
Installatiepose van de robot instellen
De robot kan in elke hoek worden geïnstalleerd. Als u de robotinstallatiepose wilt configureren, tikt u op de knop 
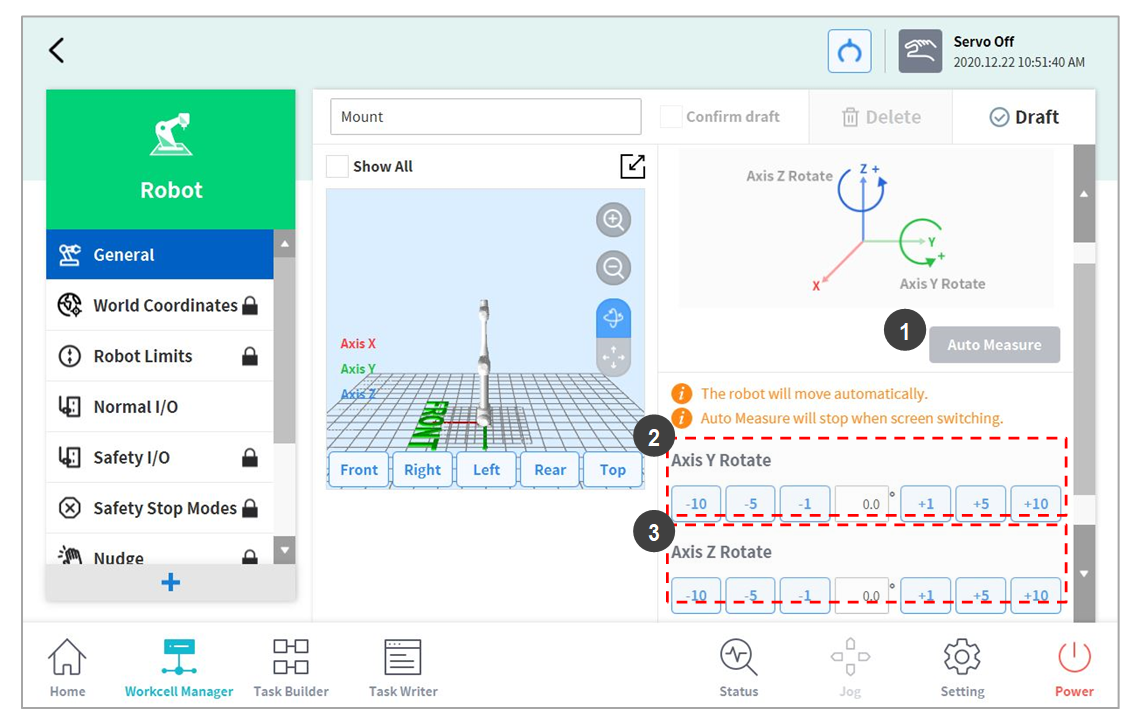
Nr. | Item | Omschrijving |
|---|---|---|
1 | Auto Calculate | Berekent automatisch de installatiehoek van de robot. |
2 | Y-axis Rotation Setting | Voer de Y-as hoek van de robot in tijdens de installatie. |
3 | Z-axis Rotation Setting | Voer de Z-as hoek van de robot in tijdens de installatie. |
Opmerking
Tik op de knop Automatisch berekenen als u de inclinatiewaarde automatisch wilt laten berekenen. De functie Automatisch berekenen kan worden gebruikt wanneer de robotbasis meer dan 5 graden schuin staat ten opzichte van de grond. Met de functie Automatisch berekenen voor de robotinstallatiepose kan de vereiste installatiepose eenvoudig worden geconfigureerd door middel van directe teach-, krachtcontrole- en compliancecontrolefuncties, zonder dat nauwkeurige waarden voor de installatiehoek hoeven te worden ingevoerd. De absolute positienauwkeurigheid van de automatisch berekende robotpose-instelling kan echter lager zijn dan die van de nauwkeurig gemeten waarden.
Let op