | |
|---|---|---|---|
| 1 | Onderwerpen | Beginnende gebruikers of gebruikers die vaardigheden moeten gebruiken | Tussenliggende gebruikers |
| 2 | Op blokken gebaseerde codering | O | O |
| 3 | Gebruik van opdrachtpictogrammen | O | X |
| 4 | Ondersteuning van vaardigheden | O | X |
| 5 | Scherm |
|
|
Opmerking
Wat is Skill of Doosan Robotics-robots?
- Het is een commando dat de interface configureert voor eenvoudig gebruik door verschillende commando's die nodig zijn in een proces te bundelen met één instelling.
- Deze kan alleen worden gebruikt in de Task Builder en elke vaardigheid wordt weergegeven als één blok. De pictogramblokken van Task Builder voor Pick Skill en Place Skil zijn bijvoorbeeld als volgt:
