Vaardigheid - Probeer Pick & Place-samples
OPTIONEEL NORMAAL 20 MIN.
Dit voorbeeld wordt gemaakt in de Task Builder. De Task Writer ondersteunt de vaardigheidsfunctie niet.
Let op.
- Lees en volg voordat u het monster probeert Voorzorgsmaatregelen voor gebruik. Zie voor meer informatie DEEL 1. Veiligheidshandleiding.
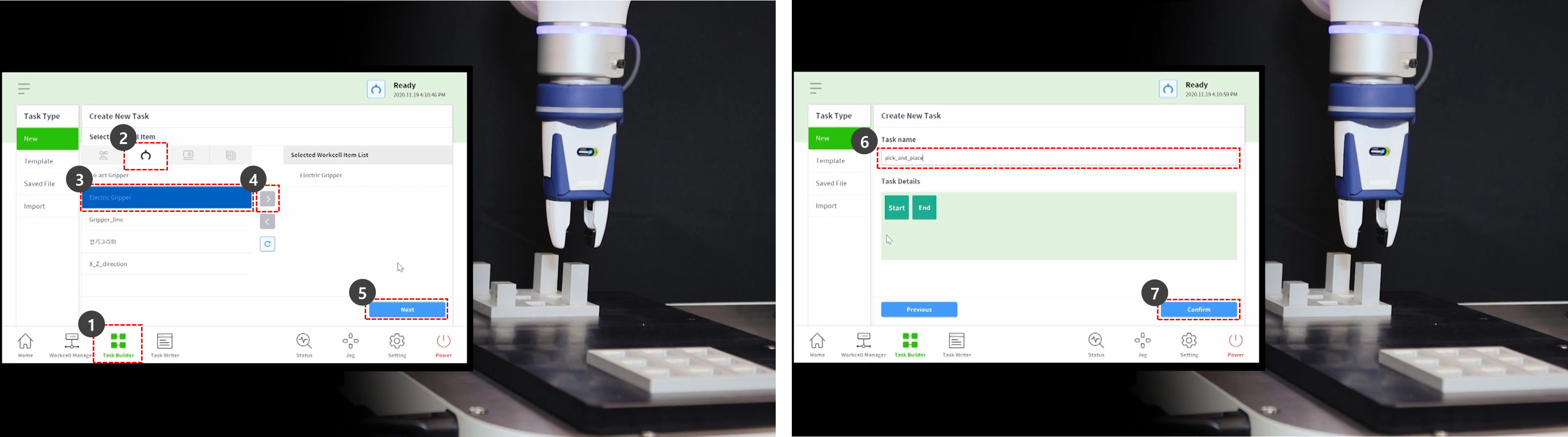
- Selecteer Taaksamensteller in het onderste menu.
- Selecteer het pictogram werkcel-item selecteren > grijper.
- Selecteer de grijper die is geregistreerd als een werkcel-item. Dit voorbeeld kan niet worden geprobeerd als er geen grijper is geregistreerd als een werkcel-item.
- Druk op de knop > om het werkcel-item te registreren als het geselecteerde werkcel-item.
- Druk op de knop volgende.
- Voer de taaknaam in.
- Druk op bevestigen.
