
Werkcel item - Robot-installatie toevoegen pose (montage)
OPTIONEEL EENVOUDIG 3 MIN.
De robot installatie pose kan worden ingesteld door een robot installatie pose (mount) workcell item toe te voegen. Als de robot op een vlakke ondergrond is geïnstalleerd, kan deze stap worden overgeslagen.
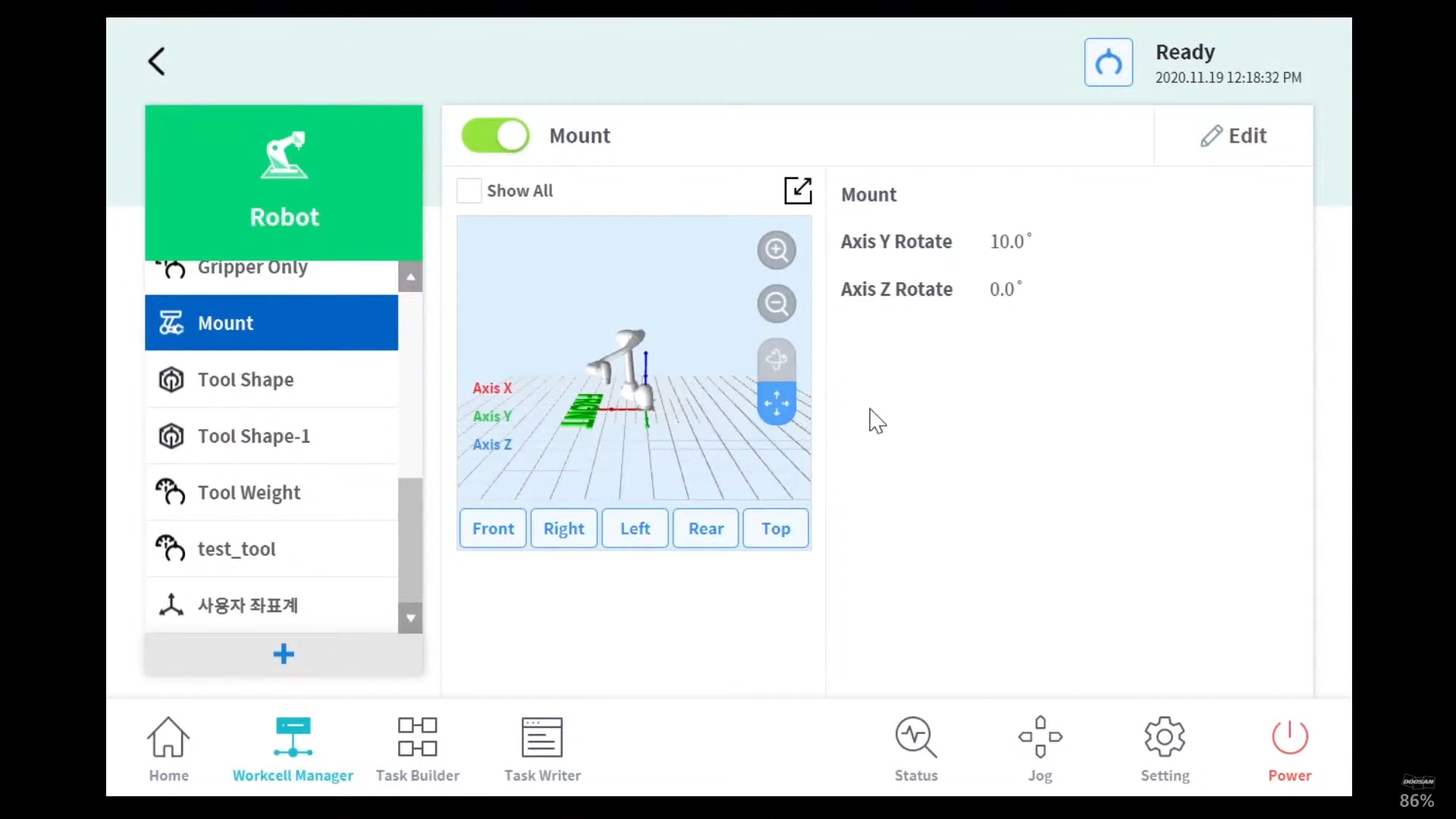
Robot installatie pose kan ingesteld worden via workcell Manager > Robot > 
- De installatiehoek kan worden gemeten met de automatische meetfunctie. Als de hoek echter minder dan 5 graden is, is automatische meting niet beschikbaar.
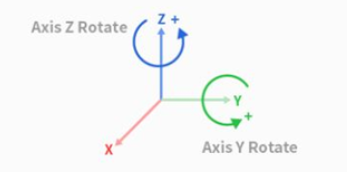
- Als de robot aan het plafond of de muur is gemonteerd, kan de installatiehoek van de robot worden ingesteld met de rotatie van de Y-as en de Z-as.
- Omdat de automatische berekening van het werktuiggewicht wordt uitgevoerd op basis van de zwaartekracht, is het raadzaam het gewicht van het gereedschap te resetten zodra de montage is ingesteld.
Zodra het werkcel-item is geregistreerd (bevestigd), moet de tuimelschakelaar worden ingeschakeld om het werkcel-item te kunnen gebruiken.
Let op.
- Bij het instellen van de robot installatie pose (mount) workcell item, is het raadzaam om ook de wereldcoördinaten te veranderen. Als de wereldcoördinaten niet worden veranderd, wordt de robot op het robotsimulatorscherm van de hanger van het programmeerapparaat weergegeven als de robot die op het vlakke oppervlak wordt geïnstalleerd (basis).