
Scherm Real-modus: Tabblad Eindeffectorinformatie
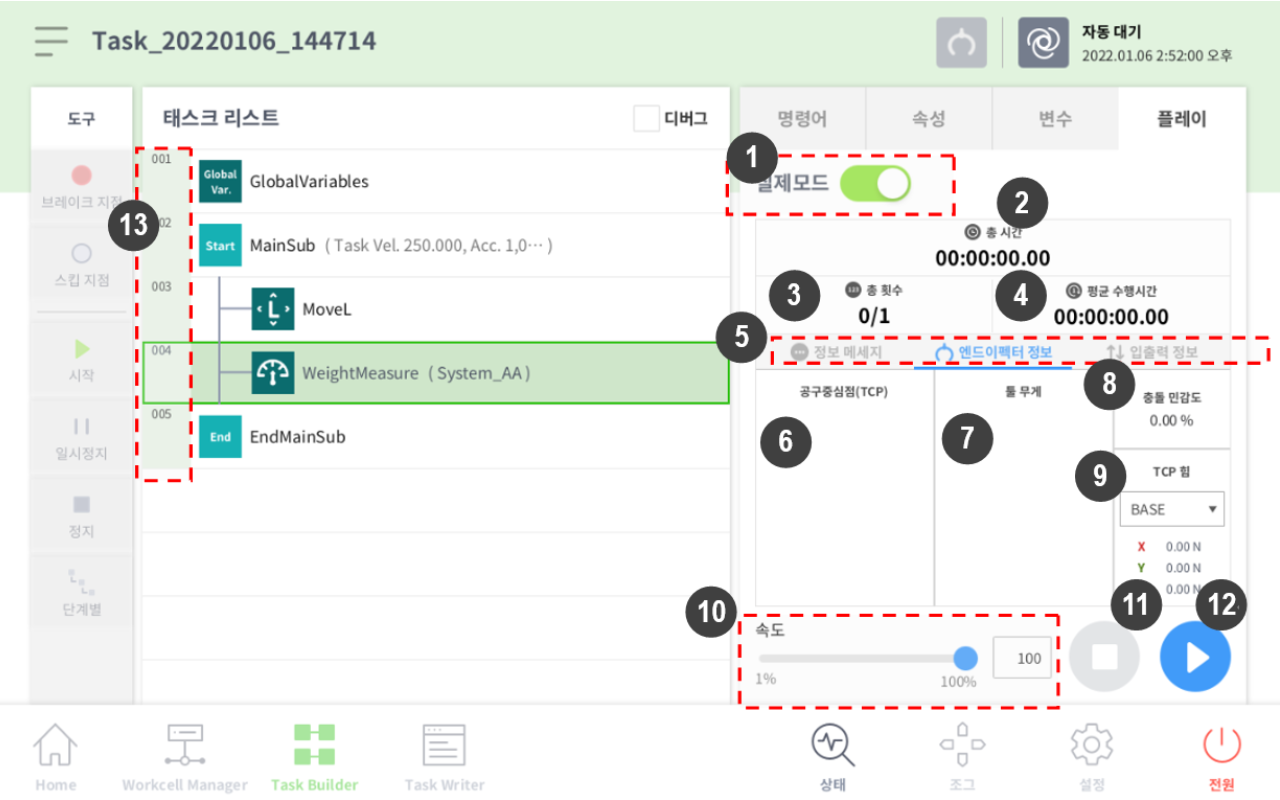
Het tabblad Eindeffectorinformatie in het scherm Real-modus van Task Builder is als volgt ingedeeld:
Nr. | Item | Omschrijving |
1 | Real Mode ( | Hiermee stelt u de testafspeelmodus voor de robot in.
|
2 | Total time | Toont de totale tijd die is verstreken na uitvoering van de taak. |
3 | Total count | Toont het totale aantal taakuitvoeringen. |
4 | Average execution time | Toont de gemiddelde tijd, besteed aan de uitvoering van één cyclus van de taak in de takenlijst. |
5 | Information Screen Shift Tab | U kunt schakelen tussen het robot Info. Bericht scherm, het eindeffector-informatiescherm en het invoer-/uitvoerinformatiescherm.
|
6 | Tool center point information area | Toont de TCP-informatie die is geconfigureerd met de configuratiefuncties voor het middelpunt en het gewicht van de tool, van de ingestelde TCP-opdracht of de jog. |
7 | Tool weight information | Toont informatie over het toolgewicht dat is geconfigureerd met de configuratiefuncties voor het middelpunt en het gewicht van de tool, van de ingestelde TCP-opdracht of de jog. |
8 | Collision information area | Toont de waarde voor botsinggevoeligheid die is ingesteld voor het gebied waarin de robot op dat moment is geplaatst. |
9 | Force information area | Het geeft de krachtinformatie weer die voorkomt in de coördinatenstelsels Basis, Wereld, Gebruiker en Referentie. Het referentiecoördinatensysteem geeft de kracht weer op basis van de informatie voor het coördinatensysteem die op de robot is toegepast. |
10 | Speed slider | Hiermee wordt de snelheid van de robot in een real- of een virtuele modus ingesteld. |
11 | Stop button | Hiermee wordt de huidige taak gestopt. |
12 | Execute/pause toggle button | Hiermee wordt het werk in de takenlijst uitgevoerd of gepauzeerd. |
13 | Time | Hiermee wordt de tijd weergegeven die aan de overeenkomstige opdracht/skill is besteed. |

Let op
- Voordat u een taak uitvoert, voert u deze in de virtuele modus uit om te controleren of de taak werkt zoals u verwacht.
- Het wordt aanbevolen om het robotprogramma te testen door tijdelijke waypoints aan te wijzen buiten de werkruimte van een andere machine. Doosan Robotics is niet aansprakelijk voor schade die ontstaat door een programmeerfout of een defecte robot, noch voor schade aan de apparatuur.
- De noodstopknop bevindt zich op de instructiependant. Druk in een noodsituatie op de noodstopknop om de robot te stoppen.
In het geval van modellen zonder krachtsensor worden de krachtwaarden (X, Y, Z) niet bewaakt.