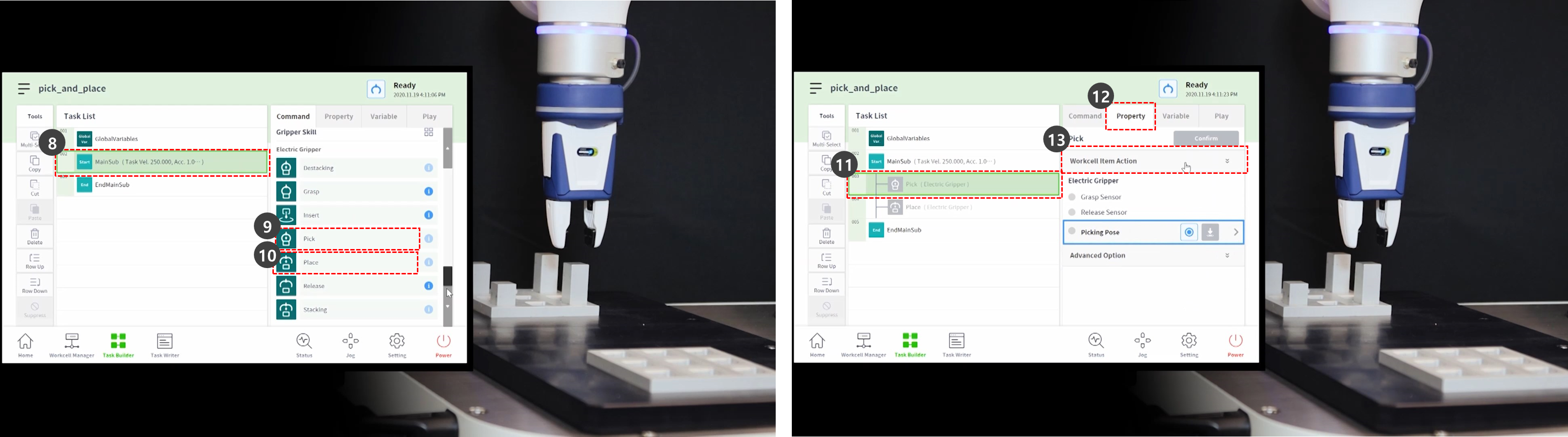
- Selecteer de opdracht MainSub op de tweede regel van de takenlijst. Er wordt een nieuwe opdracht toegevoegd aan de volgende regel van de geselecteerde regel.
- Voeg de opdracht Kies vaardigheid toe.
- Voeg de opdracht plaats vaardigheid toe.
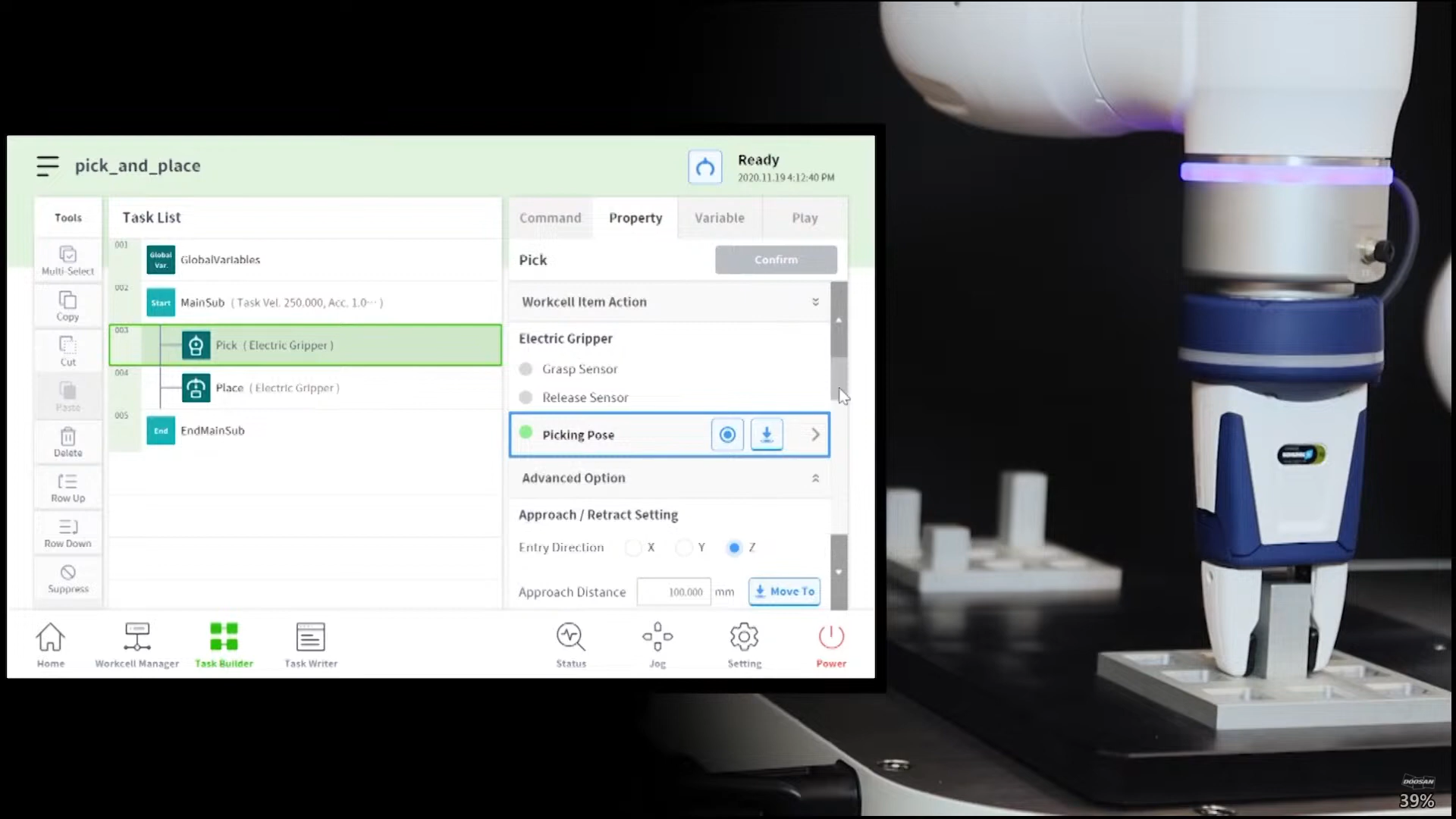
- Selecteer de opdracht kiezen op de derde regel van de takenlijst.
- Selecteer het tabblad eigenschap.
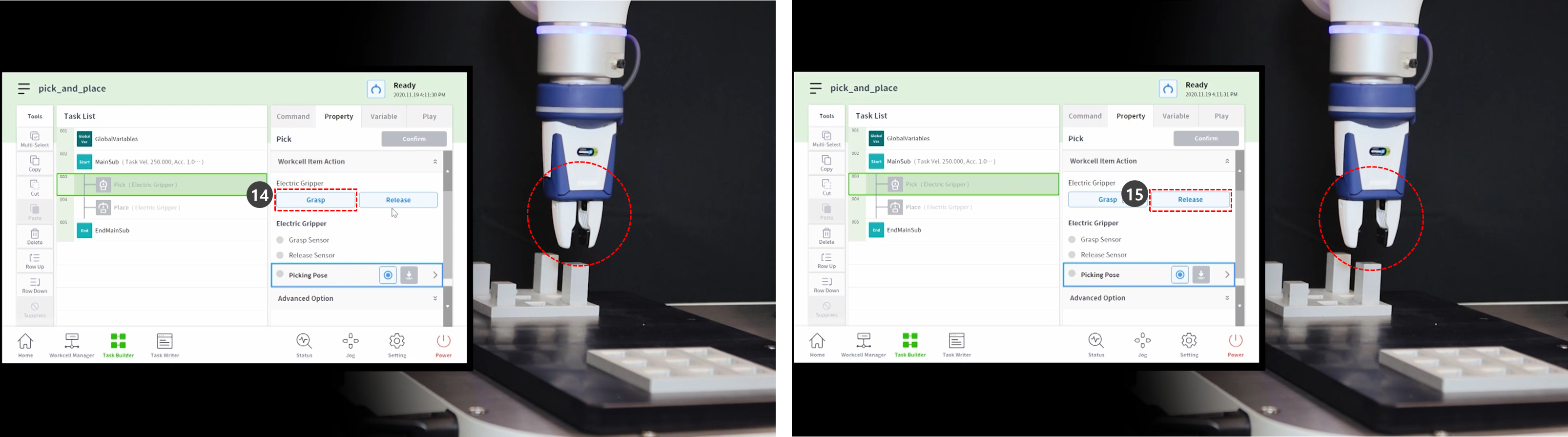
- Druk op de werkcel item Actie om het menu uit te vouwen. Als het werkcel-item van de grijper is geselecteerd, kan de werking van de grijper worden getest tijdens de actie werkcel-item.
- Om de grijper te testen, drukt u op de grijpknop en voert u een grijpbeweging uit.
- Om de grijper te testen, drukt u op de ontgrendelknop en laat u de grijper los.
- Bij lichte werkstukken plaatst u het werkstuk in de grijper en drukt u op de grijpknop om de robot het werkstuk vast te laten houden. Het geven van onderwijs terwijl de grijper een werkstuk vasthoudt kan helpen een nauwkeurige positie te bepalen.
- Het is echter niet verplicht om de robot tijdens het lesgeven een werkstuk vast te houden, maar een voorbeeld.
- In het geval van zware werkstukken kunnen zich gevaarlijke situaties voordoen, omdat de grijper het werkstuk kan verliezen.
- Bij zware werkstukken moet het gereedschapsgewicht van de gereedschapsinstellingen het gereedschapsgewicht en het werkstukgewicht omvatten.
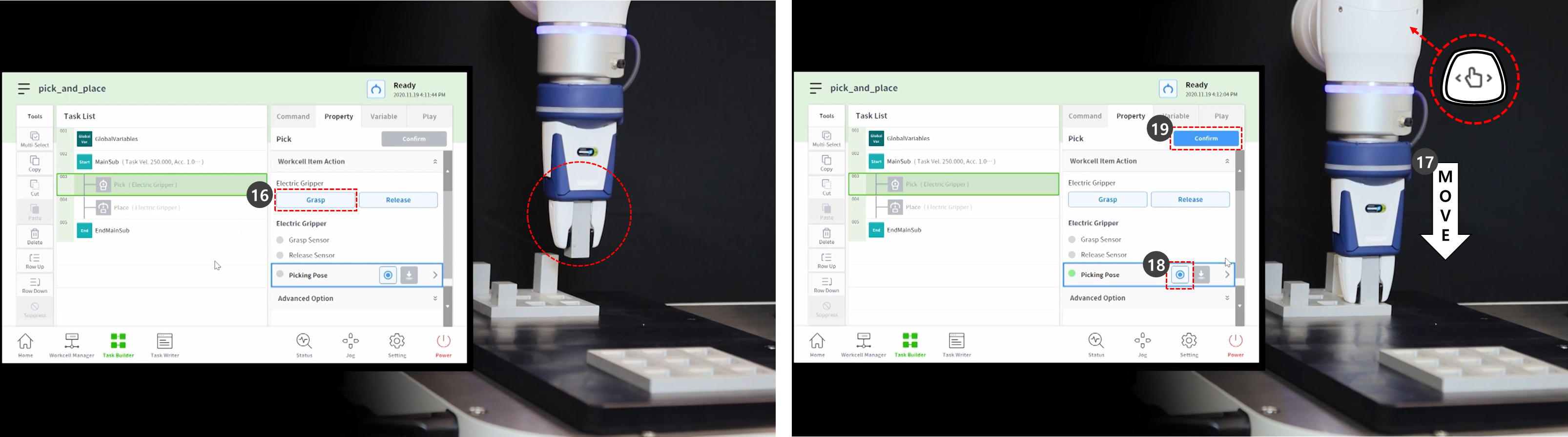
- Gebruik direct lesgeven om de robot naar het punt te verplaatsen waar Pick zal worden uitgevoerd.
- Houd de handgeleidingsknop in de cockpit ingedrukt om de robot te verplaatsen.
- Druk op de knop Get pose van de Picking pose.
- Druk op de bevestigingstoets.
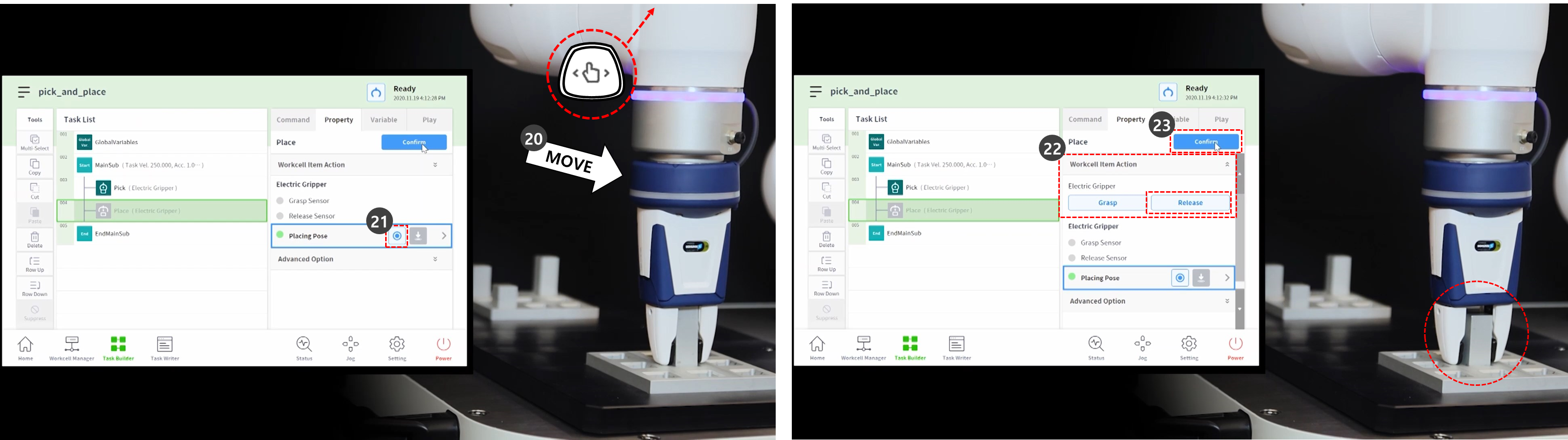
- Gebruik direct lesgeven om de robot naar het punt te verplaatsen waar plaats zal worden uitgevoerd.
- Druk op de knop Get pose van de pose plaatsen.
- Om het werkstuk uit de grijper te verwijderen, drukt u op de ontgrendelknop.
- Druk op de bevestigingstoets.
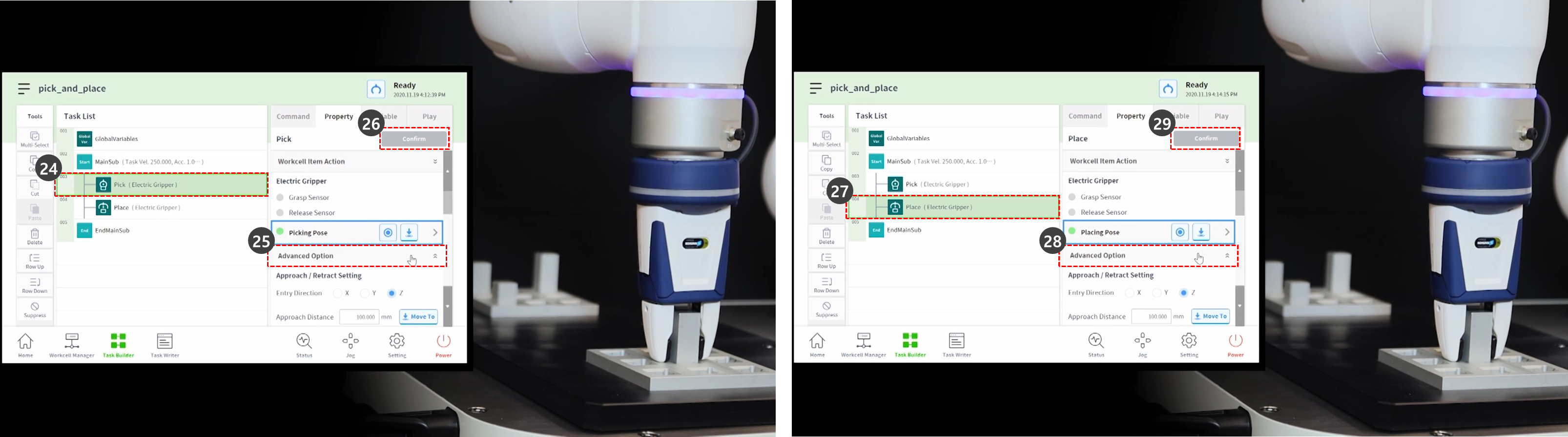
- Als u gedetailleerde instellingen voor de opdrachten Kies en plaats voor vaardigheden wilt instellen, selecteert u de opdracht kiezen op de derde regel van de takenlijst.
- Druk op de geavanceerde optie om het menu uit te vouwen en stel het als volgt in: Gebruik standaardwaarden voor items die hieronder niet worden beschreven.
- Ingangsrichting: Z-as
- Hiermee wordt de richting voor het invoeren van de Pick Position ingesteld.
- Benaderingsafstand: 100 mm
- Hiermee wordt de afstand ingesteld vlak voordat de robot de Pick-positie nadert. Het zorgt voor voldoende afstand bij benadering.
- Inschuifafstand: 100 mm
- Hiermee wordt de afstand ingesteld nadat de robot in de ingestelde richting uit de Pick-positie is teruggetrokken. Het zorgt voor voldoende inschuifafstand.
- Benaderingssnelheid: 100 mm/s
- De benaderingssnelheid wordt lager ingesteld dan de standaardwaarde wanneer de robot een object nadert.
- Nalevingscontrole: Ingeschakeld (groen)
- Detectiecontact: Ingeschakeld (groen)
- Het maakt Compliance Control en contactdetectie mogelijk.
- Contactkracht: 10 N.
- Contacttolerantie: 10 mm
- Kracht: 15 N.
- Krasverschil: 2 mm
- Laat de grijper los voordat u gaat picken: Ingeschakeld (groen)
- De grijper wordt in de status vrijgeven geplaatst voordat de pick-locatie wordt benaderd.
- Gewicht gereedschap: Geen
- Als het werkstuk niet licht is, moeten het gewicht van het werkstuk en het gewicht van het gereedschap worden opgeteld, als werkcelitem gereedschapsgewicht worden toegevoegd en worden geselecteerd.
- Ingangsrichting: Z-as
- Druk op de bevestigingstoets.
- Selecteer de opdracht plaats op de vierde regel van de takenlijst.
- Druk op de geavanceerde optie om het menu uit te vouwen en stel het als volgt in: Gebruik standaardwaarden voor items die hieronder niet worden beschreven.
- Ingangsrichting: Z-as
- Benaderingsafstand: 100 mm
- Inschuifafstand: 100 mm
- Benaderingssnelheid: 100 mm/s
- Nalevingscontrole: Ingeschakeld (groen)
- Detectiecontact: Ingeschakeld (groen)
- Het maakt Compliance Control en contactdetectie mogelijk.
- Contactkracht: 10 N.
- Contacttolerantie: 10 mm
- Kracht: 15 N.
- Gewicht gereedschap: Geen
- Druk op de bevestigingstoets.
- Gebruik direct lesgeven om de robot naar het punt te verplaatsen waar Pick&Place zal beginnen.
- Een werkstuk naar de Pick-locatie verplaatsen.
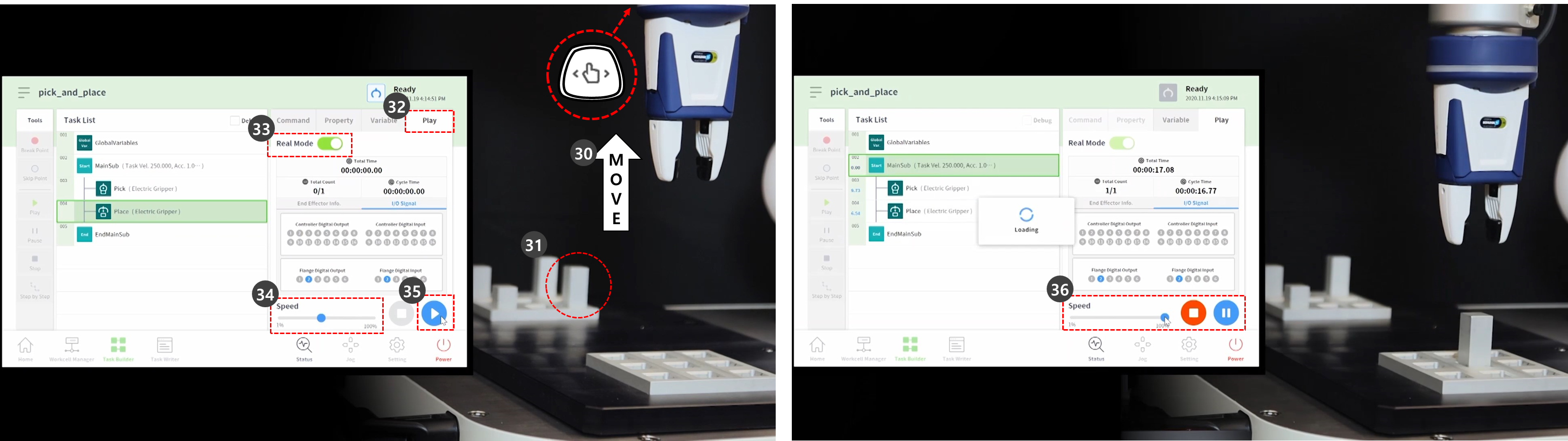
- Selecteer het tabblad afspelen.
- Schakel de schakelknop Real Mode in.
- Stel de snelheidsschuifbalk in op 10-30%.
- Deze schuifbalk voor de snelheid stelt de ingestelde snelheid van alle opdrachten in op het geselecteerde %.
- Wanneer een taak voor de eerste keer na de creatie ervan wordt uitgevoerd, kan het uitvoeren ervan op een lage snelheid onverwachte risico's voorkomen.
- Druk op de knop afspelen.
- Als de taak zonder problemen is voltooid, stelt u de snelheid weer in op de standaardwaarde, 100%, en test u opnieuw.